可伸缩式内窥镜
1.本实用新型属于水下管道检测技术领域,具体涉及一种可伸缩式内窥镜。
背景技术:
2.电厂凝汽器是用来冷却高温蒸汽的一种设备,然而随着使用时间的积累凝汽器管道内壁会产生结垢,裂痕,腐蚀等问题,需要定期进行检测。因为管道铺设在水下,且一个电站凝汽器内部一般有10000根以上的不锈钢管,依靠人工检测效率低下,难以全面排查;冷凝管深度可达1米,直径仅10mm,具有深度大,直径小的问题。常规检测手段是工作人员手持便携式电子内窥镜,工作人员需要将软管插入细小管口,操作困难。因此,有必要设计一种可伸缩式水下微型内窥镜,克服人工检测的难题。
技术实现要素:
3.本实用新型目的是针对上述存在的问题和不足,提供一种可伸缩式内窥镜,其结构设计合理,大大降低了其结构体积,便于搭载于水下机器人上实现水下管道的检测,提高水下作业能力和工作效率。
4.为实现上述目的,所采取的技术方案是:
5.一种可伸缩式内窥镜,包括:
6.伸缩探杆,所述伸缩探杆至少包括匹配滑动密封套接的外套管和内套管;
7.成像设备,其设置在所述内套管的前端部;
8.牵引绳,在所述外套管内设置有牵引驱动部,所述牵引绳的第一端部与内套管连接,所述牵引绳的第二端部与牵引驱动部连接,所述牵引驱动部用于驱动所述伸缩探杆回缩;以及
9.气泵单元,所述伸缩探杆后端设置有密封端盖,所述伸缩探杆内部为密封腔室,所述气泵单元用于向所述伸缩探杆的密封腔室内充气,并推动所述伸缩探杆伸出。
10.根据本实用新型可伸缩式内窥镜,优选地,所述伸缩探杆还包括至少一个中间套管;在所述外套管、中间套管和内套管中,相邻的两套管之间匹配滑动密封套接连接。
11.根据本实用新型可伸缩式内窥镜,优选地,相邻两套管之间均设置有滑动密封结构,所述滑动密封结构包括:
12.内限位凸台,其布设于位于外侧的套管的内壁前端;
13.外止环,其布设于位于内侧的套管的外壁后端,所述外止环与所述内限位凸台相对设置;以及
14.密封圈,在所述内限位凸台上开设有密封槽,所述密封圈匹配设置在所述密封槽内;
15.在位于内侧的套管的外壁前端设置有缩回限位凸台,当对应的两套管回缩到位后,所述缩回限位凸台与对应的内限位凸台对应贴合限位。
16.根据本实用新型可伸缩式内窥镜,优选地,所述牵引驱动部包括设置在所述外套
管内的卷筒和驱动所述卷筒动作的微型电机,所述牵引绳的其中一端连接在所述卷筒上。
17.根据本实用新型可伸缩式内窥镜,优选地,所述牵引驱动部包括设置在所述外套管和内套管之间的滑轮组、以及布设在所述外套管内的微型气缸,所述牵引绳盘绕布设在所述滑轮组上并与所述微型气缸的动作端连接。
18.根据本实用新型可伸缩式内窥镜,优选地,所述密封端盖上设置有泄气阀和与气泵单元连通的充气接头,所述气泵单元包括:
19.充气泵;
20.储气罐,所述储气罐与所述充气泵通过第一输气管道连接;以及
21.控制阀,所述储气罐与所述密封端盖上的充气接头通过第二输气管道连通,所述控制阀布置在所述第二输气管道上。
22.根据本实用新型可伸缩式内窥镜,优选地,所述成像设备为微型相机。
23.根据本实用新型可伸缩式内窥镜,优选地,还包括控制存储模块,所述伸缩探杆内设置有与成像设备连接的数据传输线,所述数据传输线与控制存储模块连接。
24.采用上述技术方案,所取得的有益效果是:
25.本技术结构设计合理,大大降低了其结构体积,便于搭载于水下机器人上实现水下管道的检测,提高水下作业能力和工作效率。本技术通过伸缩探杆、牵引驱动部和气泵单元的设置,能够在径向有限的尺寸内实现各部件结构的装配,从而便于伸入凝汽器中的不锈钢管中进行对位检测。本技术的牵引驱动部能够配合牵引绳实现伸缩探杆的缩回,伸缩探杆的各套管之间通过滑动密封结构连接,从而使得内部空间形成稳定有效的密闭空间,本技术的气泵单元可以通过向密闭空间内充入高压气体,从而实现伸缩探杆的伸出。为了满足伸缩探杆的较小的外径尺寸和较长的轴向伸出尺寸的结构设计,本技术采用了外套管、内套管和多个中间套管的设置,使得其结构稳定性高,且满足径向尺寸和伸出长度的要求。
