镜头组装系统的制作方法
1.本发明涉及一种镜头组装系统,尤指可对光圈模块进行热压处理、通电处理及组装至镜头模块的镜头组装系统。
背景技术:
2.镜头在使用时需要搭配光圈模块,才能调节进光量。目前的镜头组装产线中,是在光圈模块未通电的情况下,将光圈模块组装于镜头,再对组装完成的镜头进行测试,检查光圈模块的光圈圆心(光圈叶片的圆心)是否对准于镜头圆心(镜头通光孔圆心),然而,若组装过程中光圈圆心与镜头圆心产生偏移时,将影响组装后的镜头质量。
技术实现要素:
3.有鉴于此,在此提供一种镜头组装系统包含组装机构、转盘组件、至少一视觉组件、处理模块及通电机构。组装机构移动于通电工位及组装工位。转盘组件具有承载座,用以转动承载座至通电工位。视觉组件用以在通电工位获得第一影像,并在组装工位获得第二影像。处理模块用以依据第一影像获得第一驱动讯号、驱动位置及光圈圆心,并依据第二影像获得第二驱动讯号及镜头圆心。通电机构位于通电工位,用以依据第一驱动讯号及驱动位置产生通电运动。通电运动结束后,组装机构用以依据第二驱动讯产生组装运动,在组装工位将光圈圆心与镜头圆心重合。
4.在一些实施例中,镜头组装系统更包含热压机构。热压机构位于热压工位。热压机构用以在承载座位于热压工位时,产生热压运动。
5.在一些实施例中,承载座包含圆心侦测部及翼部,翼部径向延伸于圆心侦测部的两侧,翼部具有对位轴线。
6.在一些实施例中,通电机构更包含一探针座。探针座位于对位轴线一侧,探针座两侧分别具有第一探针组及第二探针组。通电机构依据通电运动,使第一探针组及第二探针组实质抵顶于对位轴线。
7.在一些实施例中,通电机构更包含第一移动模块及第二移动模块。第一移动模块连接于探针座,用以使第一探针组及第二探针组分别对应于驱动位置。第二移动模块连接于第一移动模块,用以使第一探针组及第二探针组实质抵顶于对位轴线。
8.在一些实施例中,热压机构更包含第一热压组件、第二热压组件及传动组件。第一热压组件位于对位轴线一侧。第二热压组件位于对位轴线另一侧。传动组件分别连接于第一热压组件及第二热压组件,并依据热压运动,带动第一热压组件与第二热压组件实质会合于对位轴线。
9.在一些实施例中,第一热压组件一端具有第一接触面。第二热压组件一端具有第二接触面。第一接触面与第二接触面接合后形成倾斜轴线。倾斜轴线与对位轴线之间具有夹角。
10.在一些实施例中,视觉组件用以在通电工位获得第三影像。处理模块用以依据第
三影像获得第二驱动讯号及固定位置。组装机构用以在热压运动结束后,依据第二驱动讯号及固定位置产生固定运动,且固定运动结束时,通电机构产生通电运动。
11.在一些实施例中,组装机构更包含转移组件及顶压件。转移组件位于对位轴线另一侧,用以在固定运动时,朝向圆心侦测部移动。顶压件位于转移组件两侧,用以在固定运动时,分别伸入翼部,使顶压件实质位于对位轴线。
12.在一些实施例中,顶压件间隔有第一距离,第一探针组与第二探针组具有第二距离,第一距离实质等于第二距离。
13.在一些实施例中,镜头组装系统包含取料机构。取料机构移动于取料工位及承载座。视觉组件用以在取料工位获得第四影像。处理模块用以依据第四影像获得第三驱动讯号及取料位置。取料机构用以依据第三驱动讯号及取料位置产生取料运动。
14.在一些实施例中,镜头组装系统更包含传送机构及感测器组。感测器组用以在传送机构一端产生第一启讯号,并在组装工位产生第一迄讯号。传送机构用以依据第一启讯号产生传送运动,并依据第一迄讯号停止传送运动。
15.在一些实施例中,组装机构更包含紫外光模块,紫外光模块位于转移组件两侧。
16.在一些实施例中,视觉组件包含第一摄像单元、第二摄像单元、第三摄像单元及第四摄像单元。第一摄像单元位于通电工位并用以获得第一影像。第二摄像单元位于组装工位并用以获得第二影像。第三摄像单元位于通电工位并用以获得第三影像。第四摄像单元位于取料工位并用以获得第四影像。
17.在一些实施例中,镜头组装系统更包含光源模块,光源模块位于转盘组件与第一摄像单元之间。
