一种全自动微钻开槽研磨一体机的制作方法
1.本实用新型涉及pcb微钻刀具制造设备技术领域,尤其是指一种全自动微钻开槽研磨一体机。
背景技术:
2.传统的微钻的开槽工序和研磨工序需要分别在开槽机和研磨机上单独进行,生产效率低,不利于批量生产。而且传统的开槽机和研磨机均采用人工装夹微钻,人工移送微钻,不仅工作效率低,而且人工成本高。同时,微钻在被开槽和被研磨的过程中会出现抖动,传统的开槽机和研磨机均没有设置防抖动机构,导致微钻的加工精度低,不良品率高。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种全自动微钻开槽研磨一体机,该全自动微钻开槽研磨一体机能实现对微钻同时进行开槽工序和研磨工序,生产效率高,有利于批量生产。而且全自动微钻开槽研磨一体机能实现自动化地装夹微钻,自动化地将微钻移送至各个工作工位,不需要人工的参与,不仅工作效率高,而且人工成本低。同时,夹头机构设置有防抖动机构,防抖动机构能防止微钻在被开槽和被研磨的过程中出现抖动,提高微钻的加工精度和提高良品率。
4.为了解决上述技术问题,本实用新型采用如下技术方案:
5.一种全自动微钻开槽研磨一体机,其包括工作台、夹头机构、机械手机构、载料台和砂轮机构;所述载料台设置于工作台并用于承载装有多支微钻的料盘;所述机械手机构设置于工作台并用于将载料台所承载的微钻移送至夹头机构;所述夹头机构设置于工作台并用于将机械手机构所移送的微钻夹紧,夹头机构也用于将微钻移送至砂轮机构;所述砂轮机构设置于工作台并用于对夹头机构所移送的微钻进行开槽研磨处理;
6.所述夹头机构包括夹头组件、y轴移载机构、x轴移载机构、z轴移载机构和防抖动机构;所述x轴移载机构设置于y轴移载机构,z轴移载机构设置于x轴移载机构,夹头组件和防抖动机构均设置于z轴移载机构,y轴移载机构用于驱动x轴移载机构沿y轴方向移动,x轴移载机构用于驱动z轴移载机构沿x轴方向移动,z轴移载机构用于驱动夹头组件和防抖动机构沿z轴方向移动;
7.所述夹头组件用于将机械手机构所移送的微钻夹紧;所述防抖动机构包括抵触件和抵触件驱动机构,抵触件驱动机构设置于z轴移载机构并用于驱动抵触件靠近或远离夹头组件,抵触件用于抵触夹头组件所夹紧的微钻。
8.进一步地,所述抵触件包括连接部和抵触部,抵触部连接于连接部靠近夹头组件的一端,连接部与抵触件驱动机构驱动连接。
9.进一步地,所述连接部包括连接杆、连接杆安装座和连接杆锁紧螺钉;所述连接杆安装座与抵触件驱动机构驱动连接,连接杆转动连接于连接杆安装座,连接杆锁紧螺钉用于将连接杆锁紧于连接杆安装座;抵触部连接于连接杆靠近夹头组件的一端。
10.进一步地,所述抵触部包括抵触块、压紧块和压紧块锁紧螺钉,压紧块用于将抵触块压持于连接部,压紧块锁紧螺钉用于将压紧块锁紧于连接部。
11.进一步地,所述抵触块的每个面分别凹设有卡槽,卡槽用于容设夹头组件所夹紧的微钻。
12.进一步地,所述抵触块的每个面的卡槽的形状及规格均不相同。
13.进一步地,所述夹头组件包括夹头、夹头套、夹头夹紧驱动机构、夹头旋转驱动机构、夹头安装座和连接件;连接件设置于z轴移载机构,夹头安装座设置于连接件,夹头套连接于夹头安装座,夹头套套设于夹头,夹头突伸出夹头套,夹头套开设有用于容设夹头的锥形容置腔,夹头夹紧驱动机构设置于连接件并用于驱动夹头沿着锥形容置腔移动;夹头呈锥形状,夹头设置有装夹容置腔和若干条分隔槽,若干条分隔槽将夹头分割成多个弹性夹爪,多个弹性夹爪能彼此相互靠拢或远离;装夹容置腔用于装夹微钻,若干条分隔槽分别与装夹容置腔连通;夹头旋转驱动机构设置于连接件并用于驱动夹头转动。
