经由挠性接头致动的可控透镜的制作方法
1.本发明涉及具有可变焦距的透镜,比如用于在小型相机中使用的可变透镜。
背景技术:
2.在照相机和其他电子装置中使用可变焦距的透镜是非常令人感兴趣的,因为这种透镜可以代替配置有用于使透镜移位以实现可变焦距的马达的多透镜系统。可变焦距的透镜可以用于提高电子装置的性能和/或用于减小尺寸。仍然需要改进可变透镜的性能和质量,比如降低透镜的波前误差性能。
技术实现要素:
3.本发明的目的是改进可变焦距透镜。特别地,本发明的目的是提供一种合适的致动器机构,其包括一种将致动器运动传递到透镜膜的方式,该方式不会导致膜的变形,所述变形可能导致像差和波前误差的产生。
4.在本发明的第一方面,提供了一种具有可变光焦度的可控透镜,该透镜包括
[0005]-第一覆盖构件和第二覆盖构件,其中,第一覆盖构件和第二覆盖构件中的一个是透明的,而第一覆盖构件和第二覆盖构件中的另一个是透明的或反射性的,
[0006]-夹置在第一覆盖构件和第二覆盖构件之间的透明的、可变形的非流体本体,使得第一透明覆盖构件和第二透明覆盖构件以及非流体本体构成透镜,该透镜具有与第一覆盖构件和第二覆盖构件以及非流体本体相交的光轴,
[0007]-一个或更多个致动器,其包括多个致动器位移元件,这些致动器位移元件被布置成在与光轴平行或基本平行的方向上移位,
[0008]-一个或更多个弹性元件,其将致动器位移元件与第一覆盖构件连接,其中,一个或更多个弹性元件中的每一个的至少一部分(比如弹性部分)被布置成响应于第一覆盖构件和致动器位移元件之间的相对径向位移而弹性变形,其中,一个或更多个弹性元件中的每一个在径向方向上具有第一刚度并且在光轴的方向上具有第二刚度,其中,第一刚度小于第二刚度。
[0009]
弹性元件的刚度可以是弹性刚度,比如弹簧的弹性系数或粘弹性刚度。刚度可以由弹性元件的尺寸和弹性材料特性(比如材料的杨氏模量)的组合给出。第一刚度和第二刚度给出了径向方向和轴向方向(沿着光轴)上的变形与导致径向变形的径向力或径向扭矩和导致轴向变形的轴向力之间的关系。
[0010]
有利地,通过弹性连接元件将致动器输出端与覆盖构件(即透镜膜)连接,弹性元件可以累积由致动器引起的覆盖构件的径向延伸的变化,所述弹性连接元件可以被设计成响应于覆盖构件的弯曲而至少在径向方向上弹性变形。相对径向位移被理解为相对径向位移的至少一个分量在径向方向上具有垂直于光轴的方向。
[0011]
弹性元件包括具有可弯曲形状的结构,该可弯曲形状被设计成在径向方向(即朝向光轴)上弯曲,而该结构在沿着光轴的轴向方向上不太能够弯曲或不可弯曲或者仅允许
较小的压缩或拉伸,其中,所述设计规定第一刚度或径向刚度小于第二刚度或轴向刚度。
[0012]
弹性变形可以包括在朝向光轴的径向方向上的变形、由于扭矩引起的在旋转方向上的变形。径向变形可以包括在0.05μm至500μm范围内的变形,比如该变形在0.1μm至250μm范围内、在0.1μm至50μm范围内、在0.5μm至50μm范围内、在1μm至25μm范围内、在2μm至500μm范围内、在5μm至500μm范围内、在5μm至250μm范围内,比如该变形在7μm至150μm范围内。
[0013]
第一覆盖构件是第一透明覆盖构件,而第二覆盖构件是第二透明覆盖构件或第二反射性覆盖构件。替代地,第一覆盖构件是第一透明覆盖构件或第一反射性覆盖构件,而第二覆盖构件是第二透明覆盖构件。
[0014]
根据一个实施例,弹性元件中的每一个被布置成响应于围绕与环绕光轴的路径相切的轴线作用的扭矩而弹性变形,其中,扭矩由第一覆盖构件和致动器位移元件之间的相对径向位移产生。
[0015]
有利地,弹性元件能够以低弹性阻力支撑由第一覆盖构件的弯曲而引起的旋转分量。
[0016]
根据一个实施例,每个弹性元件具有固定到第一覆盖构件上的第一部分和固定到致动器位移元件上或者固定到至少一个致动器位移元件上的第二部分,其中,第一部分和第二部分弹性连接,比如通过弹性元件的被布置成响应于相对径向位移而弹性变形的部分。
[0017]
