一种拼接式空间望远镜全局装调方法、装置、设备及介质
本发明涉及空间望远镜的,具体提供一种拼接式空间望远镜全局装调方法、装置、设备及介质。
背景技术:
1、大口径空间望远镜是探究重大前沿天文科学问题的一类重要的天文观测仪器,随着各方面探测需求的不断延伸,空间望远镜的口径越来越大。为打破火箭运载能力的限制,主镜采用“拼接式”的结构形式是大口径空间望远镜发展的重要方向之一。
2、主镜采用“拼接式”的结构形式,有效较低了空间望远镜上行体积,但增加了空间望远镜在轨校正自由度的数量,即增加了像质在轨校正的难度。目前,“拼接式”空间望远镜主要通过配备波前传感与控制模块获取各类含有反射镜失调信息的图像,并按照像点识别(含像点搜寻)、像点排列与全局调校、共焦、粗共相及精共相的顺序,分阶段解算各反射镜(拼接子镜和次镜)在轨的调整量。
3、在上述调整顺序中,全局调校阶段波前信息有限(单视场波前信息)、调整维度多、调整范围大,现有技术不能利用有限的波前信息实现各个拼接子镜位姿、曲率半径的调整以及次镜位姿的调整,因此阻碍了大口径空间望远镜的发展与应用。
技术实现思路
1、本发明为解决上述问题,提供了一种拼接式空间望远镜全局装调方法、装置、设备及介质。
2、第一方面,本发明实施例提供一种拼接式空间望远镜全局装调方法,其包括:
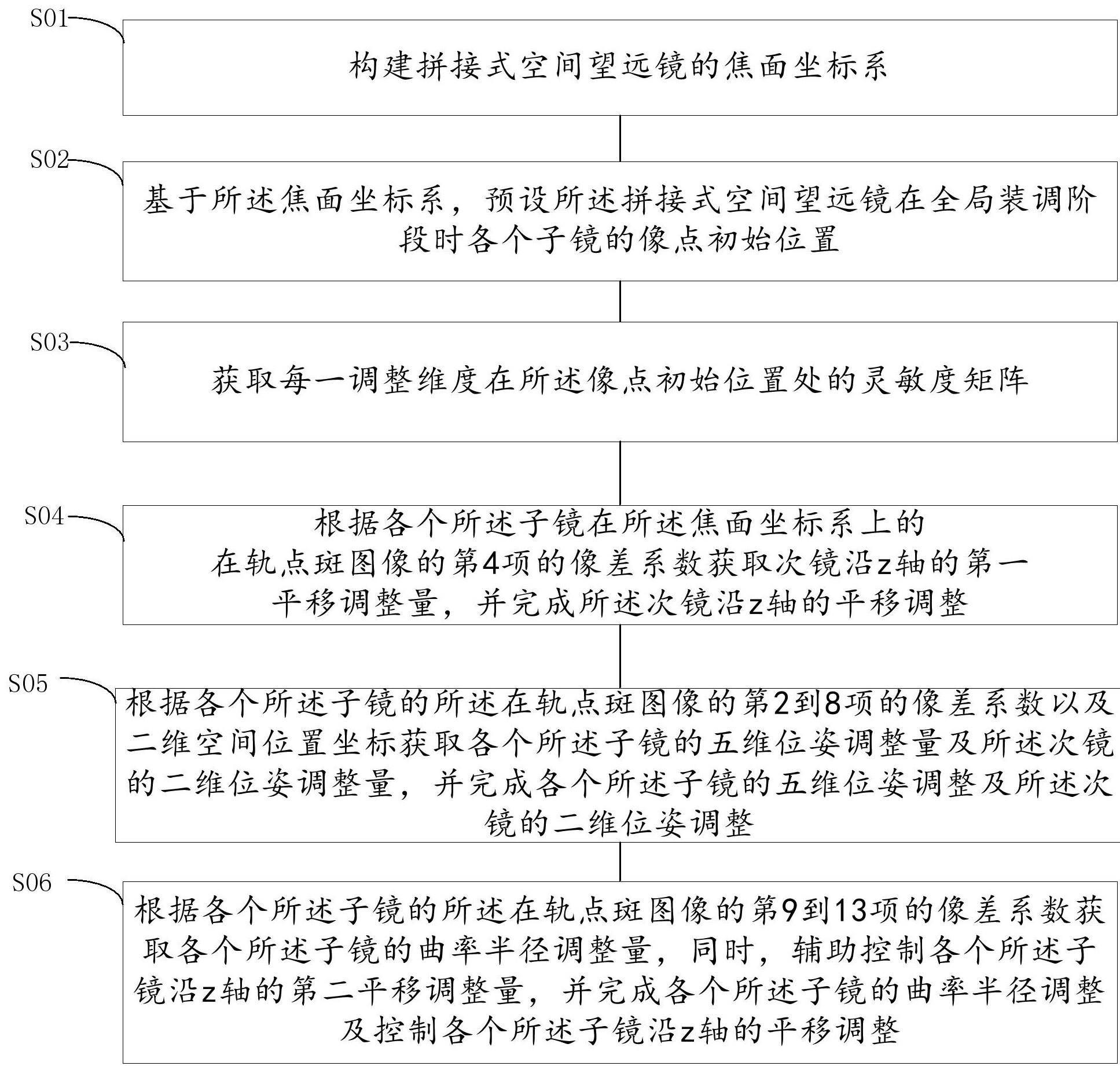
3、构建拼接式空间望远镜的焦面坐标系;
4、基于所述焦面坐标系,预设所述拼接式空间望远镜在全局装调阶段时各个子镜的像点初始位置;
5、获取每一调整维度在所述像点初始位置处的灵敏度矩阵;
6、根据各个所述子镜在所述焦面坐标系上的在轨点斑图像的第4项的像差系数获取次镜沿z轴的第一平移调整量,并完成所述次镜沿z轴的平移调整;
7、根据各个所述子镜的所述在轨点斑图像的第2到8项的像差系数以及二维空间位置坐标获取各个所述子镜的五维位姿调整量及所述次镜的二维位姿调整量,并完成各个所述子镜的五维位姿调整及所述次镜的二维位姿调整;
8、根据各个所述子镜的所述在轨点斑图像的第9到13项的像差系数获取各个所述子镜的曲率半径调整量,同时,辅助控制各个所述子镜沿z轴的第二平移调整量,并完成各个所述子镜的曲率半径调整及控制各个所述子镜沿z轴的平移调整。
9、优选地,在构建拼接式空间望远镜的焦面坐标系中,包括:
10、在所述拼接式空间望远镜的标称状态下,中心视场恒星点斑所在像元为坐标原点构建所述拼接式空间望远镜的所述焦面坐标系,x轴与y轴坐标范围为:
11、(1)
12、式中,为x轴方向焦面像元数,为y轴方向焦面像元数,和分别为x方向和y方向焦面像元尺寸。
13、优选地,在基于所述焦面坐标系,预设所述拼接式空间望远镜在全局装调阶段时各个子镜的像点初始位置中,具体包括:
14、基于所述焦面坐标系,通过主动控制每一所述子镜绕x轴倾斜和绕y轴倾斜,以到达每一所述子镜的所述像点初始位置。
15、优选地,在获取每一调整维度在所述像点初始位置处的灵敏度矩阵中,包括:
16、通过fringe zernike像差系数进行分类,计算公式为:
17、(2)
18、式中,为针对编号为的子镜的第项fringe zernike系数()对第个失调量()的导数;