14.进一步地,所述机械手机构包括机械手支架、第一驱动机构、第二驱动机构、第三驱动机构、机械手旋转驱动机构和两个机械手;所述机械手支架设置于工作台,第一驱动机构设置于机械手支架并用于驱动第二驱动机构沿着y轴方向移动,第二驱动机构设置于第一驱动机构并用于驱动第三驱动机构沿着x轴方向移动,第三驱动机构设置于第二驱动机构并用于驱动机械手旋转驱动机构沿着z轴方向移动,机械手旋转驱动机构设置于第三驱动机构并用于驱动两个机械手同步转动,两个机械手交叉设置。
15.进一步地,所述砂轮机构包括砂轮机、砂轮机移动驱动机构和砂轮机旋转驱动机构;所述砂轮机旋转驱动机构设置于工作台并用于驱动砂轮机移动驱动机构转动,砂轮机移动驱动机构设置于砂轮机旋转驱动机构并用于驱动砂轮机移动,砂轮机设置于砂轮机移动驱动机构并用于对夹头机构所移送的微钻进行开槽研磨处理。
16.进一步地,所述砂轮机包括转轴、转轴驱动机构和多块砂轮,转轴驱动机构设置于砂轮机移动驱动机构并用于驱动转轴转动,多块砂轮间隔连接于转轴;多块砂轮分别用于对夹头机构所移送的微钻进行开槽研磨处理。
17.本实用新型的有益效果:实际工作中,机械手机构将载料台所承载的一支微钻夹到夹头组件,夹头组件将微钻夹紧。然后抵触件驱动机构驱动抵触件靠近夹头组件移动,抵触件移动至设定位置时,抵触件抵触着夹头组件所夹紧的微钻,然后抵触件驱动机构停止工作。抵触件能防止微钻在被开槽和被研磨的过程中出现抖动,提高微钻的加工精度和提高良品率。优选的,抵触件与夹头组件交叉设置,具体的,抵触件与夹头组件呈度设置以提高抵触件对夹头组件所夹紧的微钻的抵触效果。然后在y轴移载机构、x轴移载机构和z轴移载机构的配合下将夹头组件和防抖动机构移送至砂轮机构,砂轮机构对夹头组件所夹紧的微钻进行开槽和研磨处理。微钻被开槽和被研磨处理完成后,在y轴移载机构、x轴移载机构和z轴移载机构的配合下将夹头组件所夹紧的微钻移送至初始位置,机械手机构将被开槽和被研磨处理后的微钻夹回载料台所承载的料盘上。同时,机械手机构再将下一支微钻夹到夹头组件,如此地循环工作。本申请的全自动微钻开槽研磨一体机能实现对微钻同时进行开槽工序和研磨工序,生产效率高,有利于批量生产。而且全自动微钻开槽研磨一体机能实现自动化地装夹微钻,自动化地将微钻移送至各个工作工位,不需要人工的参与,不仅工作效率高,而且人工成本低。同时,夹头机构设置有防抖动机构,防抖动机构能防止微钻在
被开槽和被研磨的过程中出现抖动,提高微钻的加工精度和提高良品率。
附图说明
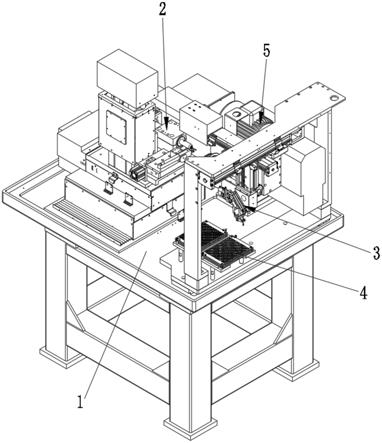
18.图1为本实用新型的立体结构示意图。
19.图2为本实用新型的夹头机构的立体结构示意图。
20.图3为图2中a处的放大示意图。
21.图4为图3中b处的放大示意图。
22.图5为本实用新型的机械手机构和载料台的立体结构示意图。
23.图6为本实用新型的砂轮机构的立体结构示意图。
24.附图标记说明:
25.工作台1;夹头机构2;夹头组件21;夹头211;装夹容置腔2111;分隔槽2112;弹性夹爪2113;夹头套212;夹头夹紧驱动机构213;夹头旋转驱动机构214;夹头安装座215;连接件216;y轴移载机构22;x轴移载机构23;z轴移载机构24;防抖动机构25;抵触件251;连接部2511;抵触部2512;连接杆2513;连接杆安装座2514;连接杆锁紧螺钉2515;抵触块2516;压紧块2517;压紧块锁紧螺钉2518;卡槽2519;抵触件驱动机构252;机械手机构3;机械手支架31;第一驱动机构32;第二驱动机构33;第三驱动机构34;机械手旋转驱动机构35;机械手36;载料台4;砂轮机构5;砂轮机51;转轴511;转轴驱动机构512;砂轮513;砂轮机移动驱动机构52;砂轮机旋转驱动机构53。
具体实施方式
26.为了便于本领域技术人员的理解,下面结合实施例与附图对本实用新型作进一步的说明,实施方式提及的内容并非对本实用新型的限定。
