一种可双侧工作牛头刨床的制作方法
1.本发明涉及一种机床设备,更具体的说是一种可双侧工作牛头刨床。
背景技术:
2.随着我国制造业发展,国内对于机床设备的要求更高,传统牛头刨床只在进给时工作返程不工作,生产效率较低,因此设计了这种可双侧工作牛头刨床。
技术实现要素:
3.本发明主要解决的技术问题是提供一种可双侧工作牛头刨床,设备能够双侧加工金属表面,设备能够调节刀具行程与倾角,设备能够夹持物料,设备能够驱动物料自动行进。
4.为解决上述技术问题,本发明涉及一种机床设备,更具体的说是一种可双侧工作牛头刨床,包括切削机构、自动行进夹持机构、动力机构,设备能够双侧加工金属表面,设备能够调节刀具行程与倾角,设备能够夹持物料,设备能够驱动物料自动行进。
5.切削机构与动力机构相连,自动行进夹持机构与动力机构相连。
6.作为本技术方案的进一步优化,本发明一种可双侧工作牛头刨床所述的切削机构包括滑枕、两个支撑块、两个支撑块紧固螺栓、滑枕导轨、两个防干涉槽、滑枕受力杆、两个支撑块转轴、两个螺孔、两个支撑块倾斜调节腔、两个转轴、两个刀具支撑块、两个刀具、两个刀具安装块、两个刀具紧固螺栓,滑枕与两个支撑块相铰接,滑枕与滑枕导轨滑动连接,滑枕设有滑枕受力杆,滑枕设有两个支撑块转轴,滑枕设有两个螺孔,两个支撑块分别设有两个支撑块倾斜调节腔,两个支撑块分别设有两个转轴,两个支撑块分别与两个刀具支撑块相接触,两个支撑块紧固螺栓分别与两个螺孔螺纹连接,两个支撑块紧固螺栓分别与两个支撑块倾斜调节腔相接触,滑枕导轨设有两个防干涉槽,两个转轴分别与两个刀具支撑块相铰接,两个刀具支撑块分别与两个刀具相接触,两个刀具支撑块分别与两个刀具安装块相连,两个刀具分别与两个刀具紧固螺栓相接触,两个刀具安装块分别与两个刀具紧固螺栓螺纹连接。
7.作为本技术方案的进一步优化,本发明一种可双侧工作牛头刨床自动行进夹持机构包括多个支撑杆、两个夹持导轨平台、两个夹具紧固螺杆、两个夹具、两个夹具活动端、多个支撑座一、两个槽轮、两个传动蜗杆、两个传动蜗轮、两个传动轴一、两个支撑座二、两个齿轮一、两个齿条、多个夹具滑槽、多个夹具滑块、两个活动端滑槽、两个活动端受力腔,多个支撑杆分别与两个夹持导轨平台相连,两个夹持导轨平台分别设有多个夹具滑槽,两个夹具紧固螺杆分别与两个夹具螺纹连接,两个夹具紧固螺杆分别与两个夹具活动端相接触,两个夹具紧固螺杆分别与两个活动端受力腔相接触,两个夹具分别设有两个齿条,两个夹具分别设有多个夹具滑块,两个夹具分别设有两个活动端滑槽,两个夹具活动端分别与两个活动端滑槽滑动连接,两个夹具活动端分别设有两个活动端受力腔,多个支撑座一分别与两个传动蜗杆转动连接,两个槽轮分别与两个传动蜗杆相连,两个传动蜗杆分别与两
个传动蜗轮相啮合,两个传动蜗轮分别与两个传动轴一相连,两个传动轴一分别与两个支撑座二转动连接,两个传动轴一分别与两个齿轮一相连,两个齿轮一分别与两个齿条相啮合,多个夹具滑块分别设置在多个夹具滑槽内。