18.综上所述,在一些实施例中,一种镜头组装系统通过转盘组件,将放置在承载座的光圈模块转移到通电工位,并通过位于通电工位的通电机构对光圈模块进行通电运动,以确定光圈模块的光圈圆心,再通过组装机构将位于通电工位的光圈模块转移到组装工位,并且在组装工位将光圈圆心与镜头圆心重合后,再将光圈模块组装于镜头模块。据此,镜头组装系统可在光圈模块尚未组装于镜头模块时,就先确定出光圈圆心的坐标及镜头圆心的坐标,如此以提升组装完成的镜头模块的同心度,并缩短镜头模块的组装时间及检测时间。
19.以下提出各种实施例进行详细说明,然而,实施例仅用以作为范例说明,并不会限缩本发明欲保护的范围。此外,实施例中的图式省略部份元件,以清楚显示本发明的技术特点。在所有图式中相同的标号将用于表示相同或相似的元件。
附图说明
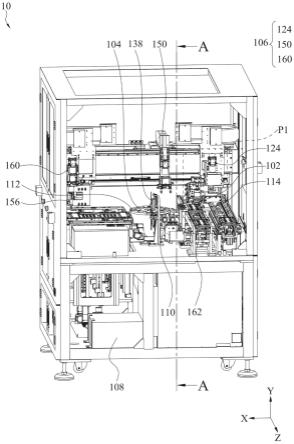
20.图1为根据本发明一些实施例中,镜头组装系统的立体图。
21.图2为图1在a-a方向的剖面图,显示通电机构相对于转盘组件的位置关系。
22.图3为根据本发明一些实施例中,镜头组装系统的局部俯视图,显示通电工位及热压工位相对于转盘组件的位置关系。
23.图4为根据本发明一些实施例中,光圈模块组装于镜头模块后,光圈圆心与镜头圆心重合的示意图。
24.图5为图3在b-b方向的局部剖面图,显示光圈模块位于承载座的相对位置。
25.图6为图2中第一摄像单元在仰视角度所拍摄到的第一影像示意图。
26.图7为图1在a-a方向的剖面图,显示组装机构与通电机构在通电工位的对应关系。
27.图8为根据本发明一些实施例中,光圈模块于通电工位时,通电机构进行通电运动的示意图。
28.图9为图1在a-a方向的剖面图,显示热压机构在热压工位的对应关系。
29.图10为图9中区域9的放大图,显示热压机构在热压工位对光圈模块进行热压运动。
30.图11为根据本发明一些实施例中,光圈模块于通电工位时,组装机构移动至固定位置的示意图。
31.图12为根据本发明一些实施例中,光圈模块位于取料工位时,取料机构进行取料运动的示意图。
32.图13为图1在a-a方向的剖面图,传送机构进行传送运动,将镜头模块传送至组装工位的示意图。
33.其中,附图标记:
34.10:镜头组装系统
35.102:组装机构
36.104:转盘组件
37.106:视觉组件
38.108:处理模块
39.110:通电机构
40.112,112a,112b:承载座
41.114:组装盘
42.116:转盘
43.118:旋转座
44.120:圆心侦测部
45.122,122’:翼部
46.124:第一摄像单元
47.126:第二摄像单元
48.128:探针座
49.130:第一探针组
50.132:第二探针组
51.134:第一移动模块
52.136:第二移动模块
53.138:热压机构
54.140:第一热压组件
55.142:第二热压组件
56.144、144’:传动组件
57.146:第一接触面
58.148:第二接触面
59.150:第三摄像单元
60.152:转移组件
61.154,154’:顶压件
62.156:取料机构
63.158:盛料盘
64.160:第四摄像单元
65.162:传送机构
66.164:感测器组
67.166:第一感测器
68.168:第二感测器
69.170:紫外光模块
70.172:光源模块
71.20:光圈模块
72.202:光圈本体
73.204、204’:电连接部
74.30:镜头模块
75.302:镜头本体
76.c1:光圈圆心
77.c2:镜头圆心
78.d1:第一距离
79.d2:第二距离
80.l:轴线
81.l1:对位轴线
82.l2:倾斜轴线
83.l3,l3’:铅锤线
84.p1:组装工位
85.p2:通电工位
86.p3:热压工位
87.p4:取料工位
具体实施方式
