一种基于压电电机调节的大视场高分辨率激光扫描系统
1.本发明涉及激光扫描技术领域,更具体地说是涉及一种基于压电电机调节的大视场高分辨率激光扫描系统。
背景技术:
2.激光扫描技术可用于快速获取物体表面的三维信息,已广泛应用于工业制造、地形绘制、光电医疗等领域。随着测量需求的扩展,被测物的复杂程度不断增加,对激光扫描系统的分辨力和视场角提出了更高的要求。mems振镜作为激光扫描系统的核心部件,可以通过快轴的高频谐振运动与慢轴的低频受迫振动将测量光束反射至被测空间实现三维扫描。然而为了获得高分辨力与大视场的扫描结果,需要在提高快轴的谐振频率的情况下保证振镜逐行扫描的均匀性,同时驱动电路提供更大的驱动力增加振镜的机械转角。这增加了mems振镜反射面畸变及断裂的风险,且在实际应用中难以实现。
技术实现要素:
3.本发明是为避免上述现有技术所存在的不足,提供一种基于压电电机调节的大视场高分辨率激光扫描系统,在不改变mems振镜扫描频率的情况下增大探测视场角,提高系统分辨力和扫描范围,降低控制难度。
4.为实现上述目的,本发明采用如下技术方案:
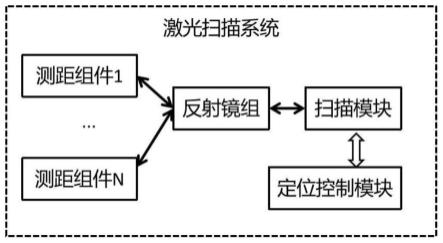
5.本发明基于压电电机调节的大视场高分辨率激光扫描系统,其特点是所述系统包括:由n个测距组件构成的测距模块、反射镜组、扫描模块和定位控制模块;
6.所述测距模块,用于发射和接收测量激光光束,以实现距离测量;
7.所述反射镜组,用于反射各测距组件发射的测量光束,将其以设定角度入射至扫描模块;
8.所述扫描模块,其为二维mems振镜,用于将测量光束反射至待测空间进行二维扫描;
9.所述定位控制模块由压电电机、驱动器和定位组件构成;将所述二维mems振镜与所述定位组件固定安装,由所述压电电机控制定位组件调整二维mems振镜的空间位置,实现激光扫描系统分辨率倍增与视场角扩展。
10.本发明基于压电电机调节的大视场高分辨率激光扫描系统的特点也在于:所述定位组件是由运动导轨、柔性铰链或蜗轮蜗杆机构构成的回转件,具有回转轴、回转面,以及回转面上的回转中心;设置所述二维mems振镜的反射面中心与定位组件的回转中心同心,二维mems振镜的慢轴方向与定位组件的回转轴所成夹角γ不大于45
°
。
11.本发明基于压电电机调节的大视场高分辨率激光扫描系统的特点也在于:所述定位组件绕其回转轴的转动角度δ为:δ《α-β/2,其中,α为测距组件发射的测量激光光束与二维mems振镜快轴方向的最小夹角,β为二维mems振镜的快轴振动方向的最大机械转角。
12.本发明基于压电电机调节的大视场高分辨率激光扫描系统的特点也在于:以距离
二维mems振镜反射面中心l位置处为原点o,以平行于振镜快轴方向为x轴,以平行于振镜慢轴方向为y轴方向,建立坐标系xoy,针对距离l处的被测对象,每个测距组件的测量点的坐标值(x,y)为:
[0013][0014][0015]
由定位控制模块根据振镜快慢轴的偏转角度实时调整定位组件绕其回转轴的转动角度δ,用于补偿振镜水平扫描时的枕形失真,调整后的快轴方向扫描角度d
x
为:
[0016][0017]
其中:
[0018]
ε为所述测距组件的测量激光光束与振镜反射面法线的夹角;
[0019]
i为mems振镜快轴振动方向机械转角,j为mems振镜慢轴振动方向机械转角;
[0020]
δ为定位组件绕其回转轴的转动角度。
[0021]
本发明基于压电电机调节的大视场高分辨率激光扫描系统的特点也在于:定义:由压电电机控制定位组件所实现的最小位移分辨率为δ,压电电机对定位组件进行回转驱动的回转半径为l;则,由定位组件对二维mems振镜的快轴振动方向所实现的最小角度分辨力θ为:θ=δ/l。
[0022]
本发明基于压电电机调节的大视场高分辨率激光扫描系统的特点也在于:所述的n个测距组件以m
×
p的矩阵形式分布,且m≥2,p≥1,同一行中m个测距组件发射的测量光束经反射镜组反射后以相同的角度间隔入射至二维mems振镜反射面中心,以m
