一种高适应性PC钢棒切割装置的制作方法
一种高适应性pc钢棒切割装置
技术领域
[0001]
本实用新型涉及切割装置技术领域,尤其是涉及一种高适应性pc钢棒切割装置。
背景技术:
[0002]
pc钢棒,又称预应力混凝土用钢棒,是一种技术含量很高的预应力钢材,主要应用于制作港口混凝土管桩、高层建筑地基混凝土管桩、桥墩混凝土管桩等。
[0003]
现有授权公告号为cn207205431u的中国专利公开了一种钢棒切割装置,包括输送装置、切割装置和升降机构;输送装置设有多个平行的转动辊,转动辊水平排布安装在机架上;机架下设第一电动机,第一电动机输出端连接一第一减速器,第一减速器输出端连接有链轮;相邻的两个转动辊通过链条链轮结构连接并同步转动;机架设有夹块,用来固定钢棒;切割装置用于对钢棒进行切割;升降机构通过油缸实现切割刀具的升降,机架上固定设置有红外传感器。红外传感器用于检测钢棒输送的长度。当钢棒长度达到理想切割长度时,红外传感器向控制器发送信号,控制器控制切割装置对钢棒进行切割。
[0004]
但是,上述的现有技术中存在以下缺陷:由于切割装置需要切割不同长度的钢棒,为了检测不同长度的钢棒,机架的不同位置均设置有红外传感器,使得生产成本较高。
技术实现要素:
[0005]
针对现有技术存在的不足,本实用新型的目的之一是提供一种高适应性pc钢棒切割装置,其便于减小生产成本。
[0006]
本实用新型的上述实用新型目的是通过以下技术方案得以实现的:一种高适应性pc钢棒切割装置,包括机架、设置在机架上的输送装置以及切割装置,所述机架的顶端设置有供钢棒滑移的凹槽,所述机架上设置有固定座,所述固定座上设置有朝向凹槽的红外传感器;
[0007]
所述固定座上设置有与凹槽滑移设置的滑块,所述固定座与机架之间设置有用于固定固定座与机架的固定件。
[0008]
通过采用上述技术方案,固定座以及红外传感器能够沿机架的长度方向滑动,从而能够检测不同长度的钢棒,不需要在机架上设置多个红外传感器即可检测不同长度的钢棒,从而能够减小生产成本。
[0009]
本实用新型在一较佳示例中可以进一步配置为:所述机架沿其宽度方向的任意一个端面上设置有导向槽,所述导向槽沿机架的长度方向设置,所述固定座上设置有与导向槽滑移配合的导向块。
[0010]
通过采用上述技术方案,导向槽与导向块的设置,能够增加固定座与机架之间的连接稳定性,进而能够使得固定座在机架上滑动的更加稳定。
[0011]
本实用新型在一较佳示例中可以进一步配置为:所述固定座的底端设置有安装孔,所述固定件包括设置在安装孔内的定位杆,所述定位杆的一端伸出安装孔且呈半球状,所述机架上设置有用于供定位杆呈半球状的端部伸入的定位槽;所述安装孔内设置有用于
防止定位杆脱离安装孔的限位件,所述安装孔内设置有用于向定位杆施加朝向安装孔底壁方向的弹性件。
[0012]
通过采用上述技术方案,当定位杆伸入定位槽内时,能够将固定座与机架牢牢固定在一起,当需要移动固定座时,在定位杆呈半球状端部的导向作用下,定位杆相远离定位槽的方向移动,使得定位杆脱离定位槽,即可移动固定座以及红外传感器;当定位杆与定位槽相对应时,定位杆在弹性件的弹性作用力下伸入定位槽内,从而能够将固定座牢牢固定住。
[0013]
本实用新型在一较佳示例中可以进一步配置为:所述限位件包括设置在定位杆上的限位块,所述限位块设置在安装孔内。
[0014]
通过采用上述技术方案,限位块的设置,能够避免定位杆脱离安装孔。
[0015]