88.请参阅图1、图2、图3及图4。图1为根据本发明一些实施例中,镜头组装系统的立体图。图2为图1在a-a方向的剖面图,显示通电机构相对于转盘组件的位置关系。图3为根据本发明一些实施例中,镜头组装系统的局部俯视图,显示通电工位及热压工位相对于转盘组件的位置关系。图4为根据本发明一些实施例中,光圈模块组装于镜头模块后,光圈圆心与镜头圆心重合的示意图。如图1至图4所示,镜头组装系统10包含一组装机构102、一转盘组件104、至少一视觉组件106、一处理模块108及一通电机构110。组装机构102移动于一组装工位p1及一通电工位p2。转盘组件104具有一承载座112,用以转动承载座112至一通电工位p2。视觉组件106用以在通电工位p2获得一第一影像,并在组装工位p1获得一第二影像。处理模块108用以依据第一影像获得一第一驱动讯号、一驱动位置及一光圈圆心c1,并依据第
二影像获得一第二驱动讯号及一镜头圆心c2(容后详述)。通电机构110位于通电工位p2,用以依据第一驱动讯号及驱动位置产生一通电运动。通电运动结束后,组装机构102用以依据第二驱动讯号产生一组装运动,在组装工位p1将光圈圆心c1与镜头圆心c2重合(容后详述)。
89.在一些实施例中,镜头组装系统10设置于一镜头制造产线之中,可将一光圈模块20组装及固定于一镜头模块30。其中,镜头制造产线可包含一上料设备、一点胶设备及一下料设备。在一些实施例中,镜头组装系统10可以邻设于点胶设备与下料设备之间。
90.如图4所示,光圈模块20可例如为一可变光圈模块,其中,光圈模块20具有多个光圈叶片,光圈模块20未被致动时,光圈叶片是呈封闭状,光圈模块20被致动后(例如经过通电及驱动程序的驱动),各光圈叶片会展开以形成光圈圆心c1。镜头模块30可例如为一微型镜头(例如手机镜头模块),镜头模块30常态下露出有镜头圆心c2。
91.如图1至图4所示,在一些实施例中,组装机构102可通过一滑轨组或一机械手臂移动于组装工位p1及通电工位p2。其中,组装机构102可依据第二驱动讯号产生组装运动,并依据一第三驱动讯号产生一固定运动(容后说明)。组装运动可以是指,当处理模块108获得光圈圆心c1及镜头圆心c2后,组装机构102可将位于承载座112的光圈模块20从通电工位p2转移至组装工位p1(可以是指组装机构102以图1中x轴方向移动),使得光圈圆心c1与镜头圆心c2可在组装工位p1重合,并且在光圈圆心c1与镜头圆心c2保持重合的状态下,将光圈模块20组装及固定于镜头模块30(可以是指组装机构102以图1中y轴方向移动,将光圈模块20堆叠于镜头模块30)。如图4所示,前述光圈圆心c1与镜头圆心c2重合可以是指,光圈圆心c1重合于镜头圆心c2同轴设置的一轴线l,组装机构102进行组装运动时,组装机构102可沿着轴线l,将光圈模块20组装于镜头模块30,以保持光圈圆心c1可与镜头圆心c2重合。
92.再如图4所示,在一些实施例中,镜头组装系统10更包含一组装盘114。组装盘114用以放置镜头模块30,其中,镜头模块30被放置到组装盘114之前,可先对镜头模块30进行点胶作业,使得光圈模块20的光圈圆心c1与镜头模块30的镜头圆心c2重合时,光圈模块20与镜头模块30可通过一接合胶(例如光固化胶)相互接合。组装盘114可以常态位于组装工位p1,也可以是以人工或机械输送至组装工位p1(容后说明)。
93.在一些实施例中,如图2及图3所示,转盘组件104包含一转盘116及一旋转座118,承载座112连接于转盘116,旋转座118被致动后可产生一旋转运动,并且旋转座118可带动转盘116移动至通电工位p2,使得承载座112可位于通电工位p2。在一些实施例中,转盘组件104可以通过处理模块108或者通过一控制装置(例如,可程序化逻辑控制器(programmable logic controller,plc))控制旋转座118转动。
94.请参阅图5,图5为图3在b-b方向的局部剖面图,显示光圈模块位于承载座的相对位置。如图5所示,在一些实施例中,承载座112包含一圆心侦测部120及二翼部(122、122’),二翼部(122、122’)径向延伸于圆心侦测部120的两侧,二翼部(122、122’)具有一对位轴线l1。光圈模块20包含一光圈本体202及二电连接部(204、204’)。当光圈模块20放置于承载座112时,光圈本体202位于圆心侦测部120,而二电连接部(204、204’)分别位于二翼部(122、122’)。需说明的是,光圈模块20在通电工位p2时,二电连接部(204、204’)实质位于对位轴线l1,其中,对位轴线l1可以是一水平线(如图5中z轴延伸的轴线)。若二电连接部(204、204’)并未位于对位轴线l1,镜头组装系统10可通过热压方式调整二电连接部(204、204’)