有利地,固定连接提供了刚性连接,从而允许将致动器运动有效地传递到第一覆盖构件。
[0018]
第一部分和第二部分可以经由一个或更多个弹性元件的相关弹性部分弹性连接,该相关弹性部分被布置成弹性变形。第一部分和第二部分可以形成弹性元件的更刚性的部分,例如响应于第一透明覆盖构件和致动器位移元件之间的相对径向位移而不变形或变形较少的部分。因此,第一部分和第二部分可以在弹性方面区别于弹性元件的弹性部分,比如抵抗第一透明覆盖构件和致动器位移元件之间的相对径向位移的较低弹性(高刚度)。
[0019]
根据一个实施例,弹性元件的第一部分在沿着环绕光轴的路径分布的分离位置处连接到第一覆盖构件。
[0020]
例如,一个或更多个致动器可以被布置成沿着环绕第一覆盖构件的光轴的路径产生力,以便产生第一覆盖构件和/或第二覆盖构件的曲率的可控变化。
[0021]
根据一个实施例,每个弹性元件在径向方向上具有第一弹簧常数,并且在光轴的方向上具有第二弹簧常数,其中,第一弹簧常数小于第二弹簧常数。
[0022]
根据一个实施例,可控透镜包括将致动器位移元件与第二覆盖构件连接的一个或更多个其他弹性元件。
[0023]
因此,可控透镜可以包括第一弹性元件和第二弹性元件,第一弹性元件和第二弹性元件被定位成使得它们分别面向第一覆盖构件和第二覆盖构件。
[0024]
根据一个实施例,每个弹性元件包括弹性粘合剂。替代地或附加地,弹性元件包括非金属材料或粘弹性材料,弹性粘合剂是其中一个示例。
[0025]
有利地,胶或粘合剂可以用作弹性部件或与其他类型的弹性部件(比如弹性铰链、挠曲结构和其他弹簧元件)组合使用。
[0026]
根据一个实施例,每个弹性元件包括一个或更多个弹簧元件,其中,每个弹簧元件
包括第一部分。
[0027]
根据一个实施例,每个弹性元件包括支撑构件,其中,支撑构件包括第二部分。支撑构件可以被布置为用于多个位移元件和/或用于一个或更多个弹性元件中的每一个的多个弹性部分的公共支撑。
[0028]
因此,支撑构件(比如力分配支撑构件)可以与多个位移元件和/或与多个弹性部分(比如弹簧元件)连接。根据一个实施例,弹簧元件中的每一个被构造为单独的弹簧元件。因此,每个弹簧元件能够独立于其他弹簧元件变形。
[0029]
根据一个实施例,与弹簧元件相比,支撑构件被定位成在径向上更靠近光轴。
[0030]
根据一个实施例,可控透镜包括将致动器位移元件与第一覆盖构件连接的第一弹性元件和/或将其他致动器位移元件与第二覆盖构件连接的第二弹性元件。
[0031]
根据一个实施例,每个弹性元件包括一个或更多个弹簧元件以及连接到第一部分和/或第二部分的弹性材料(比如弹性粘合剂)。
[0032]
有利地,弹簧元件与其他弹性材料的组合可以提高弹性元件的能力,以响应于径向方向上的变形并且响应于旋转(比如围绕与透镜的圆周相切的轴线的旋转)而提供低刚度,同时在致动器位移元件的位移方向(例如沿着光轴)上提供高刚度。
[0033]
本发明的第二方面涉及一种包括根据第一方面所述的可控透镜的电子装置。例如,该电子装置可以是照相机模块或说明书中所列出的其他装置。
[0034]
该电子装置包括控制系统,该控制系统用于为一个或更多个致动器供电并且控制该一个或更多个致动器,以便产生透镜的光焦度的可控变化。控制系统可以被配置成在透镜的预定光焦度之间转换。控制系统可以包括电子电路和/或数字处理器,该电子电路和/或数字处理器被布置用于产生控制信号或功率信号,可选地用于获得用于确定控制信号或功率信号的测量数据,并且用于基于测量数据和参考值(比如透镜的期望光焦度)使用前馈控制算法或反馈控制算法来控制致动器。
[0035]
本发明的第三方面涉及将根据第一方面所述的可控透镜用于成像、投射光、光束扫描、光检测和其他目的。
[0036]
一般来说,本发明的各个方面和实施例可以在本发明的范围内以任何可能的方式组合和耦合。本发明的这些和其它方面、特征和/或优势将参考下文描述的实施例进行阐明并且从其中变得显而易见。
附图说明
[0037]
将参考附图仅通过示例的方式描述本发明的实施例,在附图中
[0038]
图1a-1b示出了可控可变焦距的透镜,