本实用新型在一较佳示例中可以进一步配置为:所述固定座的顶端设置有与安装孔相连通的让位槽,所述定位杆的顶端穿出固定座连接有抵接块,所述抵接块设置在让位槽内;所述抵接块上设置有用于驱动定位杆转动的驱动件。
[0016]
通过采用上述技术方案,在初始状态下,抵接块设置在让位槽内;当需要移动固定座以及红外传感器时,驱动抵接块向上移动,带动定位杆向上移动,当抵接块脱离让位槽时,转动抵接块;当抵接块转动一定角度后,抵接块与固定座的顶面相抵,此时,定位杆脱离定位槽。从而能够便于固定座的移动,避免固定座在移动的过程中定位杆与机架的顶面相接触而对定位杆造成损坏。
[0017]
本实用新型在一较佳示例中可以进一步配置为:所述驱动件设置为设置在抵接块顶端的驱动块,所述驱动块的顶面高于固定座的顶面。
[0018]
通过采用上述技术方案,驱动块的设置,便于驱动定位杆的转动,从而达到便于操作的效果。
[0019]
本实用新型在一较佳示例中可以进一步配置为:所述机架沿其宽度方向的任一端面上设置有刻度尺,所述固定座上设置有用于指向刻度尺的指针。
[0020]
通过采用上述技术方案,便于工作人员判断钢棒的长度,从而能够便于提高钢棒切割的精准度。
[0021]
本实用新型在一较佳示例中可以进一步配置为:所述导向块靠近机架的侧壁上嵌设有滚珠。
[0022]
通过采用上述技术方案,能够减小导向块与导向槽之间的静摩擦力系数,从而能够便于导向块以及固定座的滑动。
[0023]
综上所述,本实用新型包括以下至少一种有益技术效果:
[0024]
1.通过滑块、固定座以及凹槽的设置,便于固定座以及红外传感器的滑动,能够检测不同长度的钢棒,从而能够减小生产成本;
[0025]
2.通过定位杆、定位槽的设置,能够便于将固定座牢牢固定住。
附图说明
[0026]
图1是本实用新型实施例示出的机架的结构示意图;
[0027]
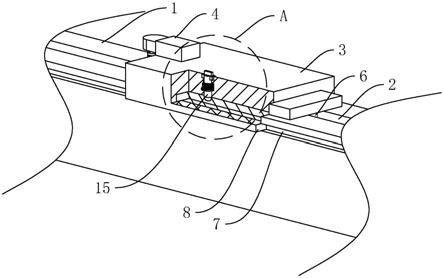
图2是本实用新型实施例示出的用于体现固定座的结构示意图;
[0028]
图3是图2中a部分的放大图。
[0029]
图中,1、机架;2、凹槽;3、固定座;4、连接块;5、红外传感器;6、滑块;7、导向槽;8、导向块;9、刻度尺;10、指针;11、安装孔;12、连接孔;13、滑移孔;14、定位孔;15、定位杆;16、限位块;17、弹簧;18、定位槽;19、让位槽;20、抵接块;21、驱动块。
具体实施方式
[0030]
以下结合附图对本实用新型作进一步详细说明。
[0031]
参照图1,为本实用新型公开的一种高适应性pc钢棒切割装置,包括机架1、设置在机架1上的输送装置以及切割装置,机架1的顶端设置有供钢棒滑移的凹槽2,凹槽2沿机架1的长度方向设置。
[0032]
参照图1,机架1上滑移设置有固定座3,固定座3沿机架1长度方向的一端设置有连接块4,连接块4的底端设置有朝向凹槽2的红外传感器5,红外传感器5连接有控制器。固定座3远离连接块4的一端设置有用于伸入凹槽2的滑块6,且滑块6的底端与钢棒之间具有间隙。
[0033]
参照图2,机架1沿其宽度方向的两端均设置有导向槽7,导向槽7沿机架1的长度方向设置,且导向槽7延伸至机架1沿其长度方向的两个端面。固定座3上设置有与导向槽7滑移配合的导向块8,能够增加固定座3与机架1之间的连接稳定性,使得固定座3在机架1上滑移时更加稳定。导向块8靠近机架1的侧壁上嵌设有多个滚珠,有效减小导向块8与导向槽7之间的静摩擦力系数,从而能够便于导向块8与固定座3的滑动。
