一种基于重锤位移控制运丝速度的装置
:
1.本实用新型涉及电火花线切割技术领域,尤其涉及一种基于重锤位移控制运丝速度的装置。
背景技术:
2.电火花线切割机床为目前较常用的线切割机床,而双丝筒线切割机床,大大提升了电极丝存储量,且电极丝可以重复使用,提高了零件的加工精度和效率。但丝间张力是否恒定,即双丝筒运丝速度是否恒定会直接影响到加工零件的精度,为指导后续加工过程必须实时检测丝间张力,目前常用的方法为使用应变式压力传感器测量丝间张力,即钼丝绕过导轮,将力传给下面的压敏电阻,再将压敏电阻数值转换为力的大小显示在显示屏上,但该方法调整周期短,较难调整控制运丝速度,一般用于直观监测运丝速度是否恒定。
3.本实用新型通过重锤位置控制丝筒运丝速度,恒定一丝筒的转速,使用位置传感器监测重锤位置变化,通过检测重锤位置变化来调节另一个丝筒的转速,使重锤保持在预期位置,从而达到控制丝间张力的目的。
技术实现要素:
4.为弥补细丝张力检测装置较少的缺陷,本实用新型提供一种基于重锤位移控制运丝速度的装置,使得运转过程中细丝张力可实时监测并便于调整。
5.为实现上述目的,本实用新型采用下述技术方案:
6.一种基于重锤位移控制运丝速度的装置,包括第一丝筒、第二丝筒、拉线式位移传感器、框架、若干定导轮及若干动导轮,所述拉线式位移传感器的下端引出的拉线连接有连接件,连接件的下端通过吊线悬挂有重锤,连接件安装于导轨上,并能够沿导轨上下滑动;若干定导轮固定在框架上,若干动导轮设置于连接件上,第一丝筒上缠绕有钼丝,钼丝从第一丝筒引出后,经连接件上的动导轮,再缠绕于第二丝筒上。
7.进一步地,所述拉线式位移传感器、导轨固定安装于框架上。
8.进一步地,所述连接件的外立面设置有三个动导轮,分别为第一动导轮、第二动导轮、第三动导轮,三个动导轮上下交错布置,钼丝依次绕过这三个动导轮。
9.进一步地,所述定导轮为4个,分别为第一定导轮、第二定导轮、第三定导轮、第四定导轮,钼丝自第一丝筒引出后,依次绕过第一定导轮、连接件上的三个动导轮、第二定导轮、第三定导轮、第四定导轮,再缠绕于第二丝筒上。
10.进一步地,所述第一定导轮、第二定导轮和第三定导轮的外切线和第一丝筒的外切线在同一水平线,第四定导轮的外切线和第二丝筒的外切线在同一水平线。
11.进一步地,所述第一丝筒、第二丝筒以及定导轮、动导轮的芯轴相平行。
12.进一步地,所述导轨上设置有阻挡弹簧,阻挡弹簧位于连接件下方,起到支撑连接件的作用,机床在未工作时,由于重锤的重力作用,连接件使阻挡弹簧处于压缩状态。
13.本实用新型的有益效果:
14.1.弥补了检测丝间张力装置较少的不足,当丝间张力发生变化时,重锤位置会随之上下移动,进而可通过调节丝筒转速,来使重锤达到预定理想位置,从而达到控制丝间张力恒定的目的。
15.2.该装置同时具备调整周期比较长,方便调节的优点。
附图说明:
16.通过阅读参照以下附图对本实用新型的详细描述,本实用新型的其他特征、目的和优点将会变得更加明显:
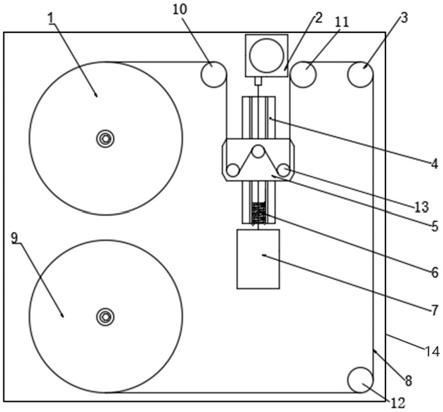
17.图1为本实用新型运丝结构示意图;
18.图2为本实用新型受力分析示意图;
19.图3为本实用新型控制流程图;
20.图中:1—第一丝筒,2—拉线式位移传感器,3—第三定导轮,4—导轨,5—连接件,6—阻挡弹簧,7—重锤,8—钼丝,9—第二丝筒,10—第一定导轮,11—第二定导轮,12—第四定导轮,13—动导轮,14—框架。
具体实施方式:
21.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于理解,下面结合具体实施方式,对本实用新型进一步进行阐述。
22.如图1—2所示,本实用新型提供一种基于重锤位移控制运丝速度的装置:包括第一丝筒1、第二丝筒9、拉线式位移传感器2、框架14、若干定导轮及若干动导轮,所述拉线式位移传感器2的下端引出的拉线连接有连接件5,连接件5的下端通过吊线悬挂有重锤7,连接件5安装于导轨4上,并能够沿导轨上下滑动;若干定导轮固定在框架14上,若干动导轮设置于连接件5上,第一丝筒1上缠绕有钼丝8,钼丝8从第一丝筒1引出后,经连接件5上的动导轮,再缠绕于第二丝筒9上。
23.所述拉线式位移传感器2、导轨4固定安装于框架14上。
24.所述连接件5的外立面设置有三个动导轮13,分别为第一动导轮、第二动导轮、第三动导轮,三个动导轮上下交错布置,钼丝8依次绕过这三个动导轮。