的角度,使二电连接部(204、204’)位于对位轴线l1(容后详述)。
95.如图1至图6所示。图6为图2中第一摄像单元在仰视角度所拍摄到的第一影像示意图。如图1至图6所示,视觉组件106可例如为一摄像镜头。在一些实施例中,视觉组件106包含一第一摄像单元124及一第二摄像单元126。第一摄像单元124位于通电工位p2,并用以获得第一影像。第二摄像单元126位于组装工位p1,并用以获得第二影像。第一影像可以是指承载座112位于通电工位p2时,第一摄像单元124在仰视角度(如图2中往y轴正值方向)所拍摄到光圈模块20放置于承载座112的影像,因此,即如图6所示,第一影像可包含光圈模块20的光圈本体202及二电连接部(204、204’)。再如图4所示,第二影像可以是指镜头模块30位于组装工位p1时,第二摄像单元126在俯视角度(如图4中往y轴负值方向)所拍摄到镜头模块30放置于组装盘114的影像,因此,第二影像可包含镜头模块30的镜头本体302。其中,第一摄像单元124及/或第二摄像单元126可以持续撷取影像(第一影像或第二影像),也可以是在组装工位p1及通电工位p2具有一感测器,当感测器侦测到放置有光圈模块20的承载座112转动到通电工位p2时,致动第一摄像单元124。而当感测器侦测到光圈模块20被转移至组装工位p1的组装盘114时,致动第二摄像单元126。
96.如图1至图6所示,处理模块108耦接于组装机构102、转盘组件104、视觉组件106及通电机构110。处理模块108可例如为一计算机装置或可程序化逻辑控制器等具运算能力的电子装置,也可以是一中央处理器(central processing unit,cpu)或一微控制单元(microcontroller unit)等具运算能力的芯片。处理模块108可执行一处理程序,使得处理模块108在取得视觉组件106所拍摄到的影像(例如第一影像或第二影像)后,处理模块108可进一步从影像中计算出光圈圆心c1、镜头圆心c2及驱动位置的坐标,其中,处理程序可例如但不限于二次拟合圆算法。举例而言,光圈模块20在通电运动之前尚未打开光圈,此刻的处理模块108可依据第一影像计算出驱动位置(如图6中虚线区域),驱动位置可以是指光圈模块20两侧的二电连接部(204、204’)的坐标位置。在通电运动过程中,光圈模块20会将光圈打开,此刻的处理模块108可在第一影像计算出光圈圆心c1。其中,光圈圆心c1可以是指光圈圆心c1涵盖的区域(如图6中虚线圆形区域)或中心点。当镜头模块30被传送至组装工位p1,此刻的处理模块108可在第二影像计算出镜头圆心c2(可以是指镜头圆心c2涵盖的区域或中心点)。此外,处理模块108获得驱动位置后,处理模块108可依据驱动位置的坐标产生第一驱动讯号,使通电机构110依据第一驱动讯号及驱动位置进行通电运动(容后详述通电运动)。处理模块108获得光圈圆心c1及镜头圆心c2后,处理模块108可依据光圈圆心c1及镜头圆心c2的坐标产生第二驱动讯号,使组装机构102依据第二驱动讯号进行组装运动。依此,处理模块108可依据第一影像及/或第二影像获得相对应的坐标位置,同心度可管控在
±
0.1mm,以精准地引导组装机构102及/或通电机构110移动到的正确的位置。
97.请合并参阅图1至图7。图7为图1在a-a方向的剖面图,显示组装机构与通电机构在通电工位的对应关系。如图1至图7所示,通电机构110被致动后可产生通电运动。其中,通电运动可以是指,光圈模块20位于通电工位p2时,处理模块108依据第一影像计算出驱动位置后,通电机构110移动至驱动位置,对光圈模块20的二电连接部(204、204’)进行通电,使光圈模块20打开光圈。请合并参阅图8,图8为根据本发明一些实施例中,光圈模块于通电工位时,通电机构进行通电运动的示意图。如图7及图8所示,在一些实施例中,通电机构110包含一探针座128,探针座128位于对位轴线l1一侧,探针座128两侧分别具有一第一探针组130