[0034]
参照图2,机架1沿其宽度方向的其中一个端面上设置有刻度尺9,固定座3上设置有用于指向刻度尺9的指针10,便于工作人员判断钢棒的长度。
[0035]
参照图3,固定座3的底端设置有安装孔11,安装孔11包括从上至下依次设置的连接孔12、滑移孔13以及定位孔14,且连接孔12以及定位孔14的直径均小于滑移孔13的直径。
[0036]
参照图3,固定座3与机架1之间设置有固定件,具体的,固定件包括设置在安装孔11内的定位杆15,定位杆15的底端伸出定位孔14且呈半球状。定位杆15的外侧壁上设置有限位件,具体的,限位件包括套设在定位杆15上的限位块16,限位块16呈环状,限位块16设置在安装孔11内,且限位孔的外径小于滑移孔13的直径且大于定位孔14的直径,能够避免定位杆15脱离安装孔11。
[0037]
参照图3,安装孔11内设置有弹性件,具体的,弹性件设置为弹簧17,弹簧17套设在定位杆15上,且弹簧17的一端与限位环相连接,弹簧17的另一端与滑移孔13靠近连接孔12的一端相连接。机架1的顶端沿其长度方向均匀设置有多个供定位杆15呈半球状的端部伸入的定位槽18,当定位杆15伸入定位槽18内时,能够将固定座3牢牢固定住。
[0038]
参照图3,固定座3的顶端设置有与连接孔12连通的让位槽19,定位杆15的顶端穿出连接孔12连接有抵接块20,抵接块20设置在让位槽19内,抵接块20上设置有用于驱动定位杆15转动的驱动件,具体的,驱动件设置为设置在抵接块20顶端的驱动块21,驱动块21的顶面高于固定座3的顶面,便于抵接块20以及定位杆15的转动。
[0039]
参照图1和图3,当需要移动固定座3以及红外传感器5时,驱动驱动块21向上移动,使得驱动块21带动抵接块20以及定位杆15向上移动,弹簧17被压缩;当抵接块20脱离让位槽19时,转动驱动块21,使得抵接块20与定位杆15转动;当驱动块21转动一定角度后,松开驱动块21,抵接块20、驱动块21以及定位杆15在弹簧17的弹性作用下向下移动,使得抵接块
20与固定座3的顶面相抵,此时,定位杆15脱离定位槽18。从而能够便于固定座3的移动,避免固定座3在移动的过程中定位杆15与机架1的顶面相接触而对定位杆15造成损坏。
[0040]
本实施例的实施原理为:
[0041]
当需要移动固定座3以及红外传感器5时,驱动驱动块21向上移动,使得驱动块21带动抵接块20以及定位杆15向上移动,弹簧17被压缩;当抵接块20脱离让位槽19时,转动驱动块21,使得抵接块20与定位杆15转动;当驱动块21转动一定角度后,松开驱动块21,抵接块20、驱动块21以及定位杆15在弹簧17的弹性作用下向下移动,使得抵接块20与固定座3的顶面相抵,此时,定位杆15脱离定位槽18。
[0042]
将固定座3以及红外传感器5移动至指定位置后,转动驱动块21,使得驱动块21带动抵接块20以及定位杆15转动,当转动至一定角度后,抵接块20与让位槽19相对应;松开驱动块21,抵接块20以及定位杆15在弹簧17的弹性作用力下向下移动,此时,定位杆15伸入定位槽18内,能够将固定座3牢牢固定住。
[0043]
本具体实施方式的实施例均为本实用新型的较佳实施例,并非依此限制本实用新型的保护范围,故:凡依本实用新型的结构、形状、原理所做的等效变化,均应涵盖于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1