25.所述定导轮为4个,分别为第一定导轮10、第二定导轮11、第三定导轮3、第四定导轮12,钼丝8自第一丝筒1引出后,依次绕过第一定导轮10、连接件5上的三个动导轮13、第二定导轮11、第三定导轮3、第四定导轮12,再缠绕于第二丝筒9上。
26.所述第一定导轮10、第二定导轮11和第三定导轮3的外切线和第一丝筒1的外切线在同一水平线,第四定导轮12的外切线和第二丝筒的外切线9在同一水平线。
27.所述第一丝筒1、第二丝筒(9)以及定导轮、动导轮的芯轴相平行。
28.所述导轨4上设置有阻挡弹簧6,阻挡弹簧6位于连接件5下方。
29.如图3所示,机床启动后,重锤7到达该装置控制系统的设定位置后,以钼丝8顺时针工作为例控制系统赋予第一丝筒1与第二丝筒9相同的运行速度,第一丝筒1开始顺时针运转,第一丝筒1按设定的速度恒速运转,拉线式位移传感器2实时检测重锤7位置变化,如果位置不变,第二丝筒9以设定速度运行;如果重锤7位置变化,且为向上移动,保持第一丝筒1转速不变,第二丝筒9根据控制系统以小于设定速度的速度运行;如果重锤7位置变化,
且为向下移动,保持第一丝筒1转速不变,第二丝筒9根据控制系统以大于设定速度的速度运行,直至重锤7回到设定位置,丝筒运动直至切割任务完成,电源断电,丝筒停止运转,连接件5落到阻挡弹簧6上,工作结束。
30.对本实用新型保护范围的限制,所属领域技术人员应该明白,在本实用新型的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本实用新型的保护范围以内。
技术特征:
1.一种基于重锤位移控制运丝速度的装置,其特征在于:包括第一丝筒(1)、第二丝筒(9)、拉线式位移传感器(2)、框架(14)、若干定导轮及若干动导轮,所述拉线式位移传感器(2)的下端引出的拉线连接有连接件(5),连接件(5)的下端通过吊线悬挂有重锤(7),连接件(5)安装于导轨(4)上,并能够沿导轨上下滑动;若干定导轮固定在框架(14)上,若干动导轮设置于连接件(5)上,第一丝筒(1)上缠绕有钼丝(8),钼丝(8)从第一丝筒(1)引出后,经连接件(5)上的动导轮,再缠绕于第二丝筒(9)上。2.根据权利要求1所述的一种基于重锤位移控制运丝速度的装置,其特征在于:所述拉线式位移传感器(2)、导轨(4)固定安装于框架(14)上。3.根据权利要求1所述的一种基于重锤位移控制运丝速度的装置,其特征在于:所述连接件(5)的外立面设置有三个动导轮(13),分别为第一动导轮、第二动导轮、第三动导轮,三个动导轮上下交错布置,钼丝(8)依次绕过这三个动导轮。4.根据权利要求1所述的一种基于重锤位移控制运丝速度的装置,其特征在于:所述定导轮为4个,分别为第一定导轮(10)、第二定导轮(11)、第三定导轮(3)、第四定导轮(12),钼丝(8)自第一丝筒(1)引出后,依次绕过第一定导轮(10)、连接件(5)上的三个动导轮(13)、第二定导轮(11)、第三定导轮(3)、第四定导轮(12),再缠绕于第二丝筒(9)上。5.根据权利要求4所述的一种基于重锤位移控制运丝速度的装置,其特征在于:所述第一定导轮(10)、第二定导轮(11)和第三定导轮(3)的外切线和第一丝筒(1)的外切线在同一水平线,第四定导轮(12)的外切线和第二丝筒(9)的外切线在同一水平线。6.根据权利要求1、3、4、5任一所述的一种基于重锤位移控制运丝速度的装置,其特征在于:所述第一丝筒(1)、第二丝筒(9)以及定导轮、动导轮的芯轴相平行。7.根据权利要求1所述的一种基于重锤位移控制运丝速度的装置,其特征在于:所述导轨(4)上设置有阻挡弹簧(6),阻挡弹簧(6)位于连接件(5)下方。
技术总结
本实用新型公开了一种基于重锤位移控制运丝速度的装置,包括第一丝筒、第二丝筒、拉线式位移传感器、框架、若干定导轮及若干动导轮,所述拉线式位移传感器的下端引出的拉线连接有连接件,连接件的下端通过吊线悬挂有重锤,连接件安装于导轨上,并能够沿导轨上下滑动;若干定导轮固定在框架上,若干动导轮设置于连接件上,第一丝筒上缠绕有钼丝,钼丝从第一丝筒引出后,经连接件上的动导轮,再缠绕于第二丝筒上。本实用新型弥补了检测丝间张力装置较少的不足,通过调节丝筒转速,来使重锤达到并保持在预定理想位置,从而达到控制丝间张力恒定的目的。该装置同时具备调整周期比较长,方便调节的优点。便调节的优点。便调节的优点。
技术研发人员:邱明波 姚宗秀 王晓伟 邸一凡 汪旻阳 黄秋鹏
受保护的技术使用者:南京航空航天大学
技术研发日:2020.08.26
技术公布日:2021/9/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1