×
p的测距组件实现待测空间m
×
p个矩形区域的扫描测量。
[0023]
本发明基于压电电机调节的大视场高分辨率激光扫描系统的特点也在于:设置所述激光扫描系统的工作模式为:常规均匀扫描模式m1、大视场扫描模式m2或高分辨率集中扫描模式m3;
[0024]
所述常规均匀扫描模式m1是指:在不改变定位组件初始位置的情况下,对当前测量区域以系统初始分辨率h1及系统初始视场角h2进行均匀扫描;所述系统初始分辨率h1及系统初始视场角h2由所述测距组件、反射镜组以及扫描模块的安装位置决定;
[0025]
所述大视场扫描模式m2是指:在常规均匀扫描模式m1的基础上,通过压电电机对定位组件的位置进行调整,扩大系统的扫描视场;所述大视场扫描模式m2按如下步骤进行:
[0026]
步骤a、按常规均匀扫描模式m1进行测量,获得基础测量数据;
[0027]
步骤b、根据所需测量的扩大区域的位置数据,启用与所述扩大区域相邻近的测距组件按步骤c进行测量;
[0028]
步骤c、根据系统在大视场扫描模式m2下设置的视场角计算获得扫描模块需要转动的角度值,依据所述扫描模块需要转动的角度值计算获得由压电电机驱动的定位组件所需调整的距离值,在由压电电机对定位组件完成驱动及定位后,由所述与扩大区域相邻近的测距组件完成扫描测量,获得视场角调整后的测量数据;
[0029]
步骤d、对所述基础测量数据和视场角调整后的测量数据进行点云拼接,获得大视场扫描测量结果。
[0030]
所述高分辨率集中扫描模式m3是指:在常规均匀扫描模式m1或大视场扫描模式m2的基础上,通过压电电机控制定位组件实现的高分辨率扫描,以提高区域测量密度;所述高分辨率集中扫描模式m3按如下步骤进行:
[0031]
步骤1、根据所需集中扫描的集中区域的位置数据,启用与所述集中区域相对应的测距组件按步骤2进行测量;
[0032]
步骤2、根据设定的分辨率计算获得扫描模块单次转动的角度值,依据所述扫描模块单次转动的角度值计算获得压电电机驱动定位组件完成单次转动的转动距离,在由压电电机对定位组件完成驱动及定位后,由所述与集中区域相对应的测距组件完成测量;
[0033]
步骤3、重复步骤2,由测距组件完成k-1次定位控制后的扫描测量,k为角度分辨率提升的倍数,实现集中区域内设定分辨率下的关于定位控制和扫描测量的多组测量数据;
[0034]
步骤4、对所述多组测量数据进行点云拼接,获得集中区域的高分辨率扫描测量结果。
[0035]
本发明基于压电电机调节的大视场高分辨率激光扫描系统的特点也在于:所述压电电机以其驱动足对所述定位组件施加预压力,设置压电电机为ac模式、gate模式、或为dc模式的工作模式;
[0036]
采用ac工作模式用于对定位组件进行毫米级的运动控制;
[0037]
采用gate工作模式用于对定位组件进行微米量级的运动控制;
[0038]
采用dc工作模式用于对定位组件进行纳米级定位控制及电机状态的锁定;
[0039]
本发明基于压电电机调节的大视场高分辨率激光扫描系统的特点也在于:所述驱动器根据设定的扫描系统分辨率及视场角采用基于bp神经网络的pid控制算法动态调整驱动电压,用于驱动所述压电电机实现快速控制,提高系统完成高分辨率测量的速度。
[0040]
与已有技术相比,本发明有益效果体现在:
[0041]
1、本发明使用压电电机对激光扫描系统中的mems振镜的扫描角度进行精密调整,可以实现数倍于原有系统的高分辨率扫描,降低了对mems振镜逐行扫描均匀性的要求,将对振镜扫描角度均匀性的要求转化为压电电机的定位精度要求,大大降低了控制难度,系统结构紧凑,易于集成。
[0042]
2、本发明可以通过压电电机大幅度调整mems振镜的定位角度,突破mems振镜的偏转角度限制,在不改变mems振镜扫描频率的情况下增大探测视场角,将对振镜大幅度角度偏转的需求转化为压电电机的长行程控制要求,扩展了激光扫描系统的应用场景。
[0043]
