用于确定眼睛位置的方法与流程
本发明涉及一种用于确定眼睛位置的方法。
背景技术:
1、由现有技术已知用于确定眼睛位置的不同系统或者眼睛跟踪。例如,存在基于摄像机的系统,所述基于摄像机的系统使用图像数据或视频数据来跟踪眼睛运动。除此之外,存在如下系统:所述系统确定视网膜的电特性,用以确定眼睛位置。此外,由文献us2016/166146 a已知一种系统,该系统基于在眼睛组成部分上反射的光信号的强度确定眼睛的定向。
技术实现思路
1、本发明的任务在于提供一种改善的用于确定眼睛位置的方法。
2、该任务通过独立权利要求1的用于确定眼睛位置的方法来解决。有利的构型是从属权利要求的主题。
3、根据本发明的一个方面,提供一种用于确定眼睛位置的方法,所述方法包括:
4、通过至少一个激光干涉单元接收眼睛的激光反馈干涉测量的激光反馈干涉测量值,其中,所述测量值基于在眼睛的组成部分上反射的至少一个激光信号;
5、基于所述激光反馈干涉测量值,确定眼睛的组成部分相对于激光反馈干涉测量单元的速度分量;
6、基于所述速度分量,通过应用几何结构眼睛模型,确定眼睛围绕旋转轴线的旋转速度,其中,所述几何结构眼睛模型描述速度分量与围绕旋转轴线的旋转速度之间的相关性;
7、基于围绕旋转轴线的旋转速度,通过在预确定的时间区段内对所述旋转速度积分,求取眼睛位置;
8、提供所述眼睛位置。
9、由此可以实现如下技术优点:可以提供一种改善的用于确定眼睛位置的方法。为此,基于眼睛的激光反馈干涉测量的测量值确定眼睛的速度分量、尤其是眼睛的如下至少一个组成部分的速度分量:至少一个激光反馈干涉测量单元的激光信号在该至少一个组成部分上被反射。基于所确定的速度分量,在考虑几何结构眼睛模型的情况下,确定眼睛的相应的旋转速度,在所述几何结构眼睛模型中,描述该速度分量与围绕眼睛的旋转轴线的旋转速度之间的相关性。通过在预确定的时间区段内对旋转速度积分,可以求取并且提供眼睛的眼睛位置。
10、通过使用激光反馈干涉测量来确定眼睛位置,可以实现对眼睛位置的灵活确定。尤其是,由于相应的激光反馈干涉测量单元的在技术上简单且节省空间的构造,这些激光反馈干涉测量可以在如下设备中实施:所述设备仅提供有限的空间区域。例如,相应的眼睛位置确定适合用于数据眼镜、例如智能眼镜或者增强现实眼镜,在所述数据眼镜中,必须执行呈眼睛跟踪形式的眼睛位置确定,以便可以保证,在数据眼镜的如下区域中显示待显示的信息:该区域与数据眼镜的佩戴者的眼睛的视线方向一致。
11、通过使用几何结构眼睛模型,在所述几何结构眼睛模型中,使用人类眼睛的几何结构观察来描述测量出的速度分量与眼睛的旋转速度之间的相关性,并且通过应用生理眼睛运动模型,在所述生理眼睛运动模型中,考虑人类眼睛的眼睛动态的生理观察,可以基于激光反馈干涉测量的测量出的速度分量提供对眼睛位置的精确的确定。由此,可以基于激光反馈干涉测量实现改善的对眼睛位置的确定。