8.作为本技术方案的进一步优化,本发明一种可双侧工作牛头刨床所述的动力机构包括电机、齿轮二、齿轮三、传动轴二、支撑座三、两个主动拨盘、两个支撑座四、两个传动轴三、两个支撑座五、链轮一、链条一、链轮二、支撑座六、链轮三、链条二、链轮四、传动杆、传动转轮、两个支撑台、两个连杆转轴支撑台、多个高度调节螺栓、滑块一、通孔一、传动连杆、通孔二、滑块二、传动杆转轴,电机与齿轮二转动连接,齿轮二、齿轮三相啮合,齿轮三与传动轴二相连,传动轴二与支撑座三转动连接,传动轴二与链轮一相连,传动轴二与支撑座六转动连接,传动轴二与链轮三相连,传动轴二与传动转轮相连,两个主动拨盘分别与两个传动轴三相连,两个支撑座四分别与两个传动轴三转动连接,两个传动轴三分别与两个支撑座五转动连接,两个传动轴三分别与链轮二、链轮四相连,链轮一与链条一相啮合,链条一与链轮二相啮合,链轮三与链条二相啮合,链条二与链轮四相啮合,传动杆与传动转轮相连,传动杆与滑块一相铰接,两个支撑台分别与多个高度调节螺栓转动连接,多个高度调节螺栓分别与两个连杆转轴支撑台螺纹连接,两个连杆转轴支撑台与传动杆转轴相铰接,滑块一设置在通孔一内,传动连杆设有通孔一、通孔二,滑块二设置在通孔二内,滑块二与传动杆转轴相铰接,滑枕与传动连杆相铰接,滑枕导轨与两个支撑台相连,两个槽轮分别与两个主动拨盘相接触。
9.1.作为本技术方案的进一步优化,本发明一种可双侧工作牛头刨床所述的两个夹具紧固螺杆底端设有圆台,当正反两向旋转时圆台与两个活动端受力腔水平方向接触受力,垂直方向不接触。
10.本发明一种可双侧工作牛头刨床的有益效果为:
11.本发明一种可双侧工作牛头刨床,设备能够双侧加工金属表面,设备能够调节刀具行程与倾角,设备能够夹持物料,设备能够驱动物料自动行进。
附图说明
12.下面结合附图和具体实施方法对本发明做进一步详细的说明。
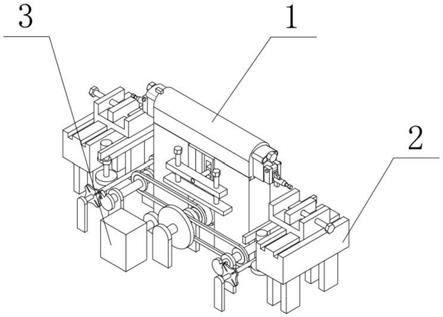
13.图1为本发明一种可双侧工作牛头刨床的结构示意图一。
14.图2为本发明一种可双侧工作牛头刨床的结构示意图二。
15.图3为本发明一种可双侧工作牛头刨床的结构示意图三。
16.图4为本发明一种可双侧工作牛头刨床的切削机构1的结构示意图一。
17.图5为本发明一种可双侧工作牛头刨床的切削机构1的结构示意图二。
18.图6为本发明一种可双侧工作牛头刨床的切削机构1的结构示意图三。
19.图7为本发明一种可双侧工作牛头刨床的自动行进夹持机构2的结构示意图一。
20.图8为本发明一种可双侧工作牛头刨床的自动行进夹持机构2的结构示意图二。
21.图9为本发明一种可双侧工作牛头刨床的自动行进夹持机构2的结构示意图三。
22.图10为本发明一种可双侧工作牛头刨床的动力机构3的结构示意图一。
23.图11为本发明一种可双侧工作牛头刨床的动力机构3的结构示意图二。
24.图12为本发明一种可双侧工作牛头刨床的动力机构3的结构示意图三。
25.图13为本发明一种可双侧工作牛头刨床的动力机构3的结构示意图四。
26.图14为本发明一种可双侧工作牛头刨床的动力机构3的结构示意图五。
27.图15为本发明一种可双侧工作牛头刨床的动力机构3的结构示意图六。
28.图中:切削机构1;滑枕1
‑
1;支撑块1
‑
2;支撑块紧固螺栓1
‑
3;滑枕导轨1
‑
4;防干涉槽1
‑
5;滑枕受力杆1
‑
6;支撑块转轴1
‑
7;螺孔1
‑
8;支撑块倾斜调节腔1
‑
9;转轴1
‑
10;刀具支撑块1
‑
11;刀具1
‑
12;刀具安装块1
‑
13;刀具紧固螺栓1
‑
14;自动行进夹持机构2;支撑杆2
‑
1;夹持导轨平台2
‑
2;夹具紧固螺杆2
‑
3;夹具2
‑
4;夹具活动端2
‑
5;支撑座一2
‑
6;槽轮2
‑
7;传动蜗杆2
‑
8;传动蜗轮2
‑
9;传动轴一2
‑
10;支撑座二2
‑
11;齿轮一2
‑
12;齿条2
‑