及一第二探针组132,通电机构110依据通电运动,使第一探针组130及第二探针组132实质抵顶于对位轴线l1。具体而言,探针座128可对光圈模块20进行通电,当第一探针组130与第二探针组132位于对位轴线l1时,第一探针组130与第二探针组132可分别抵顶至光圈模块20的二电连接部(204、204’),使第一探针组130、第二探针组132与二电连接部(204、204’)呈电导通状态,以致动光圈模块20打开光圈至最接近圆的状态,以形成光圈圆心c1。通电机构110更包含一第一移动模块134及一第二移动模块136。其中,第一移动模块134连接于探针座128,用以使第一探针组130及第二探针组132分别对应于驱动位置。第二移动模块136连接于第一移动模块134,用以使第一探针组130及第二探针组132实质抵顶于对位轴线l1。其中,第一移动模块134与第二移动模块136可例如为一马达或一汽缸推杆组。第一移动模块134可依据第一驱动讯号及驱动位置的一水平向坐标,带动探针座128作水平移动(如图7中z轴方向)。第二移动模块136可在第一移动模块134对位于驱动位置后,依据第一驱动讯号及驱动位置的一垂直向坐标,再带动第一移动模块134及探针座128作垂直移动(如图7中y轴方向)。
98.请合并参阅图1至图9,图9为图1在a-a方向的剖面图,显示热压机构在热压工位的对应关系。如图1至图9所示,在一些实施例中,镜头组装系统10更包含一热压机构138。转盘组件104包含一热压工位p3。热压机构138位于转盘组件104的热压工位p3,热压机构138用以在承载座112位于热压工位p3时,产生一热压运动。在一些实施例中,光圈模块20放置于承载座112后,承载座112可先从初始位置转动到热压工位p3进行热压,再转动到通电工位p2进行通电检测以获得光圈圆心c1。其中,通电工位p2与热压工位p3可以相差90度,也就是说,当承载座112位于热压工位p3完成热压后,旋转座118可带动转盘116转动90度,使承载座112从热压工位p3移动到通电工位p2。热压运动可以是指,当光圈模块20位于热压工位p3时,热压机构138可对光圈模块20的二电连接部(204、204’)进行加热及挤压,使二电连接部(204、204’)经过热压后,调整至便于第一探针组130及第二探针组132通电的角度,例如,将二电连接部(204、204’)热压至对位轴线l1。
99.再如图9所示,在一些实施例中,热压机构138更包含一第一热压组件140、一第二热压组件142及一传动组件(144、144’)。第一热压组件140位于对位轴线l1的一侧。第二热压组件142位于对位轴线l1的另一侧。传动组件144连接于第一热压组件140,传动组件144’连接于第二热压组件142。并依据热压运动,带动第一热压组件140与第二热压组件142实质抵止于对位轴线l1。具体而言,当光圈模块20位于热压工位p3时,传动组件(144、144’)分别带动第一热压组件140及第二热压组件142朝向彼此移动,使第一热压组件140及第二热压组件142彼此抵止于对位轴线l1,以对二电连接部(204、204’)进行加热及挤压。其中,热压运动进行的过程中,第一热压组件140及第二热压组件142必须先加热至一默认温度,足够的温度可使二电连接部(204、204’)热压塑形,其中,默认温度可例如为摄氏90度,可根据二电连接部(204、204’)的材质特性设定默认温度,但凡可达到热压塑形的温度范围皆可以实施,不以前述温度为限。因此,热压运动开始前,热压机构138可先致动第一热压组件140及第二热压组件142,使第一热压组件140及第二热压组件142加热默认温度后再进行热压运动。