[0039]
图2a示出了可变透镜的弹性元件之一的变形能力,
[0040]
图2b示出了基于滑动接触的致动器和第一覆盖构件之间的接触的替代解决方案,
[0041]
图3a-3c示出了弹性元件的第一示例,
[0042]
图4a-4d示出了弹性元件的第二示例,
[0043]
图5示出了包括可变透镜的电子装置,
[0044]
图6a-6c示出了基于弹性铰链结构的弹性元件的第三示例,
[0045]
图7示出了弹簧元件的另一个示例,以及
[0046]
图8示出了弹性元件的主要要求。
具体实施方式
[0047]
图1a和图1b示出了可控可变焦距透镜100的侧视图和俯视图。
[0048]
透镜100包括第一覆盖构件111和第二覆盖构件112。第一覆盖构件和第二覆盖构件中的至少一个被配置成通过由致动器提供的力而弯曲。在一个示例中,第一覆盖构件111和第二覆盖构件112都是透明覆盖构件,例如由玻璃或塑料制成。
[0049]
代替两个透明覆盖构件111、112,第一覆盖构件和第二覆盖构件中的任何一个可以是反射性的,例如设置有反射性金属层,以提供完全反射或部分反射,使得入射光束被反射回到相对的透明覆盖构件。为了方便起见,本文的示例和实施例指的是透明覆盖构件111、112。
[0050]
透镜100包括夹置在第一透明覆盖构件111和第二透明覆盖构件112之间的透明的、可变形的非流体本体105。非流体本体205邻接第一覆盖构件111和第二覆盖构件112的面向内的表面。
[0051]
第一透明覆盖构件111和第二透明覆盖构件112以及非流体本体105构成透镜,该透镜具有与第一透明覆盖构件和第二透明覆盖构件以及非流体本体相交的光轴150。光轴可以被定义为穿过第一透明覆盖构件111和第二透明覆盖构件112以及非流体本体105的中心并且垂直于覆盖构件之一的平面的轴线,光轴可以根据传统的光学定义来定义。
[0052]
透明的、可变形的非流体透镜本体105优选由弹性材料制成。因为透镜本体是非流体的,所以不需要流体密封的外壳来封装透镜本体以防止其泄漏。在优选实施例中,透镜本体由软的聚合物制成,该软的聚合物可以包括多种不同的材料,比如硅酮、聚合物凝胶、交联或部分交联的聚合物的聚合物网络、以及可混溶的油或油的组合。非流体透镜本体的弹性模量可以大于300pa,从而避免在正常操作中由于重力而引起的变形。非流体透镜本体的折射率可以大于1.3。非流体本体205可以具有与第一覆盖构件111和第二覆盖构件112的折射率相等、基本相等或接近的折射率,以便减少在非流体本体105的边界处的反射。
[0053]
透明覆盖构件111、112可以由大量不同的材料制成,比如丙烯酸树脂、聚烯烃、聚酯、硅树脂、聚氨酯、玻璃等。第一覆盖构件111和第二覆盖构件112中的至少一个被布置成通过致动器变形,所述第一覆盖构件111和第二覆盖构件112中的至少一个具有适于通过致动器121的致动而能够弯曲的刚度。一般来说,第一覆盖构件111和/或第二覆盖构件112的材料可以由杨氏模量范围在5mpa和100gpa之间的材料形成,以提供必要的刚度。例如,硼硅酸盐玻璃的杨氏模量为63gpa,而熔融石英玻璃的杨氏模量为72gpa。
[0054]
第一覆盖构件111和/或第二覆盖构件112的弯曲至少部分是由于来自透镜本体105的径向变化的反作用力引起的,该反作用力影响覆盖构件111、112的垂度,并且因此影响光焦度,而不是仅仅竖直地压缩透镜本体而不改变垂度。在wo2019002524a1中描述了透镜本体105对覆盖构件的曲率的影响的全面解释,该文献通过引用并入本文。
[0055]
透镜100进一步包括一个或更多个致动器121,该一个或更多个致动器包括多个致动器位移元件122,这些致动器位移元件被布置成在与光轴150平行或基本平行的方向上移位。
[0056]
一个或更多个致动器121被布置成沿着环绕光轴150的路径151(比如第一覆盖构
件111或第二覆盖构件112的表面上的圆)在第一覆盖构件111或第二覆盖构件112上产生力。一个或更多个致动器可以被布置成使得位移元件作用在如图所示的面向外的表面上,或者作用在第一覆盖构件111和第二覆盖构件112中的一个或两个的面向内的表面上。