13;夹具滑槽2
‑
14;夹具滑块2
‑
15;活动端滑槽2
‑
16;活动端受力腔2
‑
17;动力机构3;电机3
‑
1;齿轮二3
‑
2;齿轮三3
‑
3;传动轴二3
‑
4;支撑座三3
‑
5;主动拨盘3
‑
6;支撑座四3
‑
7;传动轴三3
‑
8;支撑座五3
‑
9;链轮一3
‑
10;链条一3
‑
11;链轮二3
‑
12;支撑座六3
‑
13;链轮三3
‑
14;链条二3
‑
15;链轮四3
‑
16;传动杆3
‑
17;传动转轮3
‑
18;支撑台3
‑
19;连杆转轴支撑台3
‑
20;高度调节螺栓3
‑
21;滑块一3
‑
22;通孔一3
‑
23;传动连杆3
‑
24;通孔二3
‑
25;滑块二3
‑
26;传动杆转轴3
‑
27。
具体实施方式
29.具体实施方式一:
30.下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15说明本实施方式,本发明涉及一种机床设备,更具体的说是一种可双侧工作牛头刨床,包括切削机构1、自动行进夹持机构2、动力机构3,设备能够双侧加工金属表面,设备能够调节刀具行程与倾角,设备能够夹持物料,设备能够驱动物料自动行进。
31.切削机构1与动力机构3相连,自动行进夹持机构2与动力机构3相连。
32.具体实施方式二:
33.下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15说明本实施方式,本实施方式对实施方式一作进一步说明,所述的切削机构1包括滑枕1
‑
1、两个支撑块1
‑
2、两个支撑块紧固螺栓1
‑
3、滑枕导轨1
‑
4、两个防干涉槽1
‑
5、滑枕受力杆1
‑
6、两个支撑块转轴1
‑
7、两个螺孔1
‑
8、两个支撑块倾斜调节腔1
‑
9、两个转轴1
‑
10、两个刀具支撑块1
‑
11、两个刀具1
‑
12、两个刀具安装块1
‑
13、两个刀具紧固螺栓1
‑
14,滑枕1
‑
1与两个支撑块1
‑
2相铰接,滑枕1
‑
1与滑枕导轨1
‑
4滑动连接,滑枕1
‑
1设有滑枕受力杆1
‑
6,滑枕1
‑
1设有两个支撑块转轴1
‑
7,滑枕1
‑
1设有两个螺孔1
‑
8,两个支撑块1
‑
2分别设有两个支撑块倾斜调节腔1
‑
9,两个支撑块1
‑
2分别设有两个转轴1
‑
10,两个支撑块1
‑
2分别与两个刀具支撑块1
‑
11相接触,两个支撑块紧固螺栓1
‑
3分别与两个螺孔1
‑
8螺纹连接,两个支撑块紧固螺栓1
‑
3分别与两个支撑块倾斜调节腔1
‑
9相接触,滑枕导轨1
‑
4设有两个防干涉槽1
‑
5,两个转轴1
‑
10分别与两个刀具支撑块1
‑
11相铰接,两个刀具支撑块1
‑
11分别与两个刀具1
‑
12相接触,两个刀具支撑块1
‑
11分别与两个刀具安装块1
‑
13相连,两个刀具1
‑
12分别与两个刀具紧固螺栓1
‑
14相接触,两个刀具安装块1
‑
13分别与两个刀具紧固螺栓1
‑
14螺纹连接,工作时电机3
‑
1带动齿轮二3
‑
2转动,齿轮二3
‑
2带动齿轮三3
‑
3转动,齿轮三3
‑
3带动传动轴二3
‑
4转动,传动轴二3
‑
4带动传动转轮3
‑
18转动,传动转轮3
‑
18带动传动杆3
‑
17运动,传动杆3
‑
17带动滑块一3
‑
22在通孔一3
‑
23内运动,滑块一3
‑
22带动传动连杆3
‑
24绕传动杆
转轴3