附图说明
26.为了更清楚地说明本实用新型实施例的技术方案,下文中将对本实用新型实施例的附图进行简单介绍。其中,附图仅仅用于展示本实用新型的一些实施例,而非将本实用新型的全部实施例限制于此。
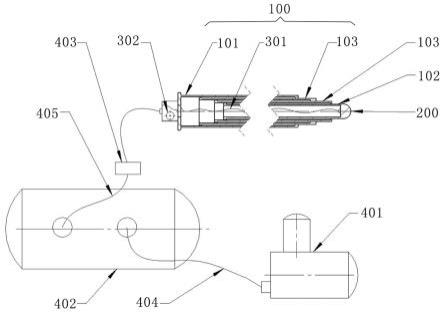
27.图1为本实用新型实施例的可伸缩式内窥镜的结构示意图。
28.图2为本实用新型实施例的伸缩探杆的结构示意图。
29.图3为本实用新型实施例的可伸缩式内窥镜装配于水下机器人上的工作状态结构示意图。
30.图中序号:
31.100为伸缩探杆、101为外套管、102为内套管、103为中间套管、104为内限位凸台、105为外止环、106为密封圈、107为缩回限位凸台、108为密封端盖、109为活动环;
32.200为微型相机;
33.301为牵引绳、302为卷筒;
34.401为充气泵、402为储气罐、403为控制阀、404为第一输气管道、405为第二输气管道;
35.510为水下机器人、520为待测管。
具体实施方式
36.下文中将结合本实用新型具体实施例的附图,对本实用新型实施例的示例方案进行清楚、完整地描述。除非另作定义,本实用新型使用的技术术语或者科学术语应当为所属领域内具有一般技能的人士所理解的通常意义。
37.在本实用新型的描述中,需要理解的是,“第一”、“第二”的表述用来描述本实用新型的各个元件,并不表示任何顺序、数量或者重要性的限制,而只是用来将一个部件和另一个部件区分开。
38.应注意到,当一个元件与另一元件存在“连接”、“耦合”或者“相连”的表述时,可以意味着其直接连接、耦合或相连,但应当理解的是,二者之间可能存在中间元件;即涵盖了直接连接和间接连接的位置关系。
39.应当注意到,使用“一个”或者“一”等类似词语也不必然表示数量限制。“包括”或者“包含”等类似的词语意指出现该词前面的元件或物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。
40.应注意到,“上”、“下”、“左”、“右”等指示方位或位置关系的术语,仅用于表示相对位置关系,其是为了便于描述本实用新型,而不是所指装置或元件必须具有特定的方位、以特定的方位构造和操作;当被描述对象的绝对位置改变后,则该相对位置关系也可能相应的改变。
41.如图1-图3所示,一种可伸缩式内窥镜,包括伸缩探杆100、成像设备、牵引绳301和气泵单元。通过上述结构,实现伸缩探杆的伸出和缩回动作,并且在整体结构的外径尺寸上满足带测量部件管道的管径要求,在长度方向上满足探入的深度要求。
42.伸缩探杆:是主体结构,通过多级套管的伸缩实现对待检测管道内的摄像拍照成像;具体地,伸缩探杆至少包括匹配滑动密封套接的外套管101和内套管102;成像设备设置在所述内套管102的前端部;本实施例中的伸缩探杆100还包括至少一个中间套管103,图中所示为两个中间套管103;在外套管101、中间套管103和内套管102中,相邻的两套管之间匹配滑动密封套接连接。
43.进一步地,本实施例中的相邻两套管之间均设置有滑动密封结构,滑动密封结构包括内限位凸台104、外止环105和密封圈106,内限位凸台104布设于位于外侧的套管的内壁前端;外止环105布设于位于内侧的套管的外壁后端,所述外止环105与所述内限位凸台104相对设置;在所述内限位凸台104上开设有密封槽,所述密封圈106匹配设置在所述密封槽内;在位于内侧的套管的外壁前端设置有缩回限位凸台107,当对应的两套管回缩到位后,所述缩回限位凸台107与对应的内限位凸台104对应贴合限位。
44.对于滑动杆密封结构还可以采用其他的不同形式,如图中所示,两道密封圈布置在对应的内限位凸台和外止环之间,在两道密封圈之间还布置有活动环。当进行滑动时,密封圈起到密封作用,当伸出至最大位置时,外止环、活动环、内限位凸台彼此挤压,从而使得两道密封圈受压,达到更好的密封效果。