100.在一些实施例中,热压运动可以是在承载座112转动到热压工位p3时,热压机构138直接或间接致动传动组件144。其中,热压机构138直接致动传动组件144,可以是指承载
座112转动到热压工位p3时,热压机构138立即致动传动组件144。也可以是指承载座112转动到热压工位p3时,热压机构138等待一预设时间后再致动传动组件144,其中,默认时间可以是第一热压组件140及第二热压组件142加热至默认温度的时间。在一些实施例中,热压机构138可以设置感测器,感测器可侦测承载座112转动到热压工位p3,使热压机构138执行热压运动。
101.请参阅图10。图10为图9中区域9的放大图,显示热压机构在热压工位对光圈模块进行热压运动。如图10所示,在一些实施例中,第一热压组件140一端具有一第一接触面146,第二热压组件142一端具有一第二接触面148,第一接触面146与第二接触面148接合后形成一倾斜轴线l2,倾斜轴线l2与对位轴线l1之间具有一夹角。具体而言,当热压机构138进行热压运动,且第一热压组件140与第二热压组件142抵止于对位轴线l1时,由于二电连接部(204、204’)可能会因自身弹性略为复位,而未达到适当的通电角度,因此,第一热压组件140与第二热压组件142通过呈斜面的第一接触面146与第二接触面148,使第一热压组件140与第二热压组件142抵止于对位轴线l1时,二电连接部(204、204’)会被弯折至倾斜轴线l2的角度,当第一热压组件140与第二热压组件142分离于二电连接部(204、204’)后,二电连接部(204、204’)可通过自身弹性逐渐塑形至适合通电的角度(即平行于对位轴线l1)。在一些实施例中,倾斜轴线l2与对位轴线l1之间的夹角为10度。
102.请合并参阅图1至图6及图11。图11为根据本发明一些实施例中,光圈模块于通电工位时,组装机构移动至固定位置的示意图。如图1至图6及图11所示,在一些实施例中,视觉组件106用以在通电工位p2获得一第三影像。处理模块108用以依据第三影像获得一第二驱动讯号及一固定位置。组装机构102用以在热压运动结束后,依据第二驱动讯号及固定位置产生一固定运动。固定运定结束时,通电机构110产生通电运动。在一些实施例中,视觉组件106更包含一第三摄像单元150。第三摄像单元150位于通电工位p2并用以获得第三影像,其中,第三影像可以是指承载座112位于通电工位p2时,第三摄像单元150拍摄到放置于承载座112上光圈模块20的影像,因此,第三影像包含光圈本体202。组装运动可以是指组装机构102依据第二驱动讯号移动到固定位置对光圈模块20进行固定及计算,使通电机构110进行通电运动时,可维持电连接部(204、204’)位于对位轴线l1及维持光圈本体202不动。固定位置可以是指处理模块108取得第三影像后,于第三影像中计算出光圈本体202的位置(如图6所示)。因此,当组装盘114转动到通电工位p2时,第三摄像单元150即可产生包含光圈本体202的第三影像,使得处理模块108可依据第三影像获得第二驱动讯号及固定位置。
103.再如图8及图11所示,在一些实施例中,组装机构102更包含一转移组件152及二顶压件(154、154’)。转移组件152位于对位轴线l1另一侧。转移组件152用以在固定运动时,朝向圆心侦测部120移动,使转移组件152可以压制及提起光圈本体202。二顶压件(154、154’)位于转移组件152两侧。二顶压件(154、154’)用以在固定运动时,分别伸入二翼部(122、122’),使二顶压件(154、154’)实质位于对位轴线l1。其中,转移组件152可例如为一真空吸盘组。转移组件152进行固定运动时,转移组件152可压制及固定住光圈本体202于承载座112(如图11所示),并在通电机构110完成通电运动,第一探针组130与第二探针组132离开二电连接部(204、204’)时,可避免晃动光圈模块20造成光圈圆心c1产生偏移。并且转移组件152可于承载座112取出光圈模块20(转移组件152可以利用真空吸取光圈模块20),转移至组装工位p1的组装盘114,使光圈模块20可组装于镜头模块30。此外,在通电运动开始前,