27.如图1至图3所示,本实用新型提供的一种全自动微钻开槽研磨一体机,其包括工作台1、夹头机构2、机械手机构3、载料台4和砂轮机构5;所述载料台4设置于工作台1并用于承载装有多支微钻的料盘;所述机械手机构3设置于工作台1并用于将载料台4所承载的微钻移送至夹头机构2;所述夹头机构2设置于工作台1并用于将机械手机构3所移送的微钻夹紧,夹头机构2也用于将微钻移送至砂轮机构5;所述砂轮机构5设置于工作台1并用于对夹头机构2所移送的微钻进行开槽研磨处理;
28.所述夹头机构2包括夹头组件21、y轴移载机构22、x轴移载机构23、z轴移载机构24和防抖动机构25;所述x轴移载机构23设置于y轴移载机构22,z轴移载机构24设置于x轴移载机构23,夹头组件21和防抖动机构25均设置于z轴移载机构24,y轴移载机构22用于驱动x轴移载机构23沿y轴方向移动,x轴移载机构23用于驱动z轴移载机构24沿x轴方向移动,z轴移载机构24用于驱动夹头组件21和防抖动机构25沿z轴方向移动;
29.所述夹头组件21用于将机械手机构3所移送的微钻夹紧;所述防抖动机构25包括抵触件251和抵触件驱动机构252,抵触件驱动机构252设置于z轴移载机构24并用于驱动抵触件251靠近或远离夹头组件21,抵触件251用于抵触夹头组件21所夹紧的微钻。
30.实际工作中,机械手机构3将载料台4所承载的一支微钻夹到夹头组件21,夹头组件21将微钻夹紧。然后抵触件驱动机构252驱动抵触件251靠近夹头组件21移动,抵触件251移动至设定位置时,抵触件251抵触着夹头组件21所夹紧的微钻,然后抵触件驱动机构252
停止工作。抵触件251能防止微钻在被开槽和被研磨的过程中出现抖动,提高微钻的加工精度和提高良品率。优选的,抵触件251与夹头组件21交叉设置,具体的,抵触件251与夹头组件21呈90度设置以提高抵触件251对夹头组件21所夹紧的微钻的抵触效果。然后在y轴移载机构22、x轴移载机构23和z轴移载机构24的配合下将夹头组件21和防抖动机构25移送至砂轮机构5,砂轮机构5对夹头组件21所夹紧的微钻进行开槽和研磨处理。微钻被开槽和被研磨处理完成后,在y轴移载机构22、x轴移载机构23和z轴移载机构24的配合下将夹头组件21所夹紧的微钻移送至初始位置,机械手机构3将被开槽和被研磨处理后的微钻夹回载料台4所承载的料盘上。同时,机械手机构3再将下一支微钻夹到夹头组件21,如此地循环工作。
31.本申请的全自动微钻开槽研磨一体机能实现对微钻同时进行开槽工序和研磨工序,生产效率高,有利于批量生产。而且全自动微钻开槽研磨一体机能实现自动化地装夹微钻,自动化地将微钻移送至各个工作工位,不需要人工的参与,不仅工作效率高,而且人工成本低。同时,夹头机构2设置有防抖动机构25,防抖动机构25能防止微钻在被开槽和被研磨的过程中出现抖动,提高微钻的加工精度和提高良品率。
32.如图3所示,本实施例中,所述抵触件251包括连接部2511和抵触部2512,抵触部2512连接于连接部2511靠近夹头组件21的一端,连接部2511与抵触件驱动机构252驱动连接。
33.实际工作中,夹头组件21将微钻夹紧后,抵触件驱动机构252驱动连接部2511连带抵触部2512一起靠近夹头组件21移动,连接部2511和抵触部2512移动至设定位置时,抵触部2512抵触着夹头组件21所夹紧的微钻,然后抵触件驱动机构252停止工作。本申请的抵触件251的结构简单,抵触部2512能有效地抵触着夹头组件21所夹紧的微钻,抵触部2512能防止微钻在被开槽和被研磨的过程中出现抖动,提高微钻的加工精度和提高良品率。
