一种用于智能门铃的透镜结构的制作方法
1.本实用新型属于光学配件技术领域,尤其是涉及一种用于智能门铃的透镜结构。
背景技术:
2.智能门铃在生活中的应用越来越广泛,其功能设计也越来越完善,其中一项重要功能即是对人体移动的红外感应,该功能应用了被动红外探测技术,被动红外探测技术需要两个关键元件,一是热释电红外传感器pir,一是菲涅尔透镜;热释电红外传感器(pir)能将红外信号变化转变为电信号,并能对自然界中的白光信号具有抑制作用,当无人体移动时,热释电红外感应器感应到的只是背景温度,当人体进人探测区时,通过菲涅尔透镜,热释电红外感应器感应到的是人体温度与背景温度的差异信号;菲涅尔透镜作用有两个:一是聚焦作用,即将热释的红外信号折射(反射)在pir上,第二个作用是将警戒区内分为若干个明区和暗区,使进入警戒区的移动物体能以温度变化的形式在pir上产生变化热释红外信号,这样pir就能产生变化的电信号。
3.现有技术中,已有“申请号202020659553.9、一种用于智能门铃的透镜结构”专利,镜体分为上中下三个视区,上层和中层视区对应面为水平面,该透镜存在上层和中层视区间的探测盲区面积较大、探测角度小、视区范围小等问题,不能很好满足智能摄像头对于周边环境的人体探测功能的需求。
技术实现要素:
4.有鉴于此,本实用新型旨在提出一种用于智能门铃的透镜结构,通过透镜的分区布局配合焦距的光学设计,增大透镜探测感应范围,减小探测盲区面积,以满足智能门铃对周边环境探测需求。
5.为达到上述目的,本实用新型的技术方案是这样实现的:
6.一种用于智能门铃的透镜结构,包括圆形的镜体,所述圆形镜体分为上层视区、中层视区、下层视区;所述上层视区、中层视区、下层视区各自包括若干小区块,所述小区块都为设置有菲涅尔纹路的透镜片,且都聚焦于所述智能门铃的热释电传感器的感应位置;
7.所述中层视区顶面为下凹曲面,所述上层视区底面为和该下凹曲面匹配的下凸曲面。
8.进一步的,所述上层视区各小区块并列排布,具有65
°
的光学夹角,位于左边缘小区块的菲涅尔纹路的同心圆圆心偏左下方,位于右边缘小区块的菲涅尔纹路的同心圆圆心偏右下方,其余位于二者之间的小区块的菲涅尔纹路的同心圆圆心位于自身垂直中心线。
9.进一步的,所述中层视区小区块数量为2n个,n为≥2的自然数,该2n个小区块在上层视区之下并列排布,具有130
°
的光学夹角,位于中层视区左侧小区块的菲涅尔纹路的同心圆圆心位置都位于自身垂直中心线偏左,位于中层视区右侧小区块的菲涅尔纹路的同心圆圆心位置都位于自身垂直中心线偏右。
10.进一步的,所述中层视区左右边缘两个小区块菲涅尔纹路的同心圆圆心等高,中
间小区块的菲涅尔纹路的同心圆圆心等高,且高于左右边缘两个小区块菲涅尔纹路的同心圆圆心。
11.进一步的,所述下层视区各小区块在中层视区之下并列排布,具有65
°
的光学夹角,位于左边缘小区块的菲涅尔纹路的同心圆圆心位于下层视区外侧偏左下方位置,位于右边缘小区块的菲涅尔纹路的同心圆圆心位于下层视区外侧偏右下方位置,其余位于二者之间的小区块的菲涅尔纹路的同心圆圆心位于自身垂直中心线上,且高于左右边缘小区块的同心圆圆心。
12.进一步的,所述下层视区左右边缘小区块的菲涅尔纹路的同心圆圆心等高。
13.进一步的,所述上层视区、下层视区各自左右边缘小区块的宽度都小于各自所含的其它小区块的宽度,所述中层视区小区块等宽设置。
14.相对于现有技术,本实用新型所述的一种用于智能门铃的透镜结构具有以下优势:
15.本实用新型所提出的透镜结构巧妙的利用菲涅尔原理,圆形镜体中左、右边缘处小区块菲涅尔纹路的同心圆圆心都位于自身垂直中心线外侧,将左右探测角度提高到130
°
角,超过同类产品探测角度和视区范围,同时上层视区和下层视区的对应面为下凸的曲面,减小了上层视区和下层视区之间探测盲区面积,能够满足智能门铃对周边环境探测需求。
附图说明
16.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
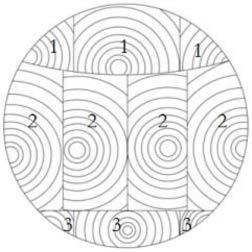
17.图1为本实用新型实施例所述的一种用于智能门铃的透镜结构示意图;