12、通过在预确定的时间区段内对旋转速度积分,可以确定精确的眼睛位置。在此,眼睛位置可以以相对于相应的旋转轴线的旋转角度的形式表达。然后,旋转速度是旋转角度的通过眼睛围绕相应的旋转轴线的旋转运动所导致的在时间上的变化。因此,基于求取出的旋转速度,通过积分可以根据求取出的旋转速度将眼睛围绕旋转轴线的旋转运动的如下相应的终点定义为眼睛位置:该眼睛在经过预确定的时间区段之后到达该终点。在此,在本技术的意义上,眼睛位置相应于眼睛的视线方向。通过积分,可以以高达1度的精度实现对眼睛位置或者视线方向的非常精确的确定。除此之外,积分能够实现在技术上简单且计算高效的用于确定眼睛位置的方法。
13、在本技术的意义上,速度分量应理解为速度矢量的矢量分量。
14、在本技术的意义上,眼睛组成部分是眼睛的物理上的组件,并且可以包括角膜、晶状体、虹膜、视网膜、巩膜或者其他组件。
15、根据一种实施方式,通过至少两个激光干涉单元接收激光反馈干涉测量的激光反馈干涉测量值,其中,针对至少两个激光干涉单元的测量值,确定速度分量,并且其中,所述方法此外包括:
16、基于激光反馈干涉测量单元的激光反馈干涉测量值,确定眼睛的组成部分相对于激光反馈干涉测量单元的间距分量;
17、基于间距分量,通过在考虑至少两个激光反馈干涉测量单元和眼睛相对于彼此的相对位置的情况下实施三角测量计算,确定眼睛位置;
18、在对速度分量的积分中,将所确定的眼睛位置用作起始点。
19、由此可以实现如下技术优点:可以实现一种改善的对眼睛位置的确定。为此,基于所确定的两个间距分量,在考虑至少两个激光反馈干涉测量单元与待测量的眼睛之间的三角测量比例的情况下,求取眼睛位置。通过使用这样确定的起始点,可以使通过积分求取出的眼睛位置精确化
20、在本技术的意义上,间距分量应理解为间距矢量的矢量分量。
21、根据一种实施方式,该方法此外包括:
22、确定激光反馈干涉测量单元的测量值的信噪比;
23、为激光反馈干涉测量单元的在时间上相继记录的测量值求取在信噪比方面的突然变化;
24、在考虑在时间上连续的测量值的信噪比的突然变化的情况下,将在时间上连续的测量值辨认为激光信号的测量值,所述激光信号被至少两个不同的眼睛组成部分反射;
25、辨认至少两个眼睛组成部分之间的过渡;
26、基于所辨认的在至少两个眼睛组成部分之间的过渡,确定眼睛位置。
27、由此可以实现如下技术优点:可以提供一种替代的用于确定眼睛位置的方案。在求取在两个在时间上相继记录的测量值的信噪比方面的突然变化时,基于所述突然变化和不同眼睛组成部分的不同反射能力,探测至少两个眼睛组成部分之间的过渡。因此,在考虑眼睛的生理构型和不同眼睛组成部分相对于彼此的相对布置的情况下,可以基于求取出的至少两个眼睛组成部分之间的过渡求取精确的眼睛位置。
28、根据一种实施方式,该方法此外包括:
29、基于所述信噪比,在考虑眼睛的眼睛组成部分的单独的反射能力的情况下,辨认所述眼睛组成部分;和/或
30、基于所述间距分量,在考虑眼睛的生理构造的情况下,辨认所述眼睛组成部分;
31、其中,所述眼睛组成部分被辨认为眼睛的虹膜、视网膜或者巩膜。