34.如图3所示,本实施例中,所述连接部2511包括连接杆2513、连接杆安装座2514和连接杆锁紧螺钉2515;所述连接杆安装座2514与抵触件驱动机构252驱动连接,连接杆2513转动连接于连接杆安装座2514,连接杆锁紧螺钉2515用于将连接杆2513锁紧于连接杆安装座2514;抵触部2512连接于连接杆2513靠近夹头组件21的一端。
35.实际工作中,可以根据生产的需要对抵触部2512的角度进行调节。具体的,在工作前,操作人员转动连接杆2513,转动的连接杆2513带动抵触部2512一起转动,从而实现抵触部2512的角度调节。然后操作人员再用连接杆锁紧螺钉2515将连接杆2513锁紧于连接杆安装座2514,从而固定连接杆2513和抵触部2512的位置。
36.如图4所示,本实施例中,所述抵触部2512包括抵触块2516、压紧块2517和压紧块锁紧螺钉2518,压紧块2517用于将抵触块2516压持于连接部2511,压紧块锁紧螺钉2518用于将压紧块2517锁紧于连接部2511。
37.实际使用时,操作人员用压紧块2517将抵触块2516压持于连接部2511,然后操作人员再用压紧块锁紧螺钉2518将压紧块2517锁紧于连接部2511,以使得抵触块2516被压紧块2517和连接部2511夹紧。本申请的抵触部2512的结构简单,安装及拆卸方便。
38.如图4所示,本实施例中,所述抵触块2516的每个面分别凹设有卡槽2519,卡槽2519用于容设夹头组件21所夹紧的微钻。所述抵触块2516的每个面的卡槽2519的形状及规格均不相同。
39.抵触块2516的每个面的卡槽2519对应卡持一种规格的微钻,实际使用时,操作人
员可以根据生产的需要选用对应的卡槽2519,适用范围广,满足生产的需求。优选的,卡槽2519为v型卡槽,v型卡槽对微钻的抵触效果更好。
40.如图2至图4所示,本实施例中,所述夹头组件21包括夹头211、夹头套212、夹头夹紧驱动机构213、夹头旋转驱动机构214、夹头安装座215和连接件216;连接件216设置于z轴移载机构24,夹头安装座215设置于连接件216,夹头套212连接于夹头安装座215,夹头套212套设于夹头211,夹头211突伸出夹头套212,夹头套212开设有用于容设夹头211的锥形容置腔(图中未标示),夹头夹紧驱动机构213设置于连接件216并用于驱动夹头211沿着锥形容置腔移动;夹头211呈锥形状,夹头211设置有装夹容置腔2111和若干条分隔槽2112,若干条分隔槽2112将夹头211分割成多个弹性夹爪2113,多个弹性夹爪2113能彼此相互靠拢或远离;装夹容置腔2111用于装夹微钻,若干条分隔槽2112分别与装夹容置腔2111连通;夹头旋转驱动机构214设置于连接件216并用于驱动夹头211转动。
41.实际工作中,机械手机构3将载料台4所承载的一支微钻夹到装夹容置腔2111内,然后夹头夹紧驱动机构213驱动夹头211逐渐缩回夹头套212内。由于夹头211呈锥形状,夹头211逐渐缩回夹头套212内时,锥形容置腔的内壁就会顶压着多个弹性夹爪2113彼此相互靠拢,多个弹性夹爪2113彼此相互靠拢后就会夹紧装夹容置腔2111内的微钻,然后夹头夹紧驱动机构213停止工作。然后夹头旋转驱动机构214驱动夹头211转动,转动的夹头211带动夹头211所夹紧的微钻转动以使得微钻的开槽面向上。然后抵触件驱动机构252驱动抵触件251靠近夹头211移动,抵触件251移动至设定位置时,抵触件251抵触着夹头211所夹紧的微钻,然后抵触件驱动机构252停止工作。然后在y轴移载机构22、x轴移载机构23和z轴移载机构24的配合下将夹头组件21和防抖动机构25移送至砂轮机构5,砂轮机构5对夹头211所夹紧的微钻进行开槽和研磨处理。微钻被开槽和被研磨处理完成后,在y轴移载机构22、x轴移载机构23和z轴移载机构24的配合下将夹头211所夹紧的微钻移送至初始位置,机械手机构3将被开槽和被研磨处理后的微钻夹回载料台4所承载的料盘上。同时,机械手机构3再将下一支微钻夹到装夹容置腔2111内,如此地循环工作。本申请的夹头组件21的结构简单,能实现自动化地装夹微钻,自动化地将微钻移送至各个工作工位,不需要人工的参与,不仅工作效率高,而且人工成本低。