18.图2为实用新型实施例所述透镜结构在侧视区域和俯视区域的视区示意图。
19.附图标记说明:
20.1-上层视区;2-中层视区;3-下层视区。
具体实施方式
21.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
22.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
23.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地
连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
24.下面将参考附图并结合实施例来详细说明本实用新型。
25.本实用新型应用于智能门铃,其竖直设置在智能门铃的主面板上,透镜的正面面向外放探测环境,背面则聚焦于热释电传感器,共同构成红外探测,本实用新型应用的环境为:透镜所在的探测位置1.5米高,倾斜角度为0
°
,环境温度25
°
,人体行走1米/秒左右。
26.如图1所示,本实用新型结构为圆形的镜体,圆形镜体分为上中下三视区,上视区为远视区,下视区为近视区,具体说明如下:
27.a,上层视区1对应远视区(如图2中侧视side view所示,标注1的区域即为上层视区对应的区域),上层视区1在透镜结构中主要作用是补漏,避免由于人体位置或角度问题造成的其他视区的探测有遗漏。
28.上层视区1分为3个并列排布的小区块,具有65
°
的光学夹角,中间小区块宽度大于左右边缘小区块的宽度。3个小区块都为设置有菲涅尔纹路的透镜片,且都聚焦于所述智能门铃的热释电传感器的感应位置。位于左边缘小区块的菲涅尔纹路的同心圆圆心偏左下方,位于右边缘小区块的菲涅尔纹路的同心圆圆心偏右下方,中间小区块的菲涅尔纹路的同心圆圆心位于自身垂直中心线上。
29.b,中层视区2对应中视区(如图2中侧视side view所示,标注2的区域即为中层视区对应的区域):
30.中视区主要探测2-5米高人体信号,本实用新型的中层视区包括2n个小区块,本实施例以4个小区块为例说明,4个小区块宽度相等,且并列排布,具有130
°
的光学夹角,4个小区块都为设置有菲涅尔纹路的透镜片,且都聚焦于所述智能门铃的热释电传感器的感应位置。其中左侧2个小区块的菲涅尔纹路的同心圆圆心位置都位于自身垂直中心线偏左,右侧2个小区块的菲涅尔纹路的同心圆圆心位置都位于自身垂直中心线偏右,且左右边缘两个小区块菲涅尔纹路的同心圆圆心等高,中间2个小区块的菲涅尔纹路的同心圆圆心等高,且略高于左右边缘两个小区块菲涅尔纹路的同心圆圆心。该结构使得热释电传感器pir的聚焦点偏下,目的是增加中视区向上探测区域面积。
31.本实用新型中,中视区顶面为下凹曲面,上视区底面为下凸曲面,下凹曲面和下凸曲面相对应。该结构减小上视区和中视区间探测盲区面积,即增大中视区探测范围,如图2中侧视side view所示,标注2的区域和标注1的区域位置关系所示。中层视区4个小区块左右探测角度范围如图2的俯视top view所示,该中层视区4个小区块左右探测角度可达130
°
,超过同类产品探测角度和视区范围。
32.c,下层视区3对应近视区(如图2中侧视side view所示,标注3的区域即为下层视区对应的区域):
33.下层视区3主要探测身高0.5-2m的人体信号,分为3个小区块,且中间小区块宽度大于左右边缘小区块的宽度,3个小区块并列排布,具有65
°
的光学夹角,3个小区块都为设置有菲涅尔纹路的透镜片,且都聚焦于所述智能门铃的热释电传感器的感应位置。位于左边缘小区块的菲涅尔纹路的同心圆圆心位于下层视区3外侧偏左下方位置,位于右边缘小区块的菲涅尔纹路的同心圆圆心位于下层视区3外侧偏右下方位置,中间的小区块的菲涅
尔纹路的同心圆圆心位于自身垂直中心线上,且高于左右边缘小区块的同心圆圆心。该设计是为了实现透镜朝下捕捉近处目标,且水平探测范围增大,探测性能优于同类产品。
34.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1