32、由此可以实现如下技术优点:能够实现对与眼睛位置的确定相关的眼睛组成部分的精确辨认。
33、根据一种实施方式,该方法此外包括:
34、基于所确定的眼睛位置,在考虑对眼睛的扫视眼睛运动(sakkadischenaugenbewegung)的生理描述的情况下,预测眼睛的运动的扫视终点;
35、将经预测的扫视终点提供为针对预确定的时间点预测的眼睛位置。
36、由此可以实现如下技术优点:在考虑扫视眼睛运动的情况下,可以以经预测的扫视终点的形式提供附加的经预测的眼睛位置。由此可以以附加的经预测的眼睛位置的形式实现或提高根据本发明的方法所提供的信息内容的进一步精确或范围。
37、根据一种实施方式,该方法此外包括:
38、在考虑通过在方法步骤中执行的三角测量计算求取出的眼睛位置和/或在方法步骤中通过信噪比的突然变化求取出的眼睛位置和/或在方法步骤中通过扫视终点预测求取出的眼睛位置的情况下,对在方法步骤中通过对旋转速度的积分求取出的眼睛位置实施校正。
39、由此可以实现如下技术优点:能够实现对眼睛位置的确定的进一步精确。
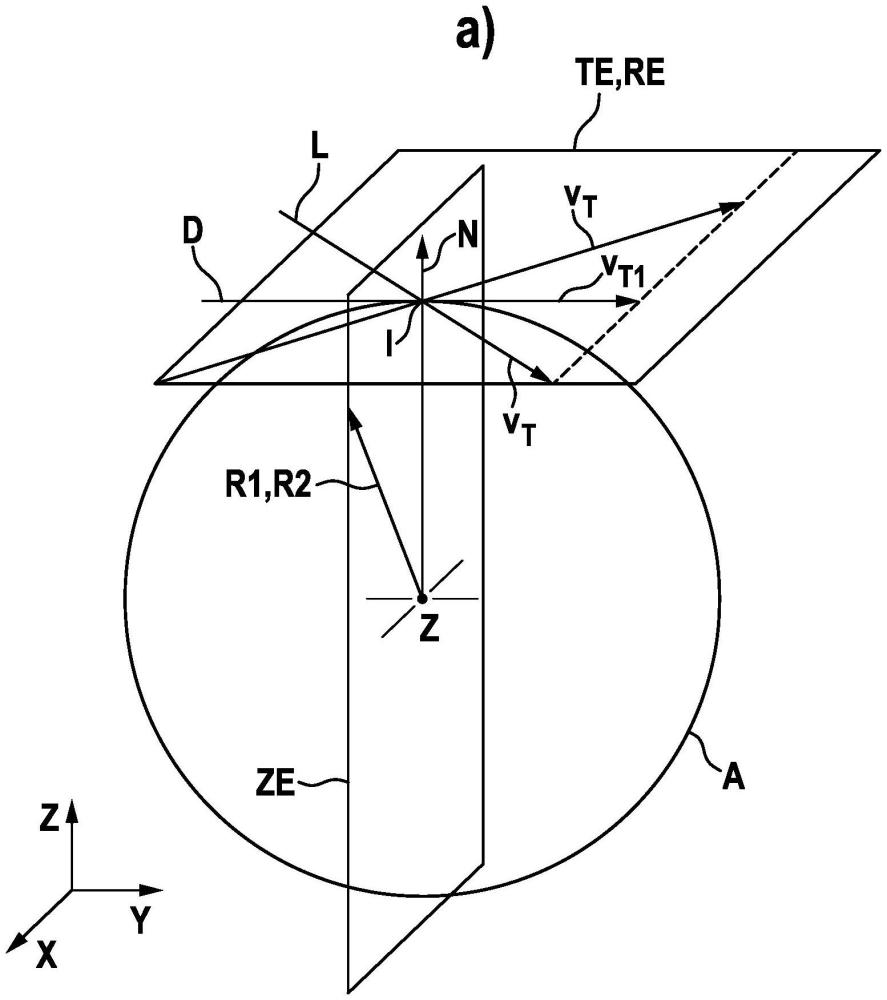
40、根据一种实施方式,速度分量由在激光信号的通过眼睛的相应的组成部分定义的反射平面内的切向速度分量定义,其中,该切向速度分量平行于激光信号的方向延伸。
41、由此可以实现如下技术优点:可以实现模型简化,其中将待考虑的速度分量限制为切向速度分量。由此,减小待执行的计算的复杂性,并且与此相关地,减小执行根据本发明的方法所需要的计算能力或执行持续时间。
42、根据一种实施方式,几何结构眼睛模型包括第一速度模型、第二速度模型和第三速度模型,其中,第一速度模型为在视网膜上反射的激光信号描述速度分量与围绕旋转轴线的旋转速度之间的相关性,其中,第二速度模型为在虹膜上反射的激光信号描述速度分量与围绕旋转轴线的旋转速度之间的相关性,并且其中,第三速度模型为在巩膜上反射的激光信号描述速度分量与围绕旋转轴线的旋转速度之间的相关性。
43、由此可以实现如下技术优点:基于几何结构眼睛模型能够实现对眼睛位置的精确的确定,在该几何结构眼睛模型中,根据激光信号到眼睛的相应定义的组成部分上的入射点(auftreffpunkt),可以考虑相应的眼睛组成部分的特性,其方式是,对于相应的眼睛组成部分视网膜、虹膜、巩膜,将相应的速度模型作为几何结构眼睛模型的子模型用于确定旋转速度。
44、根据一种实施方式,在第一速度模型中,借助球状成形的面来近似视网膜的形状,其中,在第二速度模型中,借助平坦成形的面来近似虹膜的形状,并且其中,在第三速度模型中,借助球状成形的面来近似巩膜的形状。
45、由此可以实现如下技术优点:通过在几何结构方面简单地近似各个眼睛组成部分视网膜、虹膜、巩膜的具有面的构型,能够实现对第一至第三速度模型的进一步简化并且与此相关地能够实现包括减少所需要的计算能力在内的对根据本发明的方法的进一步加速。
46、根据一种实施方式,适用于第一速度模型和第三速度模型的是:
47、vt=(i×q·ω)·l,
48、其中,i是激光信号在眼睛组成部分上的入射点的矢量表示,q是眼睛的旋转轴线的矢量表示,l是激光信号的矢量表示,ω是围绕旋转轴线的角速度,并且其中,适用于所述第二速度模型的是:
49、
50、其中,δd是在虹膜上的距离增量并且vts1,vts2是在时间点t1、t2求取出的两个切向速度分量。
51、由此可以实现如下技术优点:在考虑眼睛组成部分视网膜、虹膜、巩膜的几何结构特性的情况下,能够实现对旋转速度的精确的确定。
52、根据一种实施方式,几何结构眼睛模型包括第一间距模型、第二间距模型和第三间距模型,其中,第一间距模型描述激光反馈干涉测量单元与视网膜之间的间距,其中,第二间距模型描述激光反馈干涉测量单元与虹膜之间的间距,其中,第三间距模型描述激光反馈干涉测量单元与巩膜之间的间距,其中,适用于第一间距模型的是:d=dls(r视网膜),其中,d是间距分量,s是激光反馈干涉测量单元的位置,l是激光信号,并且r视网膜是视网膜与眼睛中心之间的径向间距,其中,适用于第三间距模型的是:d=dls(r巩膜),其中,r巩膜是巩膜与眼睛中心之间的径向间距,并且其中,适用于第二间距模型的是:其中,rp是虹膜的旋转矩阵,e0是从眼睛中心到虹膜的单位矢量,e是虹膜面的单位矢量,并且l是激光信号的矢量表示。
53、由此可以实现如下技术优点:基于间距模型能够实现将眼睛组成部分精确地辨认为视网膜、虹膜、巩膜,在所述间距模型中,在考虑相应的眼睛组成部分的几何结构特性的情况下,根据几何结构模型,能够确定相应的间距分量。在此,基于几何结构模型的几何结构特性,简化间距模型,使得能够实现精确的且同时能够简单执行的并且计算功率高效的间距确定。
54、根据一种实施方式,求取出的眼睛位置是如下未来的眼睛位置:所述眼睛基于所确定的旋转速度在预确定的未来的时间点将占据所述未来的眼睛位置。
55、由此可以实现如下技术优点:不仅能够确定在干涉测量的时间点存在的当前眼睛位置,还能够确定未来的眼睛位置,所述未来的眼睛位置将在完成目前存在的眼睛运动之后被占据。
56、根据一种实施方式,至少两个激光干涉单元相对于眼睛这样布置,使得能够确定围绕相对于彼此成直角地布置的至少两个旋转轴线的眼睛旋转运动,并且其中,通过眼睛围绕相对于彼此成直角地布置的至少两个旋转轴线的旋转运动,能够描述人类眼睛的每个在生理上可能的眼睛位置。
57、由此可以实现如下技术优点:可以考虑人类眼睛围绕彼此垂直地布置的两个旋转轴线的完整的眼睛运动,并且因此可以实现对眼睛位置的精确的确定。
58、根据本发明的第二方面,提供一种计算单元,该计算单元设立为用于实施根据上述实施方式中任一种实施方式所述的用于确定眼睛位置的方法。
59、根据本发明的第三方面,提供一种计算机程序产品,所述计算机程序产品包括指令,所述指令在通过数据处理单元执行该程序时促使该数据处理单元实施根据上述实施方式中任一种实施方式所述的用于确定眼睛位置的方法。
- 还没有人留言评论。精彩留言会获得点赞!