光学镜头及激光雷达的制作方法
本发明涉及一种光学镜头及激光雷达,应用在激光雷达镜头和激光雷达的生产领域。
背景技术:
1、激光雷达的应用是先向目标发射探测信号,然后通过激光雷达探测器前方设置的接收镜组将反射回的反射光聚焦到探测器上,再将反射光转为反射信号,将该反射信号与发射信号进行比较并作适当处理后,就可获得目标的有关信息,如目标距离、高度、速度等参数,从而对目标进行探测、跟踪、识别。目前使用在激光雷达上的光学镜头普遍存在视场角较小、靶面不够大、畸变较大等缺点。例如,cn202211167735.4公开的一种高清晰度光学镜头及高性能激光雷达,其视场角为77.3°,畸变为-19.3%,靶面为φ8mm;cn202222121872.6公开的光学镜头以及激光雷达,其视场畸变为-60%,靶面为φ7.55mm。
2、因此,提供一种同时兼具视场角大、靶面大、畸变低的光学镜头及激光雷达己成为当务之亟。
技术实现思路
1、为了克服目前使用在激光雷达长的光学镜头普遍存在视场角较小、靶面不够大、畸变较大等缺点,本发明提供一种光学镜头及激光雷达,通过优选限定光焦度、各表面凹凸形状、空气间隙、曲率半径、半直径、中心厚度、材质、折射率、阿贝系数等参数,并配合限定第一透镜和第六透镜均为非球面透镜,具有能同时兼具视场角大、靶面大、畸变低的优点。
2、本发明的技术方案如下:
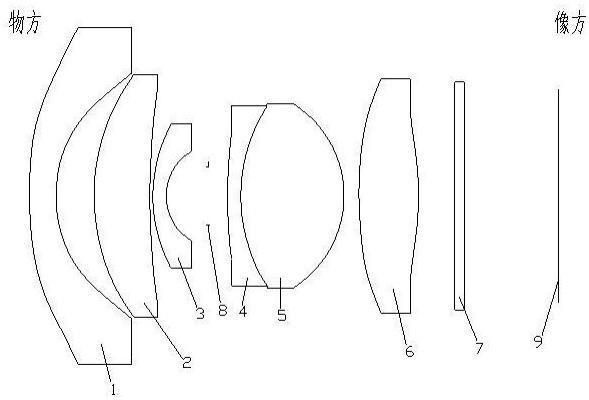
3、一种光学镜头,包括由物方至像方方向依次设置的第一透镜、第二透镜、第三透镜、光阑、第四透镜、第五透镜以及第六透镜;其中,第四透镜与第五透镜组成双胶合透镜,其余透镜均为单透镜;
4、第一透镜为负光焦度透镜,第一透镜的第一表面为凸面,第二表面为凹面,
5、第二透镜为正光焦度透镜,第二透镜的第一表面为凸面,第二表面为凹面,
6、第三透镜为负光焦度透镜,第三透镜的第一表面为凸面,第二表面为凹面,
7、第四透镜为负光焦度透镜,第四透镜的第一表面为凸面,第二表面为凹面,
8、第五透镜为正光焦度透镜,第五透镜的第一表面为凸面,第二表面为凸面,
9、第六透镜为正光焦度透镜,第六透镜的第一表面为凸面,第二表面为凸面;
10、第一透镜与第二透镜的空气间隙为0.891~4.898mm,
11、第二透镜与第三透镜的空气间隙为0.1~0.231mm,
12、第三透镜与光阑的空气间隙为3.17~4.381mm,
13、光阑与第四透镜的空气间隙为1.141~1.659mm,
14、第五透镜与第六透镜的空气间隙为4.369~5.687mm;
15、第一透镜的第一表面曲率半径为37.373~40.004mm,第二表面曲率半径为10.339~11.195mm,
16、第二透镜的第一表面曲率半径为11.725~15.743mm,第二表面曲率半径为31.455~58.73mm,
17、第三透镜的第一表面曲率半径为10.825~19.682mm,第二表面曲率半径为3.709~3.95mm,
18、第四透镜的第一表面曲率半径为28.137~48.907mm,第二表面曲率半径为12.586~12.794mm,
19、第五透镜的第一表面曲率半径为12.568~12.794mm,第二表面曲率半径为-7.116~-8.235mm,
20、第六透镜的第一表面曲率半径为30.325~31.654mm,第二表面曲率半径为-19.185~-21.740mm;
21、第一透镜的第一表面半直径为10.505~17.04mm,第二表面半直径为7.540~9.453mm,