[0057]
例如,致动器121可以是线性位移致动器,比如线性压电马达或线性电磁马达、压电致动的悬臂致动器、形状记忆合金、线性螺旋驱动器或线性音圈致动器,所述线性位移致动器被布置成沿着路径151在若干个点(这里示出了八个点)处施加位移。
[0058]
在一个示例中,弹性元件130被配置为环绕光轴的胶环或胶环形体,例如沿着路径151布置。力分配环(比如金属环或由其它足够硬的材料制成以使环在轴向方向上不会弯曲或基本上不会弯曲的环)布置在圆形胶环的顶部上。力分配环可以由支撑构件302(参见别处对支撑构件的描述)来体现。两个或更多个位移元件(由一个或更多个致动器致动)被布置成使力分配环在轴向方向上移位,以便引起第一覆盖构件或第二覆盖构件的弯曲。在该示例中,由弹性胶形成的环形弹性元件130在轴向方向上可以具有在0.05mm至0.2mm范围内的厚度,比如厚度为0.1mm,并且可以具有在0.1mm至0.5mm范围内的环形体的宽度(内半径和外半径之间的差,即环厚度),比如环形体的宽度为0.2mm。当胶固化或硬化时,从杨氏模量来看,胶的硬度可以在2到200mpa范围内,比如胶的硬度为25mpa。
[0059]
在一个示例中,致动器固定到固定支撑件190上,使得位移元件122相对于支撑件190移位。类似地,未致动的覆盖构件,比如如图2a-2b所示的第二覆盖构件112,可以由固定支撑件190支撑,除非第二覆盖构件112由其他致动器121的其他致动器位移元件122致动。
[0060]
在将一个或更多个致动器布置成作用在第一覆盖构件111和第二覆盖构件112的面向内的表面上的示例中,致动器121可以经由弹性元件连接到覆盖构件中的一个,而位移元件122经由弹性元件连接到相对的覆盖构件。以这种方式,致动器的位移将导致两个覆盖构件的弯曲。替代地,致动器121(即被配置成固定的部分)被固定到固定支撑件190上,而位移元件122连接到第一覆盖构件111和第二覆盖构件112之一的面向内的表面上。未连接到位移元件的另一个覆盖构件可以连接到固定支撑件190。
[0061]
致动器可以布置在第一覆盖构件111和第二覆盖构件112之间,即仅夹置在第一覆盖构件111和第二覆盖构件112之间。
[0062]
路径151可以环绕透明的、可变形的非流体本体205,使得非流体本体205被路径151包围,如图所示。然而,路径151还可以位于非流体本体205的延伸范围内。致动器121还可以定位成使得它们作用在第一覆盖构件111或第二覆盖构件112的边缘上,或者定位成靠近该边缘。
[0063]
致动器121被布置成在与覆盖构件111、112的表面垂直或基本垂直的方向上沿着路径151产生位移。在这种情况下,基本上垂直可能意味着相对于法线的偏差高达例如10-15度。线性位移的方向和覆盖构件的表面之间的角度的角度变化根据覆盖构件的弯曲而产生。
[0064]
如下文更详细描述的,致动器的动作根据致动器所提供的力、扭矩或位移来改变第一覆盖构件和/或第二覆盖构件的曲率。因此,通过控制致动器,可以控制透镜100的弯曲和由此的光焦度。如果致动器被布置成与第一覆盖构件连接,则第二覆盖构件也可以弯曲,反之亦然,这取决于覆盖构件的厚度或刚度。还可能的是,致动器被布置成与第一覆盖构件111连接,但是第一覆盖构件111具有高刚度,使得主要是第二覆盖构件112由于致动器作用
在第一覆盖构件111上的位移而弯曲。在这种情况下,第二覆盖构件112可以由固定支撑件190支撑。
[0065]
注意,致动器121可以被布置成作用在第一覆盖构件111或第二覆盖构件112上。还可能的是,致动器121被布置成作用在第一覆盖构件121和第二覆盖构件122上,使得两个覆盖构件通过致动器121的作用而被迫弯曲,可能使得两侧的致动器可以独立控制,即,使得施加在其中一个覆盖构件上的位移/力独立于施加在另一个覆盖构件上的位移/力。
[0066]
致动器121的致动器位移元件122经由弹性元件130连接到第一透明覆盖构件111。