‑
27摆动,传动连杆3
‑
24带动滑枕受力杆1
‑
6运动,滑枕受力杆1
‑
6带动滑枕1
‑
1在滑枕导轨1
‑
4上滑动,滑枕1
‑
1带动两个支撑块1
‑
2运动,两个支撑块1
‑
2运动带动两个刀具支撑块1
‑
11运动,两个刀具支撑块1
‑
11带动两个刀具1
‑
12运动,使设备具备双侧加工金属表面功能,需要调节刀具倾角时反转两个支撑块紧固螺栓1
‑
3,使两个支撑块1
‑
2可自由绕两个支撑块转轴1
‑
7摆动,调整完成后再正转紧固螺栓1
‑
3紧固,调节刀具行程时旋转多个高度调节螺栓3
‑
21带动两个连杆转轴支撑台3
‑
20运动,两个连杆转轴支撑台3
‑
20带动传动杆转轴3
‑
27运动,因为传动杆3
‑
17运动形式不变,传动杆转轴3
‑
27位置改变可使传动连杆3
‑
24带动滑枕受力杆1
‑
6运动行程进而改变两个刀具1
‑
12行程,使设备具备调节刀具倾角与刀具行程功能。
34.具体实施方式三:
35.下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15说明本实施方式,本实施方式对实施方式一作进一步说明,所述的自动行进夹持机构2包括多个支撑杆2
‑
1、两个夹持导轨平台2
‑
2、两个夹具紧固螺杆2
‑
3、两个夹具2
‑
4、两个夹具活动端2
‑
5、多个支撑座一2
‑
6、两个槽轮2
‑
7、两个传动蜗杆2
‑
8、两个传动蜗轮2
‑
9、两个传动轴一2
‑
10、两个支撑座二2
‑
11、两个齿轮一2
‑
12、两个齿条2
‑
13、多个夹具滑槽2
‑
14、多个夹具滑块2
‑
15、两个活动端滑槽2
‑
16、两个活动端受力腔2
‑
17,多个支撑杆2
‑
1分别与两个夹持导轨平台2
‑
2相连,两个夹持导轨平台2
‑
2分别设有多个夹具滑槽2
‑
14,两个夹具紧固螺杆2
‑
3分别与两个夹具2
‑
4螺纹连接,两个夹具紧固螺杆2
‑
3分别与两个夹具活动端2
‑
5相接触,两个夹具紧固螺杆2
‑
3分别与两个活动端受力腔2
‑
17相接触,两个夹具2
‑
4分别设有两个齿条2
‑
13,两个夹具2
‑
4分别设有多个夹具滑块2
‑
15,两个夹具2
‑
4分别设有两个活动端滑槽2
‑
16,两个夹具活动端2
‑
5分别与两个活动端滑槽2
‑
16滑动连接,两个夹具活动端2
‑
5分别设有两个活动端受力腔2
‑
17,多个支撑座一2
‑
6分别与两个传动蜗杆2
‑
8转动连接,两个槽轮2
‑
7分别与两个传动蜗杆2
‑
8相连,两个传动蜗杆2
‑
8分别与两个传动蜗轮2
‑
9相啮合,两个传动蜗轮2
‑
9分别与两个传动轴一2
‑
10相连,两个传动轴一2
‑
10分别与两个支撑座二2
‑
11转动连接,两个传动轴一2
‑
10分别与两个齿轮一2
‑
12相连,两个齿轮一2
‑
12分别与两个齿条2
‑
13相啮合,多个夹具滑块2
‑
15分别设置在多个夹具滑槽2
‑
14内,反转两个夹具紧固螺杆2
‑
3分别带动两个夹具活动端2
‑
5在两个活动端滑槽2
‑
16内滑动使两个夹具2
‑
4工作空间变大,物料放入后正传两个夹具紧固螺杆2
‑
3分别带动两个夹具活动端2
‑
5在两个活动端滑槽2
‑
16内滑动使两个夹具2
‑
4工作空间减小并夹紧物料,使设备具备夹持物料功能,传动轴二3
‑
4带动链轮一3
‑
10、链轮三3
‑
14转动,链轮一3
‑