3、本发明采用压电电机控制的方式,实现大行程与高分辨力的角度调整范围,突破了mems振镜应用于激光扫描系统中的技术瓶颈,可以显著提高系统分辨力与扫描范围。同时减小系统所需测距组件的数量,大幅简化结构扫描系统的结构,降低安装及调试过程的复杂度。
附图说明
[0044]
图1为本发明基于压电电机调节的高分辨率激光扫描系统构成示意图;
[0045]
图2为本发明中激光扫描系统的扫描成像示意图;
[0046]
图3是本发明中压电电机驱动距离与角度转换关系示意图;
[0047]
图4是本发明中压电电机与定位组件的安装示意图;
[0048]
图5是本发明示出的压电电机定位控制流程图;
具体实施方式
[0049]
本实施例中基于压电电机调节的大视场高分辨率激光扫描系统包括:由n个测距组件构成的测距模块、反射镜组和扫描模块;其特征是在系统中设置定位控制模块。
[0050]
测距模块,用于发射和接收测量激光光束,以实现距离测量;
[0051]
反射镜组,用于反射各测距组件发射的测量光束,将其以设定角度入射至扫描模块;
[0052]
扫描模块,其为二维mems振镜,用于将测量光束反射至待测空间进行二维扫描;
[0053]
定位控制模块由压电电机、驱动器和定位组件构成;将二维mems振镜与定位组件固定安装,由压电电机控制定位组件调整二维mems振镜的空间位置,实现激光扫描系统分辨率倍增与视场角扩展。
[0054]
图1所示为本实施例中基于压电电机调节的高分辨率激光扫描系统构成。系统包括由测距组件1至测距组件n构成的测距模块、与n个测距组件一一对应的反射镜构成反射镜组、扫描模块、定位控制模块;其中扫描模块为二维mems振镜,具有谐振运动状态的快轴与受迫运动状态下的慢轴两个振动轴。扫描模块用于将测量光束反射至待测空间进行二维扫描,并接收由被测物反射回的激光回波光束。
[0055]
定位组件是由运动导轨、柔性铰链或蜗轮蜗杆机构构成的回转件,具有回转轴、回转面,以及回转面上的回转中心;设置二维mems振镜的反射面中心与定位组件的回转中心同心,二维mems振镜的慢轴方向与定位组件的回转轴所成夹角γ不大于45
°
;定位组件绕其回转轴的转动角度δ为:δ《α-β/2,其中,α为测距组件发射的测量激光光束与二维mems振镜快轴方向的最小夹角,β为二维mems振镜的快轴振动方向的最大机械转角。
[0056]
以距离二维mems振镜反射面中心l位置处为原点o,以平行于振镜快轴方向为x轴,以平行于振镜慢轴方向为y轴方向,建立坐标系xoy,针对距离l处的被测对象,每个测距组件的测量点的坐标值(x,y)为:
[0057][0058][0059]
由定位控制模块根据振镜快慢轴的偏转角度实时调整定位组件绕其回转轴的转动角度δ,用于补偿振镜水平扫描时的枕形失真,调整后的快轴方向扫描角度d
x
为:
[0060][0061]
其中:
[0062]
ε为测距组件的测量激光光束与振镜反射面法线的夹角;
[0063]
i为mems振镜快轴振动方向机械转角,j为mems振镜慢轴振动方向机械转角;
[0064]
δ为定位组件绕其回转轴的转动角度。
[0065]
图2所示为本实施例中激光扫描系统扫描成像示意图,测距组件11用于发射经准直后的测量光束,并接收由被测物反射回的激光回波光束。扫描模块选用反射面镀金的二维mems振镜21;测量光束经反射镜组反射后分别以设定角度射入二维mems振镜21的镀金反射面22中心;通过二维mems振镜21的二维振动获取测量区域h内设定角度分辨力的系列测量点100;n个测距组件分别对应n个测量区域;定位控制模块由压电电机33、驱动器32和定位组件31构成;定位组件31采用精密弧形运动导轨构成回转件,可沿其回转轴进行转动,回转轴与二维mems振镜的反射面相交于反射面中心;将二维mems振镜21固定于定位组件31,使mems振镜的慢轴方向与定位组件的回转轴所成的夹角小于45
°