[0067]
弹性元件130响应于第一透明覆盖构件111和致动器位移元件122之间的相对位移而弹性变形。
[0068]
根据一个实施例,弹性元件130包括弹性材料,比如弹性粘合剂。因此,覆盖构件121、122和致动器位移元件122中的每一个之间的弹性连接可以通过执行胶合过程来实现,例如通过施加特定体积的粘合剂,并且通过确保在粘合剂的固化期间保持致动器位移元件122和覆盖构件111、112之间的特定距离和取向。
[0069]
例如,由将单个致动器位移元件122与覆盖构件121、122中的一个连接的弹性胶制成的单个弹性元件130可以形成为柱形(例如桶形)元件,并且该单个弹性元件在轴向方向(沿着光轴)上具有的厚度在0.01mm至1mm的范围内,并且垂直于轴向方向(即,在径向方向上)的宽度或半径在0.02mm至2mm的范围内。从杨氏模量来看,胶的硬度可以在2到200mpa范围内,比如25mpa。
[0070]
一般来说,弹性胶连接可以具有0.01-5.00mm范围内的厚度、0.02-2.00mm的径向方向上的宽度,并且该弹性胶连接由杨氏模量在1-1000mpa范围内的胶制成。
[0071]
图2a示出了弹性元件130之一的变形能力。固定的xyz坐标系是相对于弹性元件130的初始位置定义的,例如当弹性元件130处于非变形状态时。在该示例中,z轴平行于光轴150。
[0072]
在左边的图示中,第一覆盖构件111具有初始曲率,这可能是由于预成形曲率或由于致动器位移元件122的初始位移引起的。第一覆盖构件111上的接触点281在弹性元件130和第一覆盖构件111之间的界面处具有xz坐标x0,z0。
[0073]
在右边的图示中,致动器121已经被控制以使致动器位移元件122沿着z轴移动或延伸距离δl1。该位移产生第一覆盖构件111的弯曲或附加弯曲,使得接触点281由于接触点281朝向光轴的径向位移(即沿着局部xyz坐标系的x轴的位移)以及由于沿着z轴的位移而从x0,z0移动到x1,z1。
[0074]
由于第一透明构件111的弯曲,弹性元件130和第一覆盖构件111之间的界面处的表面围绕y轴旋转,即通常围绕与环绕光轴150的路径151相切的轴线旋转。
[0075]
如图所示,弹性元件130被配置成响应于第一透明覆盖构件111构件和致动器位移元件122之间的相对径向位移而在径向方向上(这里是沿着x轴)弹性变形。
[0076]
此外,弹性元件130被配置成响应于围绕y轴或切线轴作用的扭矩ty而弹性变形。扭矩ty是由于第一透明构件111的弯曲而产生的,该弯曲包括围绕y轴的旋转,或者所述扭矩通常是由于第一透明覆盖构件和致动器位移元件之间的相对位移而产生的。
[0077]
优选地,弹性元件130响应于径向方向上的变形并且响应于旋转(比如围绕切线轴的旋转,该切线轴在这里是y轴)而具有低刚度。优选低刚度,以便允许第一透明构件111弯
曲而不暴露于表面应力,该表面应力可能会不适当地影响第一透明构件的曲率,使得修改的曲率导致波前误差增加。不期望的应力可能是由于例如来自弹性元件130的沿着径向方向并且围绕切线轴或y轴作用的力和扭矩而引起的。
[0078]
另一方面,优选的是,弹性元件在致动器位移元件122的位移方向上(即沿着z轴或沿着光轴150)具有高刚度,以便将致动器位移传递到覆盖构件。
[0079]
因此,根据一个实施例,弹性元件在径向方向上具有第一弹簧常数k1,并且在光轴150的方向上具有第二弹簧常数k2,其中,第一弹簧常数k1大于第二弹簧常数k2。
[0080]
下表给出了与所产生的光焦度以及第一透明覆盖构件111或第二透明覆盖构件112的直径相关的变形的尺寸的示例。所述直径可以被指定为直径相对的致动器位移元件122之间的距离。弯曲高度指定的是从曲形的覆盖构件111、112的顶点到未变形的覆盖构件的距离。
[0081][0082]
因此,表格值给出了弹性元件130的径向变形和旋转变形的示例。
[0083]
