一种直线电机驱动的爪极零件拾取装置的制作方法
[0001]
本发明涉及拾取装置技术领域,尤其是一种直线电机驱动的爪极零件拾取装置。
背景技术:
[0002]
爪极零件是一种外形复杂且产量需求很高的零件。目前爪极零件的主要制造方式是通过锻压制造。典型的锻压装备如压力机等通过和模具的配合使用就可以快速地实现较复杂零件外形的成型同时对于金属零件微观晶粒的改善作用也十分明显,是生产复杂外形和高强度性能要求零件的主要手段。为了进一步提升压力机生产效率,就需要与之配合的上下料装备,而这一机电耦合的自动化装置也自然成为锻压装备研发的重点和难点。
[0003]
目前应用在压力机上的爪极零件送料主要采用人工送料和机器人送料两种方式。人工送料的过程中需要工人在压力机滑块抬升时取出模具上的工件并放入下一个工位。这种方式的弊端是显而易见。工人的工作效率慢,劳动强度高,对于爪极在模具中的定位主要依靠工人肉眼观察判断,且在多工位压力机这样一种重型机械工作环境中存在很多不安全因素。另一种方式是采用机器人。机器人技术在现今的发展已经很成熟。目前应用于压力机的机器人主要有摆动横杆式机械手、平行四连杆式机械手、六自由度机器人等。不论采用何种机器人,都需要与之配合的能抓取爪极零件的机械手爪。
[0004]
爪极零件由于存在极爪,因此其在放入模具中的时候不光需要位置定位还需要周向定位。目前的手爪主要有磁吸和机械式两种,但是目前的常规手爪只能实现位置定位而无法实现零件的周向定位,因此还需要增加额外的爪极零件旋转定位装置,这无疑增加了零件传送系统的复杂程度,延长了送料路径。而过多的工序还有可能影响生产节拍,降低生产效率。鉴于现在爪极零件上料用机械手爪存在的问题,需要一种更紧凑,更加高效的爪极零件夹持手爪,既能实现零件夹持也可以实现爪极零件的周向定位。
技术实现要素:
[0005]
本发明要解决的技术问题是:为了解决现有装置复杂、降低生产节拍,降低生产效率问题,本发明提供了一种直线电机驱动的爪极零件拾取装置,包括连接法兰组件、连接板组件、直线导轨组件、支撑架组件和滚轮组组件,所述连接法兰组件的一端通过所述连接板组件与所述直线导轨组件相连,所述支撑架组件靠近所述滚轮组组件,解决了现有上述问题。
[0006]
本发明解决其技术问题所采用的技术方案是:
[0007]
一种直线电机驱动的爪极零件拾取装置,包括连接法兰组件、连接板组件、直线导轨组件、支撑架组件和滚轮组组件,所述连接法兰组件的一端通过所述连接板组件与所述直线导轨组件相连,所述支撑架组件靠近所述滚轮组组件。
[0008]
具体的,所述连接法兰组件包括连接法兰和连杆,所述连接板组件包括支撑板、转轴和转动安装板,所述直线导轨组件包括直线电机定子、直线电机动子、直线运动框架、直线滑块和直线导轨。
[0009]
具体的,所述支撑架组件包括弹性柱、第一弹性柱支承架和第二弹性柱支撑架。
[0010]
具体的,所述滚轮组组件包括辅助支撑板、滚轮安装弧座和滚轮组。
[0011]
具体的,所述连杆将所述连接法兰和所述支撑板固定连接在一起,所述转轴和所述转动安装板与所述支撑板铰接,在所述转动安装板上安装有所述直线电机定子,与所述直线电机定子配合的所述直线电机动子安装在所述直线运动框架上,所述直线运动框架上安装有所述直线滑块,与所述直线滑块配合的所述直线导轨安装在所述转动安装板上,所述辅助支撑板与所述支撑板固定连接,所述滚轮安装弧座固定安装在所述辅助支撑板上,所述滚轮组安装在所述滚轮安装弧座上,所述第一弹性柱支承架和所述第二弹性柱支撑架固定安装在所述支撑板上。
[0012]
具体的,所述直线导轨组件还包括磨擦板,所述磨擦板安装在所述直线运动框架上。
[0013]
具体的,所述直线导轨组件还包括弹性柱卡扣,所述弹性柱穿过所述第一弹性柱支承架和所述第二弹性柱支撑架和所述弹性柱卡扣,所述弹性柱卡扣与直线运动框架铰接。
[0014]
本发明的有益效果是:本发明提供了一种直线电机驱动的爪极零件拾取装置,包括连接法兰组件、连接板组件、直线导轨组件、支撑架组件和滚轮组组件,所述连接法兰组件的一端通过所述连接板组件与所述直线导轨组件相连,所述支撑架组件靠近所述滚轮组组件,结构更紧凑,更加高效的爪极零件夹持手爪,既能实现零件夹持也可以实现爪极零件的周向定位。
附图说明
[0015]
下面结合附图和实施例对本发明进一步说明。
[0016]
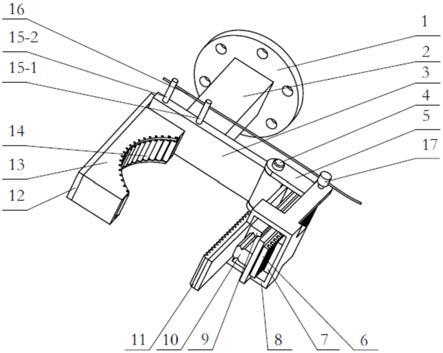
图1为本发明的结构示意图;
[0017]
图2为本发明夹持零件的示意图;