19、其中,i为第2项fringe zernike系数到第13项fringe zernike系数,为失调量,包括每一所述子镜的六维在轨调整维度:沿x轴偏心()、沿y轴偏心()、绕x轴倾斜()、绕y轴倾斜()、沿z轴的平移误差()及子镜曲率半径调整量();次镜的五维在轨调整维度:沿x轴偏心()、沿y轴偏心()、绕x轴倾斜()、绕y轴倾斜()以及沿z轴的平移();
20、通过光学集成仿真软件获取各个所述子镜的位置坐标对不同失调量的敏感度,计算公式为:
21、(3)
22、式中,为针对编号为的子镜,x方向位置坐标对第个失调量()的导数,为针对编号为的子镜,y方向位置坐标对第个失调量()的导数。
23、优选地,在根据各个所述子镜在所述焦面坐标系上的在轨点斑图像的第4项像差系数求取次镜沿z轴的所述第一平移调整量中,包括:
24、在所述焦面坐标系上识别出各个所述子镜对应的恒星点斑,并确定此时所述恒星点斑在所述焦面坐标系上的坐标;
25、通过波前传感算法求取各个所述子镜的波前像差,像差采用fringe zernike像差系数进行表征,确定次镜沿z轴的所述第一平移调整量,计算公式为:
26、(4)
27、式中,为所述次镜沿z轴的所述第一平移调整量,为矩阵求逆,:编号为的子镜的第4项fringe zernike像差对的敏感度,其中所述敏感度为导数,:编号为的子镜失调状态下第4项fringe zernike像差值与所述像点初始位置处第4项fringe zernike像差值之间的差。
28、优选地,在根据各个所述子镜的所述在轨点斑图像的第2到8项像差系数以及二维空间位置坐标获取各个所述子镜的五维位姿调整量以及所述次镜的二维位姿调整量中,包括:
29、通过波前传感算法求取各个所述子镜的第2到8项fringe zernike像差系数,同时获取各个所述子镜在所述焦面坐标系上x和y方向的坐标,然后通过如下关系式求取各个所述子镜的五维位姿调整量和所述次镜的二维位姿调整量的值:
30、(5)
31、式中,等式左侧为各个所述子镜的位姿调整量和所述次镜的倾斜维度调整量,调整量总数为所述子镜的个数×5(子镜的五维位姿调整量)+2(次镜的二维位姿调整量);
32、为针对编号为的子镜的第项zernike系数()对第个失调量()的导数,元素总数为7(fringe zernike像差系数第2到8项,7个)×(所述子镜的个数×5(子镜的五维位姿调整量)+2(次镜的二维位姿调整量));
33、为编号为的子镜的第项fringe zernike像差系数与标定位置处的第项fringe zernike像差系数之间的差,元素总数为所述子镜的个数×7(fringe zernike像差系数第2到8项,7个);
34、为编号为的子镜对应的点斑在焦面x方向位置坐标与标定位置处x方向位置坐标之间的差,其中元素数量与所述子镜的数量一致;
35、为编号为的子镜对应的点斑在焦面y方向位置坐标与标定位置处x方向位置坐标之间的差,其中元素数量与所述子镜的数量一致。
36、优选地,在根据各个所述子镜的所述在轨点斑图像的第9到13项的像差系数获取各个所述子镜的曲率半径调整量,同时,辅助控制各个所述子镜沿z轴的第二平移调整量,并完成各个所述子镜的曲率半径调整及控制各个所述子镜沿z轴的平移调整中,包括:
37、通过波前传感算法求取各个所述子镜的第9到13项fringe zernike像差系数,然后通过如下关系式求取各个所述子镜的曲率半径调整量及沿z轴的第二平移调整量的值:
38、(6)
39、式中,等式左侧为各个所述子镜的曲率半径调整量及沿z轴的第二平移调整量,为权重矩阵,控制像差系数及调整量贡献值,该矩阵根据实际空间望远镜进行调整
40、式中,:针对编号为的子镜的第9项fringe zernike系数()对所述子镜的曲率半径的导数;
41、:针对编号为的子镜的第9项fringe zernike系数()对所述子镜沿z轴平移的导数。
42、第二方面,本发明实施例中提供一种拼接式空间望远镜全局装调装置,其包括:
43、构建单元:用于构建拼接式空间望远镜的焦面坐标系;
44、预设单元:用于基于所述焦面坐标系,预设所述拼接式空间望远镜在全局装调阶段时各个子镜的像点初始位置;
45、第一获取单元:用于获取每一调整维度在所述像点初始位置处的灵敏度矩阵;
46、第二获取单元:用于根据各个所述子镜在所述焦面坐标系上的在轨点斑图像的第4项的像差系数获取次镜沿z轴的第一平移调整量,并完成所述次镜沿z轴的平移调整;
47、第三获取单元:用于根据各个所述子镜的所述在轨点斑图像的第2到8项的像差系数以及二维空间位置坐标获取各个所述子镜的五维位姿调整量及所述次镜的二维位姿调整量,并完成各个所述子镜的五维位姿调整及所述次镜的二维位姿调整;
48、第四获取单元:用于根据各个所述子镜的所述在轨点斑图像的第9到13项的像差系数获取各个所述子镜的曲率半径调整量,同时,辅助控制各个所述子镜沿z轴的第二平移调整量,并完成各个所述子镜的曲率半径调整及控制各个所述子镜沿z轴的平移调整。
49、第三方面,本发明实施例中提供一种计算机设备,其包括:
50、至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的拼接式空间望远镜全局装调方法。
51、第四方面,一种存储有计算机指令的非瞬时计算机可读存储介质,所述计算机指令用于使所述计算机执行上述的拼接式空间望远镜全局装调方法。
52、与现有技术相比,本发明能够取得如下有益效果:
53、本发明提出的一种拼接式空间望远镜全局装调方法、装置、设备及介质,包括:构建拼接式空间望远镜的焦面坐标系;基于所述焦面坐标系,预设所述拼接式空间望远镜在全局装调阶段时各个子镜的像点初始位置;获取每一调整维度在所述像点初始位置处的灵敏度矩阵;根据各个所述子镜在所述焦面坐标系上的在轨点斑图像的第4项的像差系数获取次镜沿z轴的第一平移调整量,并完成所述次镜沿z轴的平移调整; 根据各个所述子镜的所述在轨点斑图像的第2到8项的像差系数以及二维空间位置坐标获取各个所述子镜的五维位姿调整量及所述次镜的二维位姿调整量,并完成各个所述子镜的五维位姿调整及所述次镜的二维位姿调整;根据各个所述子镜的所述在轨点斑图像的第9到13项的像差系数获取各个所述子镜的曲率半径调整量,同时,辅助控制各个所述子镜沿z轴的第二平移调整量,并完成各个所述子镜的曲率半径调整及控制各个所述子镜沿z轴的平移调整。因此,通过构建不同类型波像差系数与各个失调量之间的一阶线性关系,分阶段求取不同失调量并作相应调整,可有效降低失调像差耦合关系复杂对全局调校阶段调整量求解精度的影响,因此有利于大口径空间望远镜的发展与应用。
- 还没有人留言评论。精彩留言会获得点赞!