弹性元件130可以被定义为具有固定到第一透明覆盖构件或第二透明覆盖构件上的第一部分201(例如,图2a中接触覆盖构件111的表面)和固定到致动器位移元件上的第二部分202(例如,图2a中接触致动器位移元件122的表面)的结构。第一部分201和第二部分202弹性连接,使得它们能够相对于彼此弹性移位,例如在朝向光轴的径向方向上。弹性元件130可以由诸如硅胶、聚合物、金属、塑料和其他材料等弹性材料整体制造。
[0084]
如图1b和本文的其他示例所示,弹性元件130的第一部分201在沿着环绕光轴的路径分布的分离位置处连接到第一透明覆盖构件。
[0085]
一般来说,一个或更多个弹性元件130应被配置成允许在给定位置(即致动器位移元件122的位置)处的径向变形,该径向变形独立于或基本上独立于其他位置处的其他弹性元件130的变形。因此,一个或更多个弹性元件130的至少一部分(比如第一部分201)应被布置成在其它位置处独立于或基本上独立于第一部分201移位。显然,如图1a所示,在将单个弹性元件130用于每个致动器位移元件122时,可以实现这一点。然而,当弹性元件130配置有多个可变形部分(比如多个第一部分201)时,也可以实现这一目标,所述多个可变形部分没有单独地且独立地连接到对应的多个致动器位移元件122。
[0086]
图2b示出了用于避免在第一覆盖构件111或第二覆盖构件112中产生应力的替代解决方案。根据该替代解决方案,可控透镜100配置有滑动接触件239,而不是弹性元件130。
[0087]
滑动接触件239可以通过致动器位移元件122和第一覆盖构件111或第二覆盖构件112之间的低摩擦接触来体现。低摩擦接触可以通过成对的低摩擦材料来实现,例如致动器
位移元件122的接触部分的材料,该材料相对于第一覆盖构件111或第二覆盖构件112的表面提供低摩擦或足够低的摩擦。示例包括聚乙烯和其他塑料材料。因此,滑动接触件239不需要由单独的元件构成,而是可以由致动器位移元件122和第一覆盖构件111或第二覆盖构件112之间的直接接触构成。替代地,滑动接触件可以由附接到致动器位移元件122的端部上的低摩擦材料来体现。
[0088]
滑动接触件304被配置成当覆盖构件由于致动器位移元件122沿着z轴的位移δl1而弯曲时,使滑动接触件239能够在第一覆盖构件111和第二覆盖构件112的表面上方滑动。在该示例中,该位移产生第一覆盖构件111的弯曲或附加弯曲,使得接触点281由于接触点281朝向光轴的径向位移(即沿着局部xyz坐标系的x轴的位移)以及由于沿着z轴的位移而从x0,z0移动到x1,z1。在弯曲过程中,滑动接触件239在覆盖构件的表面上方滑动,如图2b所示。
[0089]
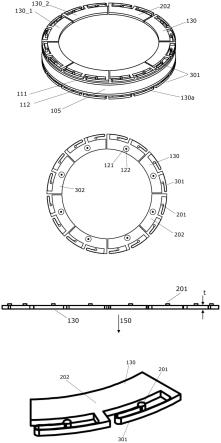
图3a-3c示出了弹性元件130的示例,该弹性元件配置有多个弹簧元件301形式的多个可变形部分。
[0090]
弹簧元件301包括第一部分201。例如,第一部分201可以由表示弹簧元件的悬臂结构的端面来体现。响应于第一覆盖构件111或第二覆盖构件112的弯曲,悬臂结构弯曲。悬臂结构的弯曲包括悬臂朝向光轴的倾斜和悬臂的旋转的组合。因此,悬臂弹簧301的弯曲助于弹性元件130响应于径向方向上的变形而提供低刚度以及响应于旋转(比如围绕切线轴或y轴的旋转)而提供低刚度的要求。
[0091]
弹簧元件301中的每一个与相邻的弹簧元件分开,以使弹簧元件301的每一个能够独立于或基本上独立于相邻的弹簧元件301变形。因此,弹簧元件被构造为单独的弹簧元件。
[0092]
弹性元件包括支撑构件302。如主要示出的,致动器位移元件122被布置成作用在支撑构件302的表面上。因此,支撑构件302包括第二部分202,并且该支撑构件被配置为用于多个位移元件122的公共支撑,即多个位移元件122被布置成共同作用在支撑构件302上,即,使得位移元件122的位移被共同传递到支撑构件。
[0093]
替代地或附加地,包括第二部分202的支撑构件302被配置为用于多个弹簧元件301或通常用于弹性元件130的多个弹性部分(比如弹性粘合部分)的公共支撑,多个弹簧元件301或弹性部分被布置成共同作用在支撑构件302上,即多个弹簧元件301或弹性部分共同连接到支撑构件302,即,使得弹簧元件301或弹性部分的反作用力被共同传递到支撑构件。