42.如图5所示,本实施例中,所述机械手机构3包括机械手支架31、第一驱动机构32、第二驱动机构33、第三驱动机构34、机械手旋转驱动机构35和两个机械手36;所述机械手支架31设置于工作台1,第一驱动机构32设置于机械手支架31并用于驱动第二驱动机构33沿着y轴方向移动,第二驱动机构33设置于第一驱动机构32并用于驱动第三驱动机构34沿着x轴方向移动,第三驱动机构34设置于第二驱动机构33并用于驱动机械手旋转驱动机构35沿着z轴方向移动,机械手旋转驱动机构35设置于第三驱动机构34并用于驱动两个机械手36同步转动,两个机械手36交叉设置。
43.实际工作中,第一驱动机构32驱动第二驱动机构33沿着y轴方向移动,第二驱动机构33驱动第三驱动机构34沿着x轴方向移动,第三驱动机构34驱动机械手旋转驱动机构35沿着z轴方向移动,机械手旋转驱动机构35驱动两个机械手36同步转动,转动的两个机械手36分别转动至设定的位置。具体的,两个机械手36呈90度设置,一个机械手36从载料台4上夹取一支待开槽研磨的微钻,另一个机械手36将夹头机构2所夹紧的被开槽研磨后的微钻取走。然后机械手旋转驱动机构35驱动两个机械手36同步转动以使得两个机械手36调换位
置,两个机械手36被调换位置后,一个机械手36将一支待开槽研磨的微钻移送至夹头机构2,另一个机械手36将被开槽研磨后的微钻移送至载料台4所承载的料盘上。在第一驱动机构32、第二驱动机构33、第三驱动机构34、机械手旋转驱动机构35和两个机械手36的配合下,机械手机构3能自动化地完成微钻的上料和下料工作,生产效率高。
44.如图6所示,本实施例中,所述砂轮机构5包括砂轮机51、砂轮机移动驱动机构52和砂轮机旋转驱动机构53;所述砂轮机旋转驱动机构53设置于工作台1并用于驱动砂轮机移动驱动机构52转动,砂轮机移动驱动机构52设置于砂轮机旋转驱动机构53并用于驱动砂轮机51移动,砂轮机51设置于砂轮机移动驱动机构52并用于对夹头机构2所移送的微钻进行开槽研磨处理。所述砂轮机51包括转轴511、转轴驱动机构512和多块砂轮513,转轴驱动机构512设置于砂轮机移动驱动机构52并用于驱动转轴511转动,多块砂轮513间隔连接于转轴511;多块砂轮513分别用于对夹头机构2所移送的微钻进行开槽研磨处理。
45.实际工作中,砂轮机旋转驱动机构53能驱动砂轮机移动驱动机构52连带砂轮机51一起转动以调节砂轮机51的角度,满足生产的需求。同时,砂轮机移动驱动机构52能驱动砂轮机51移动,满足生产的需求。在对微钻进行开槽研磨处理时,转轴驱动机构512驱动转轴511转动,转动的转轴511带动多块砂轮513一起转动,转动的砂轮513就会对微钻进行开槽研磨处理。具体的,有一块砂轮513对微钻进行开槽处理,有一块砂轮513对微钻进行抛光处理,有一块砂轮513对微钻进行粗磨处理,有一块砂轮513对微钻进行精磨处理。本申请的砂轮机51能实现全自动化地对微钻进行开槽研磨处理,自动化程度高,生产效率高。
46.本实施例中的所有技术特征均可根据实际需要而进行自由组合。
47.上述实施例为本实用新型较佳的实现方案,除此之外,本实用新型还可以其它方式实现,在不脱离本技术方案构思的前提下任何显而易见的替换均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1