45.牵引驱动部:用于对伸缩探杆的缩回动作进行驱动,在所述外套管101内设置有牵引驱动部,所述牵引绳301的第一端部与内套管102连接,所述牵引绳301的第二端部与牵引
驱动部连接,所述牵引驱动部用于驱动所述伸缩探杆100回缩。
46.牵引驱动部可以采用多种不同的结构形式,本实施例中给出了两种不同的结构形式:
47.牵引驱动部的结构形式一为:牵引驱动部包括设置在所述外套管101内的卷筒和驱动所述卷筒动作的微型电机,所述牵引绳301的其中一端连接在所述卷筒302上。通过微型电机带动卷筒旋转,进而实现牵引线的收卷,从而带动伸缩探杆的缩回,当伸缩探杆伸出时,微型电机不会对卷筒提供反向的作用力,会随着卷筒一同反向旋转,从而实现放线。
48.牵引驱动部的结构形式二为:牵引驱动部包括设置在所述外套管101和内套管102之间的滑轮组、以及布设在所述外套管101内的微型气缸,所述牵引绳301盘绕布设在所述滑轮组上并与所述微型气缸的动作端连接。通过微型气缸的布置和滑轮组的布置,能够在较短的形成内解决伸缩探杆的缩回问题,同样的,当伸缩探杆伸出时,微型气缸会随着牵引绳的动作进行被动的动作,而不会对伸缩探杆的伸出动作造成影响。
49.气泵单元:用于驱动伸缩探杆的伸出动作;伸缩探杆100后端设置有密封端盖108,所述伸缩探杆100内部为密封腔室,所述密封端盖108上设置有泄气阀和与气泵单元连通的充气接头,所述气泵单元用于向所述伸缩探杆的密封腔室内充气,并推动所述伸缩探杆伸出。
50.本实施例中的气泵单元包括充气泵401、储气罐402和控制阀403,所述储气罐402与所述充气泵401通过第一输气管道404连接;所述储气罐402与所述密封端盖108上的充气接头通过第二输气管道405连通,所述控制阀403布置在所述第二输气管道上。本技术的充气泵向储气罐中充气,当需要伸缩探杆伸出时,控制阀打开,此时伸缩探杆伸出,伸缩探杆的内腔中保持一定的正压,不仅可以避免外部水进入伸缩探杆内,而且可以保障伸缩探杆的有效伸出,结构稳定性更好。
51.本技术的成像设备为微型相机,其自带led灯光,本技术为了便于实现微型相机的控制和取像,还设置有控制存储模块,所述伸缩探杆内设置有与成像设备连接的数据传输线,所述数据传输线与控制存储模块连接。如图中所示,数据传输线与牵引绳为一体结构布置,使得其能够在伸缩探杆缩回时不受限制,为了避免数据传输线与微型相机接触点松脱,将数据传输线与内套管之间通过卡扣连接,在数据传输线作为牵引绳拉动内套管缩回时,接触点不受力。
52.工作时,伸缩探杆在空气压力推动下慢慢进入管道内,伸缩探杆顶端的微型相机拍摄管道内壁照片,照片数据通过数据传输线传输至机器人芯片中。采集到足够照片后进入收缩阶段,控制阀关闭,密封端盖上的排气阀打开,卷筒采用微型马达作为动力,将牵引绳盘卷回收,运动至各缩回限位凸台与相应的内限位凸台贴合顶撑后,停止运动,作业完成。
53.本技术结构设计合理,大大降低了其结构体积,便于搭载于水下机器人上实现水下管道的检测,提高水下作业能力和工作效率。本技术通过伸缩探杆、牵引驱动部和气泵单元的设置,能够在径向有限的尺寸内实现各部件结构的装配,从而便于伸入凝汽器中的不锈钢管中进行对位检测。本技术的牵引驱动部能够配合牵引绳实现伸缩探杆的缩回,伸缩探杆的各套管之间通过滑动密封结构连接,从而使得内部空间形成稳定有效的密闭空间,本技术的气泵单元可以通过向密闭空间内充入高压气体,从而实现伸缩探杆的伸出。为了
满足伸缩探杆的较小的外径尺寸和较长的轴向伸出尺寸的结构设计,本技术采用了外套管、内套管和多个中间套管的设置,使得其结构稳定性高,且满足径向尺寸和伸出长度的要求。
54.上文已详细描述了用于实现本实用新型的较佳实施例,但应理解,这些实施例的作用仅在于举例,而不在于以任何方式限制本实用新型的范围、适用或构造。本实用新型的保护范围由所附权利要求及其等同方式限定。所属领域的普通技术人员可以在本实用新型的教导下对前述各实施例作出诸多改变,这些改变均落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1