[0094]
在该示例中,第二部分202构成弹性元件130的更刚性的部分,即至少具有比弹性元件130的弹性部分的径向弹性系数k1更高的弹性系数的部分,比如端部部分。类似地,第一部分201也可以构成弹性元件130的更刚性的部分。
[0095]
在该示例中,支撑构件302形成为环形结构,其具有构成透镜100的穿孔的孔口。
[0096]
图3a-3c中的弹性元件130可以整体形成。在另一个示例中,弹簧元件301由不同于支撑构件的材料制成。
[0097]
在该示例中,第一覆盖构件111和第二覆盖构件112各自经由上部第一弹性元件130和下部第二弹性元件130a独立地被致动。
[0098]
图4a-4d示出了配置有多个弹簧元件301的弹性元件130的另一个示例。
[0099]
如图4b和4d所示,弹簧元件301形成为u形元件。弹簧元件301的端部部分包括第一部分201。
[0100]
弹簧元件301的u形设计允许接触点(即第一部分201)的径向移动以及y轴倾斜(参见图2)。弹簧元件301的横截面厚度可以从第一部分201到第二部分202变化,以实现第一弹簧常数k1和第二弹簧常数k2的期望特性。由于弹簧元件301在光轴150的方向上的厚度t(图4c),光轴方向上的弹簧常数k2可以大于径向方向上的弹簧常数k1。此外,围绕y轴的扭转弹簧常数(参见图2)可以相对于第二弹簧常数k2足够低。
[0101]
支撑覆盖构件111、112的第一部分201的非对称设计和偏心位置有利于y轴倾斜。也就是说,当第一部分201经受压力时,非对称设计支持由于覆盖构件111、112的弯曲而引起的倾斜。
[0102]
图4c示出了弹性元件130形成为扁平结构,其中包括第一部分201的端部部分向外突出,使得第一部分201在光轴150的方向上远离弹性元件130的其他部分。由于突出的第一部分201,第一覆盖构件111和/或第二覆盖构件112可以连接到第一部分201,同时覆盖构件和弹性元件130之间的间隙由突出的第一部分提供。
[0103]
特别地,由弹簧301的突出部分(比如突出的第一部分201)提供的间隙允许覆盖构件111、112弯曲,同时仍然确保覆盖构件和支撑构件302的内周边之间的间隙,其中最小间隙出现在覆盖构件的最大尺寸处。
[0104]
同样在该示例中,弹簧元件301被构造为单独的弹簧元件。
[0105]
在该示例中,多个弹性元件130_1、130_2被布置成使得多个弹性元件130_1、130_2的内周边形成构成透镜100的穿孔的孔口。
[0106]
在该示例中,每个弹性元件130包括两个弹簧301,尽管每个弹性元件130可以具有一个或更多个弹簧301并且例如被配置成使得单个弹性元件130形成构成透镜100的穿孔的孔口,如图3a-3c所示。
[0107]
类似地,对于图3a-3c,每个弹性元件130包括支撑构件302。致动器位移元件122经由弹性元件130的第二部分202连接到支撑构件302。
[0108]
因此,在该示例中,支撑构件302中的每一个被配置为用于多个弹簧元件301或用于弹性元件130的弹性部分的公共支撑。如图所示,位移元件122与支撑构件302一对一地连接,但是支撑构件302中的每一个可以替代地被配置为用于多个位移元件的公共支撑。
[0109]
图4a-4d和其他设计中的支撑构件130可以通过注射模制、通过3d打印或通过其他方法整体形成为例如mems结构。
[0110]
与弹簧元件301相比,弹性元件130的构成支撑构件302的部分定位成在径向上更靠近光轴150。
[0111]
图3a-3c和图4a-4d中的弹性元件130可以被配置成使得除了一个或更多个弹簧元件301之外,弹性元件130还包括连接到第一部分201和/或第二部分202的弹性材料(比如弹性粘合剂),使得第一部分201经由粘合剂固定到致动器位移元件122上和/或使得第二部分202固定到第一覆盖构件111或第二覆盖构件112上。为了使第一部分201和/或第二部分202分别与位移元件122和覆盖构件111、112连接而提供的弹簧元件301和弹性材料(比如粘合剂)的组合可以有利地提高弹性元件130响应于覆盖构件111、112的弯曲而变形的能力,从而减少覆盖构件中应力的产生。