;定位组件31的回转面与mems振镜的快轴方向保持平行,通过定位组件的高精度定位控制提高激光扫描系统的水平向角度分辨力;通过驱动器32的输入电压控制压电电机33进行运动,压电电机33通过驱动足与定位组件31的边缘接触,带动定位组件完成设定角度值的转动;图2所示系列测量点100表征定位组件31静止时系统所能达到的角度分辨力q,系列测量点200表征系统通过对定位组件31进行高精度定位控制后所能达到的角度分辨力;角度分辨力所能提升的倍数a为:其中,为扫描模块引入的角度误差,δ为定位组件31绕回转轴的转动角度。
[0066]
定义:由压电电机控制定位组件所实现的最小位移分辨率为δ,压电电机对定位组件进行回转驱动的回转半径为l;则,由定位组件对二维mems振镜的快轴振动方向所实现的最小角度分辨力θ为:θ=δ/l;图3所示本实施例中压电电机驱动距离与角度转换关系示意图,驱动器32控制压电电机33对定位组件31进行运动控制,压电电机驱动定位组件绕其回转圆周转动距离δ时,定位组件绕其回转轴转动的角度ω=δ/l。同时二维mems振镜固定于定位组件上,且其反射面中心与定位组件的回转中心同心,故定位组件的转动角度θ等于二维mems振镜的快轴振动方向转动的角度值ω。故系统所实现的最小角度分辨力由压电电机控制定位组件所实现的最小位移分辨率决定;本实施例中采用的压电电机具有纳米级定位分辨率,可在dc模式下保持50nm内的漂移,在定位组件回转半径为0.1m的情况下能够实现不大于0.001
°
的角度分辨力。
[0067]
当压电电机驱动定位组件进行大行程运动控制时可实现系统扫描视场角的扩展;通过压电电机驱动定位组件绕其回转轴的转动实现角度偏调整,从而带动mems振镜实现大范围的角度偏转,在不增加测距组件数量的情况下增加系统的扫描视场角,补偿mems振镜快轴在谐振运动下机械转角较小(《
±
7.5
°
)的不足。视场角的扩展倍数为:b=2(β+δ)/β,其中β为扫描模块的快轴的最大机械转角,δ为定位组件31绕回转轴的转动角度。
[0068]
n个测距组件以m
×
p的矩阵形式分布,且m≥2,p≥1,同一行中m个测距组件发射的测量光束经反射镜组反射后以相同的角度间隔入射至二维mems振镜反射面中心,以m
×
p的测距组件实现待测空间m
×
p个矩形区域的扫描测量;系统测量的水平视场角由同一行中m个测距组件的测量光束入射至扫描模块的角度决定,垂直视场角由p个测距组件的测量光束入射至扫描模块的角度决定。
[0069]
设置激光扫描系统的工作模式为:常规均匀扫描模式m1、大视场扫描模式m2或高分辨率集中扫描模式m3;
[0070]
常规均匀扫描模式m1是指:在不改变定位组件初始位置的情况下,对当前测量区
域以系统初始分辨率h1及系统初始视场角h2进行均匀扫描;系统初始分辨率h1及系统初始视场角h2由测距组件、反射镜组以及扫描模块的安装位置决定;
[0071]
大视场扫描模式m2是指:在常规均匀扫描模式m1的基础上,通过压电电机对定位组件的位置进行调整,扩大系统的扫描视场;大视场扫描模式m2按如下步骤进行:
[0072]
步骤a、按常规均匀扫描模式m1进行测量,获得基础测量数据;
[0073]
步骤b、根据所需测量的扩大区域的位置数据,启用与扩大区域相邻近的测距组件按步骤c进行测量;
[0074]
步骤c、根据系统在大视场扫描模式m2下设置的视场角计算获得扫描模块需要转动的角度值,依据扫描模块需要转动的角度值计算获得由压电电机驱动的定位组件所需调整的距离值,在由压电电机对定位组件完成驱动及定位后,由与扩大区域相邻近的测距组件完成扫描测量,获得视场角调整后的测量数据;
[0075]
步骤d、对基础测量数据和视场角调整后的测量数据进行点云拼接,获得大视场扫描测量结果。
[0076]
高分辨率集中扫描模式m3是指:在常规均匀扫描模式m1或大视场扫描模式m2的基础上,通过压电电机控制定位组件实现的高分辨率扫描,以提高区域测量密度;高分辨率集中扫描模式m3按如下步骤进行:
[0077]