[0018]
图3为本发明加持零件后旋转和夹紧零件的方法示意图。
[0019]
图中:1连接法兰,2连杆,3支撑板,4转轴,5转动安装板,6直线电机定子,7直线电机动子,8直线运动框架,9直线滑块,10直线导轨,11磨擦板,12辅助支撑板,13滚轮安装弧座,14滚轮组,15-1第一弹性柱支承架,15-2 第二弹性柱支撑架,16弹性柱,17弹性柱卡扣,18爪极零件。
具体实施方式
[0020]
现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
[0021]
如图1-3所示,一种直线电机驱动的爪极零件拾取装置,包括连接法兰组件、连接板组件、直线导轨组件、支撑架组件和滚轮组组件,所述连接法兰组件的一端通过所述连接板组件与所述直线导轨组件相连,所述支撑架组件靠近所述滚轮组组件。
[0022]
所述连接法兰组件包括连接法兰1和连杆2,所述连接板组件包括支撑板3、转轴4和转动安装板5,所述直线导轨组件包括直线电机定子6、直线电机动子 7、直线运动框架8、直线滑块9和直线导轨10;所述支撑架组件包括弹性柱16、第一弹性柱支承架15-1和第二弹
性柱支撑架15-2;所述滚轮组组件包括辅助支撑板12、滚轮安装弧座13和滚轮组14;所述连杆2将所述连接法兰1和所述支撑板3固定连接在一起,所述转轴4和所述转动安装板5与所述支撑板3铰接,在所述转动安装板5上安装有所述直线电机定子6,与所述直线电机定子6 配合的所述直线电机动子7安装在所述直线运动框架8上,所述直线运动框架8 上安装有所述直线滑块9,与所述直线滑块9配合的所述直线导轨10安装在所述转动安装板5上,所述辅助支撑板12与所述支撑板3固定连接,所述滚轮安装弧座13固定安装在所述辅助支撑板12上,所述滚轮组14安装在所述滚轮安装弧座13上,所述第一弹性柱支承架15-1和所述第二弹性柱支撑架15-2固定安装在所述支撑板3上。所述直线导轨组件还包括磨擦板11,所述磨擦板11安装在所述直线运动框架8上。所述直线导轨组件还包括弹性柱卡扣17,所述弹性柱16穿过所述第一弹性柱支承架15-1和所述第二弹性柱支撑架15-2和所述弹性柱卡扣17,所述弹性柱卡扣17与直线运动框架8铰接。
[0023]
如图2所示,当爪极零件18靠在滚轮组14上后,只要通过磨擦板11给爪极零件18施加一个切向摩擦力就可推动爪极零件18转动,从而实现爪极零件 18的周向定位。
[0024]
如图3所示,第一弹性柱支承架15-1和第二弹性柱支撑架15-2固定安装在支撑板3上,弹性柱16穿过第一弹性柱支承架15-1、第二弹性柱支撑架15-2 和弹性柱卡扣17,弹性柱卡扣17与直线运动框架8铰接。这样,当直线电机工作推动磨擦板11向图中的左侧方向移动时,爪极零件18被旋转,同时由于直线运动框架8也向左侧移动,弹簧卡口17也就向左侧运动,进而将弹性柱16 压弯,而弹性柱16的弯曲所产生的反作用力也推动磨擦板11对爪极零件18施加一个径向力压紧爪极零件。
[0025]
本发明的工作原理为:
[0026]
初始状态下,如图1所示,直线电机定子6与直线电机动子7驱动直线运动框架8运动,在直线运动框架8上的弹性柱卡扣17由于受到弹性柱16的限制,使得弹性柱卡扣17和第一弹性柱支承架15-1、第二弹性柱支撑架15-2处在共线的位置之上。以上结构就使得当直线电机工作时,磨擦板11可以绕着转轴4进行旋转,进而改变磨擦板11和滚轮组14之间的距离。初始状态下磨擦板11和滚轮组14之间的距离略大于爪极零件18的直径。当机器人控制着本发明运动到爪极零件18上时,如图2所示,直线电机控制着磨擦板11接触到爪极零件18。如图3所示,直线电机继续工作,由于磨擦板11和滚轮组14之间有爪极零件18的限位,磨擦板11和滚轮组14之间的距离不再减小,而直线电机的继续运动就推动弹簧住卡扣17向连接法兰1方向运动并压迫弹性柱16弯曲,该弯曲的反作用力使磨擦板11可以压紧爪极零件18,同时磨擦板11的直线运动也可以实现爪极的周向旋转和定位。
[0027]
之后本发明将爪极零件18放置在模具中,由于爪极零件18的爪极卡入模具,因此在直线电机反向运动控制磨擦板11松开爪极零件11时,爪极零件18 不会旋转,磨擦板11彻底松开爪极零件18后零件放置完成,本发明在工业机器人的操作下可以归位并等待下一个工作循环。
[0028]
以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1