[0112]
图6a-6c示出了弹性元件130的替代配置。图6a示出了弹性元件130包括环形结构,该环形结构包括第二部分202。图6a-6b仅主要示出了致动器位移元件122固定到第二部分。弹性元件包括多个弹簧元件301,这些弹簧元件被配置为铰链结构。弹簧元件经由其第一部分101固定到第一覆盖构件111上。
[0113]
图6c示出了铰链结构601、602的可能配置,其通过沿着限定铰链轴的方向产生薄的厚度而形成。所示的xyz坐标系是相对于表面202a定义的,该表面在此经由环结构固定到第二部分202上。
[0114]
因此,弹簧元件301包括第一铰链结构601,该第一铰链结构限定旋转轴,该旋转轴使得能够围绕y轴旋转或围绕与环绕光轴150的路径151相切的轴线旋转。因此,第一铰链结构601支撑第一透明覆盖构件111和致动器位移元件122之间围绕y轴的相对旋转。换句话说,第一铰链结构被布置成响应于由第一透明覆盖构件和致动器位移元件之间的相对位移产生的围绕y轴的扭矩ty而弹性变形。
[0115]
弹簧元件301进一步包括第二铰链结构602,该第二铰链结构限定旋转轴,该旋转轴使得能够围绕z轴旋转并且由此支撑。由于弹簧元件301沿着y轴、z轴旋转的延伸,第二铰链结构602产生径向运动并且因此支持第一透明覆盖构件111和致动器位移元件122之间的相对径向位移。
[0116]
第一铰链结构601和第二铰链结构602的旋转刚度取决于材料刚度,并且因此根据需要进行设计,但是显然具有下限。类似地,通过将第一铰链结构601和第二铰链结构602设计成沿着铰链轴具有足够高的长度,可以将铰链结构设计成在z轴方向上具有高刚度。
[0117]
有利地,由第一铰链结构601和第二铰链结构602提供的y轴和z轴的旋转提供了去耦旋转。
[0118]
图7示出了具有第一铰链结构601和第二铰链结构602的替代弹簧结构301,其与图6c等效,但是处于沿着z轴实现降低高度的配置中。图7和图6c中的两个第二铰链结构602允许弹簧元件301的第一部分201径向移位,即在x方向上移位,而不围绕z轴旋转。
[0119]
图8总结了对弹性元件130的要求。因此,左侧的图示说明了弹性元件130或弹性元件的一部分(包括弹簧元件301)处于致动器121不产生力的状态,即f=0。因此,第一覆盖构件111处于其曲率没有被致动器改变的状态。
[0120]
在右侧的图示中,致动器位移元件已经被激活,以引起δl1的z轴位移。由于至少部分由第一覆盖构件111的弯曲引起的反作用力,z轴位移在z方向上产生非零平衡力f1(即,在覆盖构件的静止弯曲状态下)。由致动器121产生的z轴位移导致第一覆盖构件111弯曲,如放大显示的。除了z轴位移δl1之外,弯曲还导致了第一部分201沿着x轴的径向位移和第一部分201围绕y轴的旋转。本文描述的弹性元件130的不同示例对致动器位移元件122的位移提供了相同的响应,即径向位移和旋转,以支撑第一覆盖构件111或第二覆盖构件的弯曲。
[0121]
图5示出了电子装置500的剖视图,该电子装置比如为智能手机、平板电脑或笔记本电脑或其他装置的一部分。装置500可以包括照相机模块501,该照相机模块被布置用于将经由穿孔502接收的光成像到图像传感器上。可控透镜100形成照相机模块501和可选的其他透镜以及图像传感器的一部分。电子装置500的示例包括便携式计算机、智能手机、手表、平板电脑、照相机、具有可变透镜的眼镜、被布置用于扫描距离的测量装置、被布置用于
通过扫描光束创建图像的图像投影仪。因此,透镜100可以用于各种目的,比如成像、光和图像投影、光束扫描、光检测激光雷达扫描等。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1