二顶压件(154、154’)会位于对位轴线l1。在通电运动开始时,第一探针组130与第二探针组132会分别抵顶在二电连接部(204、204’),而二顶压件(154、154’)可挡止住第一探针组130与第二探针组132,使二电连接部(204、204’)始终维持在对位轴线l1。
104.再如图8所示,在一些实施例中,二顶压件(154、154’)间隔有一第一距离d1,第一探针组130与第二探针组132具有一第二距离d2,第一距离d1实质等于第二距离d2。借此,第一探针组130与第二探针组132分别抵顶在二电连接部(204、204’)时,顶压件154可与第一探针组130对应于一铅锤线l3,而顶压件154’可与第二探针组132对应于一铅锤线l3’。借此可避免第一探针组130与第二探针组132推顶二电连接部(204、204’)时,第一探针组130与第二探针组132分别与二顶压件(154、154’)形成错位,而造成二电连接部(204、204’)弯折。需说明的是,顶压件(154、154’)对应于铅锤线(l3、l3’),可以是指第一探针组130与第二探针组132平行于铅锤线(l3、l3’),且铅锤线(l3、l3’)分别通过顶压件(154、154’)、第一探针组130或第二探针组132。在一些实施例中,探针座128具有数组第一探针组130与数组第二探针组132,且数组第一探针组130及数组第二探针组132分别是数组排列或交错排列于探针座128。依此,当数组第一探针组130与数组第二探针组132移动至驱动位置时,即使有任一组第一探针组130或任一组第二探针组132未直接接触二电连接部(204、204’),其他第一探针组130或其他第二探针组132仍可以接触到二电连接部(204、204’),以确保探针座128可以顺利对光圈模块20进行通电。
105.请合并参阅图1、图3及图12。图12为根据本发明一些实施例中,光圈模块位于取料工位时,取料机构进行取料运动的示意图。如图1、图3及图12所示,在一些实施例中,镜头组装系统10更包含一取料机构156。取料机构156移动一取料工位p4及承载座112。视觉组件106用以在取料工位p4获得一第四影像。处理模块108用以依据第四影像获得一第三驱动讯号及一取料位置。取料机构156用以依据第三驱动讯号及取料位置产生一取料运动。在一些实施例中,镜头组装系统10更包含一盛料盘158,盛料盘158位于取料工位p4。视觉组件106更包含一第四摄像单元160。第四摄像单元160位于取料工位p4并用以获得第四影像。其中,第四影像可以是指盛料盘158位于取料工位p4时,第四摄像单元160在俯视角度(如图12中y轴负值方向)所拍摄到光圈模块20放置于盛料盘158的影像,因此,第四影像可包含光圈本体202及二电连接部(204、204’)。取料位置可以是指光圈模块20放置于盛料盘158时,放置于盛料盘158上光圈本体202的坐标位置。取料运动可以是指,当处理模块108依据第四影像获得取料位置后,取料机构156将光圈模块20从盛料盘158转移至承载座112。
106.再如图3所示,在一些实施例中,转盘组件104设置多个承载座(112、112a、112b),当取料机构156将光圈模块20从盛料盘158转移至承载座112,转盘组件104依序将承载座112转动到热压工位p3及通电工位p2。如图3中所示,当转盘组件104进行一次转动,承载座112将转动到热压工位p3,而承载座112a将转动到组装工位p1,此刻的组装机构102已将承载座112b的光圈模块20转移到组装盘114,并且将离开通电工位p2。下一次转动时,取料机构156可以再将盛料盘158的光圈模块20转移到承载座112b,并且将承载座112b转动到热压工位p3,凭借前述循环作动,镜头组装系统10在各个工位的运作顺序配合之下,可符合产线的连续作业要求。
107.请参阅图13,图13为图1在a-a方向的剖面图,传送机构进行传送运动,将镜头模块传送至组装工位的示意图。如图13所示,镜头组装系统10更包含一传送机构162及一感测器