10带动链条一3
‑
11运动,链条一3
‑
11带动链轮二3
‑
12转动,链轮三3
‑
14带动链条二3
‑
15运动,链条二3
‑
15带动链轮四3
‑
16转动,链轮一3
‑
10带动、链轮三3
‑
14分别带动两个传动轴三3
‑
8转动,两个传动轴三3
‑
8分别带动两个主动拨盘3
‑
6转动,两个主动拨盘3
‑
6带动两个槽轮2
‑
7间歇转动,两个槽轮2
‑
7带动两个传动蜗杆2
‑
8转动,两个传动蜗杆2
‑
8带动两个传动蜗轮2
‑
9转动,两个传动蜗轮2
‑
9带动两个传动轴一2
‑
10转动,两个传动轴一2
‑
10带动两个齿轮一2
‑
12转动,两个齿轮一2
‑
12带动两个齿条2
‑
13运动,两个齿条2
‑
13带动两个夹具2
‑
4沿滑槽2
‑
14运动,使设备具备自动驱动物料行进功能。
36.具体实施方式四:
37.下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、
图15说明本实施方式,本实施方式对实施方式一作进一步说明,所述的动力机构3包括电机3
‑
1、齿轮二3
‑
2、齿轮三3
‑
3、传动轴二3
‑
4、支撑座三3
‑
5、两个主动拨盘3
‑
6、两个支撑座四3
‑
7、两个传动轴三3
‑
8、两个支撑座五3
‑
9、链轮一3
‑
10、链条一3
‑
11、链轮二3
‑
12、支撑座六3
‑
13、链轮三3
‑
14、链条二3
‑
15、链轮四3
‑
16、传动杆3
‑
17、传动转轮3
‑
18、两个支撑台3
‑
19、两个连杆转轴支撑台3
‑
20、多个高度调节螺栓3
‑
21、滑块一3
‑
22、通孔一3
‑
23、传动连杆3
‑
24、通孔二3
‑
25、滑块二3
‑
26、传动杆转轴3
‑
27,电机3
‑
1与齿轮二3
‑
2转动连接,齿轮二3
‑
2、齿轮三3
‑
3相啮合,齿轮三3
‑
3与传动轴二3
‑
4相连,传动轴二3
‑
4与支撑座三3
‑
5转动连接,传动轴二3
‑
4与链轮一3
‑
10相连,传动轴二3
‑
4与支撑座六3
‑
13转动连接,传动轴二3
‑
4与链轮三3
‑
14相连,传动轴二3
‑
4与传动转轮3
‑
18相连,两个主动拨盘3
‑
6分别与两个传动轴三3
‑
8相连,两个支撑座四3
‑
7分别与两个传动轴三3
‑
8转动连接,两个传动轴三3
‑
8分别与两个支撑座五3
‑
9转动连接,两个传动轴三3
‑
8分别与链轮二3
‑
12、链轮四3
‑
16相连,链轮一3
‑
10与链条一3
‑
11相啮合,链条一3
‑
11与链轮二3
‑
12相啮合,链轮三3
‑
14与链条二3
‑
15相啮合,链条二3
‑
15与链轮四3
‑
16相啮合,传动杆3
‑
17与传动转轮3
‑
18相连,传动杆3
‑
17与滑块一3
‑
22相铰接,两个支撑台3
‑
19分别与多个高度调节螺栓3
‑
21转动连接,多个高度调节螺栓3
‑
21分别与两个连杆转轴支撑台3
‑
20螺纹连接,两个连杆转轴支撑台3
‑
20与传动杆转轴3
‑
27相铰接,滑块一3
‑
22设置在通孔一3
‑
23内,传动连杆3
‑
24设有通孔一3
‑
23、通孔二3
‑
25,滑块二3
‑
26设置在通孔二3
‑
25内,滑块二3
‑
26与传动杆转轴3
‑
27相铰接,滑枕1
‑
1与传动连杆3
‑
24相铰接,滑枕导轨1
‑
4与两个支撑台3
‑