步骤1、根据所需集中扫描的集中区域的位置数据,启用与集中区域相对应的测距组件按步骤2进行测量;
[0078]
步骤2、根据设定的分辨率计算获得扫描模块单次转动的角度值,依据扫描模块单次转动的角度值计算获得压电电机驱动定位组件完成单次转动的转动距离,在由压电电机对定位组件完成驱动及定位后,由与集中区域相对应的测距组件完成测量;
[0079]
步骤3、重复步骤2,由测距组件完成k-1次定位控制后的扫描测量,k为角度分辨率提升的倍数,实现集中区域内设定分辨率下的关于定位控制和扫描测量的多组测量数据;
[0080]
步骤4、对多组测量数据进行点云拼接,获得集中区域的高分辨率扫描测量结果。
[0081]
常规均匀扫描模式m1为不使用压电电机驱动定位组件时系统自身的扫描状态。大视场扫描模式m2与高分辨率集中扫描模式m3为根据测量需求进行的定位组件大行程与高分辨率定位控制实现的扫描模式。不同模式之间可以相互转换。通过三种测量模式相结合的方式可以实现大视场范围内的多种测量分辨率要求下的测量需求,降低在大视场需求下对测距组件数量的要求,同时降低对mems振镜扫描性能的要求,在高分辨力测量场景时无需对振镜小角度间隔(《0.1
°
)的重复性进行额外的误差补偿,转而由定位组件的距离分辨率决定扫描系统的角度分辨力,也使系统处理性能的需求进一步降低,利于控制成本。
[0082]
压电电机以其驱动足对定位组件施加预压力,设置压电电机为ac模式、gate模式、或为dc模式的工作模式;
[0083]
采用ac工作模式用于对定位组件进行毫米级的运动控制;
[0084]
采用gate工作模式用于对定位组件进行微米量级的运动控制;
[0085]
采用dc工作模式用于对定位组件进行纳米级定位控制及电机状态的锁定。
[0086]
图4所示为压电电机与定位组件的安装示意图,本实施例中压电电机具有两颗压电陶瓷元件01,每个压电陶瓷元件01表面放置了四组电极,利用超声波激发同时产生伸缩与弯曲两个状态,此两种状态合成为一椭圆形运动轨迹。单个压电陶瓷元件的上表面黏附
四个电极a、a’、b、b’,每个电极为压电陶瓷约1/4的上表面积;压电陶瓷片的下表面覆盖单一电极,电极a和a’相互连接,电极b和b’相互连接。对两组电极a和a’及b和b’施加不同控制电压可使驱动足02产生左右两个方向的移动;压电电机通过驱动足02与定位组件03相接触并施加预压力,由驱动足02带动定位组件03进行定位控制。
[0087]
驱动器根据设定的扫描系统分辨率及视场角采用基于bp神经网络的pid控制算法动态调整驱动电压,用于驱动压电电机实现快速控制,提高系统完成高分辨率测量的速度;神经网络包含输入层、隐藏层和输出层;输入层由e(k-1)-e(k-2)、e(k-1)、e(k-1)-2e(k-2)+e(k-3)三个神经元组成,以神经网络输出层的三个神经元作为pid控制中的kp、ki和kd三个参数调整值。
[0088]
图5所示为本实施例中压电电机定位控制流程图。压电电机具有ac、gate和dc三种模式。采用ac+gate+dc三种模式分阶段控制的策略实现高精度定位控制,以一次控制过程为例,运动全行程由三个阶段组成,第一阶段压电电机运行在ac模式下,此时电机驱动定位组件以平缓的速度运动至目标位移处4um内,此过程时首先对神经网络pid的各个参数进行初始化,若此时导轨运行速度变为零,则进入第二阶段;第二阶段压电电机运行在gate模式,此时导轨以一定的步距慢慢逼近目标位移的50nm处,当导轨速度变为零时压电电机进入第三阶段;第三阶段运行在dc模式下,该模式主要是用来进行导轨最后的锁位,防止导轨由于外界的干扰产生微动,第三阶段根据外界的干扰实时调节此阶段的驱动电压直到本次定位控制结束。
[0089]
尽管已经示出和描述了本发明的实施例,对于本领域的技术人员,可以在不脱离本发明的原理和精神的情况下对实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1