组164。感测器组164用以在传送机构162一端(可依据产线方向决定)产生一第一启讯号,并载组装工位p1产生一第一迄讯号。传送机构162用以依据第一启讯号产生一传送运动,并依据第一迄讯号停止传送运动。其中,传送机构162可例如为一滚轮组、一轨道组或一输送带。感测器组164可例如为一光学感测器或一超音波感测器。在一些实施例中,传送机构162的两端可分别连接点胶设备及下料设备,当点胶设备对组装盘114上全部镜头模块30涂布光固化胶后,组装盘114可通过传送机构162传送至镜头组装系统10,于组装工位p1,将光圈模块20组装于镜头模块30。并且,当组装机构102对组装盘114中全部镜头模块30完成组装后,传送机构162可再进行传送运动,将组装盘114传送到下料设备。
108.再如图13所示,在一些实施例中,感测器组164可包含一第一感测器166及一第二感测器168。其中,第一感测器166位于传送机构162的一端,并用以产生第一启讯号。第二感测器168位于组装工位p1,并用以产生第一迄讯号。传送运动可以是指,当第一感测器166感测到组装盘114放置于传送机构162时,第一感测器166可产生第一启讯号,使传送机构162将组装盘114传送至组装工位p1。当第二感测器168感测到组装盘114位于组装工位p1时,第二感测器168可产生第一迄讯号,使传送机构162暂停传送组装盘114,将传送机构162停留在组装工位p1。在一些实施例中,当组装机构102对组装盘114中全部镜头模块30完成组装时,传送机构162再进行传送运动。举例而言,当组装盘114位于组装工位p1,传送机构162暂停传送运动时,传送机构162可以通过一计数器进行计数,当计数达到一组装时间时,传送机构162再进行传送运动,其中,组装时间可以是指组装机构102对全部镜头模块30完成组装的时间。也可以是组装机构102对全部镜头模块30完成组装后,以人工方式从组装工位p1移走组装盘114。也可以是处理模块108依据第一影像判断全部镜头模块30已完成组装时,处理模块108致动传送机构162恢复传送运动。
109.再如图4所示,在一些实施例中,组装机构102更包含一紫外光模块170,紫外光模块170位于转移组件152两侧。当转移组件152将光圈圆心c1与镜头圆心c2相互重合时,转移组件152可将光圈模块20组装于镜头模块30,此时,组装机构102可致动紫外光模块170,使紫外光模块170将一紫外光源照射在光固化胶,使光固化胶得以凝固,借此,光圈模块20得以固定于镜头模块30。
110.再如图2所示,在一些实施例中,镜头组装系统10更包含一光源模块172,光源模块172位于转盘组件104与第一摄像单元124之间。当第一摄像单元124撷取第一影像时,可致动光源模块172产生一辅助光源,使得第一摄像单元124在低光源的环境下,仍可通过辅助光源的照明撷取到清晰的第一影像,使处理模块108可以准确地计算出光圈本体202及二电连接部(204、204’)。在一些实施例中,镜头组装系统10也可以增设光源模块172,将各光源模块172分别连接于第二摄像单元126、第三摄像单元150及/或第四摄像单元160,以辅助前述的各摄像单元(124、126、150、160)撷取影像。
111.综上所述,在一些实施例中,一种镜头组装系统10通过转盘组件104,将放置在承载座112的光圈模块20转移到通电工位p2,并通过位于通电工位p2的通电机构110对光圈模块20进行通电运动,以确定出光圈模块20的光圈圆心c1,再通过组装机构102将位于通电工位p2的光圈模块20转移到组装工位p1,并且在组装工位p1将光圈圆心c1与镜头圆心c2重合后,再将光圈模块20组装于镜头模块30。
112.虽然本发明的技术内容已经以较佳实施例揭露如上,然其并非用以限定本发明,
任何熟习此技艺者,在不脱离本发明的精神所作些许的更动与润饰,皆应涵盖于本发明的范畴内,因此本发明的保护范围当视后附的权利要求范围所界定者为准。
113.当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1