19相连,两个槽轮2
‑
7分别与两个主动拨盘3
‑
6相接触。
38.具体实施方式五:
39.下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15说明本实施方式,本实施方式对实施方式一作进一步说明,所述的两个夹具紧固螺杆2
‑
3底端设有圆台,当正反两向旋转时圆台与两个活动端受力腔2
‑
17水平方向接触受力,垂直方向不接触。
40.本装置的工作原理是:设备能够双侧加工金属表面,工作时电机3
‑
1带动齿轮二3
‑
2转动,齿轮二3
‑
2带动齿轮三3
‑
3转动,齿轮三3
‑
3带动传动轴二3
‑
4转动,传动轴二3
‑
4带动传动转轮3
‑
18转动,传动转轮3
‑
18带动传动杆3
‑
17运动,传动杆3
‑
17带动滑块一3
‑
22在通孔一3
‑
23内运动,滑块一3
‑
22带动传动连杆3
‑
24绕传动杆转轴3
‑
27摆动,传动连杆3
‑
24带动滑枕受力杆1
‑
6运动,滑枕受力杆1
‑
6带动滑枕1
‑
1在滑枕导轨1
‑
4上滑动,滑枕1
‑
1带动两个支撑块1
‑
2运动,两个支撑块1
‑
2运动带动两个刀具支撑块1
‑
11运动,两个刀具支撑块1
‑
11带动两个刀具1
‑
12运动,使设备具备双侧加工金属表面功能;设备能够调节刀具行程与倾角,需要调节刀具倾角时反转两个支撑块紧固螺栓1
‑
3,使两个支撑块1
‑
2可自由绕两个支撑块转轴1
‑
7摆动,调整完成后再正转紧固螺栓1
‑
3紧固,调节刀具行程时旋转多个高度调节螺栓3
‑
21带动两个连杆转轴支撑台3
‑
20运动,两个连杆转轴支撑台3
‑
20带动传动杆转轴3
‑
27运动,因为传动杆3
‑
17运动形式不变,传动杆转轴3
‑
27位置改变可使传动连杆3
‑
24带动滑枕受力杆1
‑
6运动行程进而改变两个刀具1
‑
12行程,使设备具备调节刀具倾角与刀具行程功能;设备能够夹持物料,反转两个夹具紧固螺杆2
‑
3分别带动两个夹具活动端2
‑
5在两个活动端滑槽2
‑
16内滑动使两个夹具2
‑
4工作空间变大,物料放入后正传两个夹具紧固螺杆2
‑
3分别带动两个夹具活动端2
‑
5在两个活动端滑槽2
‑
16内滑动使两个夹具2
‑
4工作
空间减小并夹紧物料,使设备具备夹持物料功能;设备能够驱动物料自动行进,传动轴二3
‑
4带动链轮一3
‑
10、链轮三3
‑
14转动,链轮一3
‑
10带动链条一3
‑
11运动,链条一3
‑
11带动链轮二3
‑
12转动,链轮三3
‑
14带动链条二3
‑
15运动,链条二3
‑
15带动链轮四3
‑
16转动,链轮一3
‑
10带动、链轮三3
‑
14分别带动两个传动轴三3
‑
8转动,两个传动轴三3
‑
8分别带动两个主动拨盘3
‑
6转动,两个主动拨盘3
‑
6带动两个槽轮2
‑
7间歇转动,两个槽轮2
‑
7带动两个传动蜗杆2
‑
8转动,两个传动蜗杆2
‑
8带动两个传动蜗轮2
‑
9转动,两个传动蜗轮2
‑
9带动两个传动轴一2
‑
10转动,两个传动轴一2
‑
10带动两个齿轮一2
‑
12转动,两个齿轮一2
‑
12带动两个齿条2
‑
13运动,两个齿条2
‑
13带动两个夹具2
‑
4沿滑槽2
‑
14运动,使设备具备自动驱动物料行进功能。
41.当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1