22、第二透镜的第一表面半直径为7.354~9.188mm,第二表面半直径为8mm,
23、第三透镜的第一表面半直径为5.030~5.432mm,第二表面半直径为3.044~3.4mm,
24、第四透镜的第一表面半直径为4.9mm,第二表面半直径为6.8mm,
25、第五透镜的第一表面半直径为6.8mm,第二表面半直径为6.822~7.111mm,
26、第六透镜的第一表面半直径为8.398~9.225mm,第二表面半直径为8.257~9.070mm;
27、第一透镜的中心厚度为1.652~2.103mm,
28、第二透镜的中心厚度为2.312~4.22mm,
29、第三透镜的中心厚度为1~1.634mm,
30、第四透镜的中心厚度为1~1.794mm,
31、第五透镜的中心厚度为4.787~7.8mm,
32、第六透镜的中心厚度为4.114~4.5mm;
33、所述第一透镜和第六透镜均为非球面透镜。
34、本技术的光学镜头通过优选限定光焦度、各表面凹凸形状、空气间隙、曲率半径、半直径、中心厚度、材质、折射率、阿贝系数等参数,并配合限定第一透镜和第六透镜均为非球面透镜,具有能同时兼具视场角大、靶面大、畸变低的优点。该光学镜头焦距6.28mm±10%mm,最大视场角fov可达105°的大角度视场信息,且有1英寸的大靶面(对应的像面尺寸为φ16mm),光圈f数2.0±5%,半像高可达8.1mm,光学系统中采用双片模压非球,让系统实现40mm短ttl下具备<|1.2|%的超低光学畸变,极大程度上缩短了镜头的整体尺寸并获取高精度的云图。所述光学镜头使用时设置在探测器前。
35、第一透镜为玻璃材料:1.55<n<1.75,45<vd<55,
36、第二透镜为玻璃材料:1.80<n<2.10,15<vd<25,
37、第三透镜为玻璃材料:1.55<n<1.75,55<vd<65,
38、第四透镜为玻璃材料:1.80<n<2.10,15<vd<25,
39、第五透镜为玻璃材料:1.55<n<1.75,60<vd<70,
40、第六透镜为玻璃材料:1.70<n<1.95,35<vd<45,
41、其中,n为折射率,vd为阿贝系数。
42、所述光学镜头设置在探测器前方,探测器上设有平面透镜,该平面透镜位于探测器与第六透镜之间,第六透镜与平面透镜的空气间隙为1~3mm。
43、该平面透镜为保护透镜,可以起到保护探测器的作用。
44、所述平面透镜为玻璃材料:1.50<n<1.70,55<vd<65,其中,n为折射率,vd为阿贝系数。
45、优选的平面透镜材质、折射率和阿贝系数能进一步保证光学镜头的大角度、大靶面、低畸变成像。
46、一种激光雷达,包括上述的光学镜头。
47、带有本技术特别设计光学镜头的激光雷达,能具备大角度、大靶面、低畸变成像的优点。该激光雷达能接收对从目标返回的波长0.850um-0.950um的激光反射光点,并构建4d点云成像,从而获得周围的环境信息。
48、与现有技术相比,本发明申请具有以下优点:
49、1)本技术的光学镜头通过优选限定光焦度、各表面凹凸形状、空气间隙、曲率半径、半直径、中心厚度、材质、折射率、阿贝系数等参数,并配合限定第一透镜和第六透镜均为非球面透镜,具有能同时兼具视场角大、靶面大、畸变低的优点;
50、2)本技术的激光雷达能具备大角度、大靶面、低畸变成像的优点,该激光雷达能接收对从目标返回的波长0.850um-0.950um的激光反射光点,并构建4d点云成像,从而获得周围的环境信息。
- 还没有人留言评论。精彩留言会获得点赞!