一种传感器激光焊接装置的制作方法
1.本实用新型涉及传感器焊接技术领域,具体涉及一种传感器激光焊接装置。
背景技术:
2.激光焊接技术是一种高新技术,由于其独有的特点,特别适合在传感器密封焊中使用,目前国外许多生产传感器的厂家均利用激光焊接工艺生产传感器,而国内采用此工艺的厂家不多,主要是一些生产军用传感器产品的厂家和部分科研机构在采用此种工艺,且采用国外激光焊接机的较多。
3.现有技术中的激光焊接,通常自动化程度较低,生产效率较低。
技术实现要素:
4.因此,本实用新型要解决的技术问题在于克服现有技术中自动化不完全形成的缺陷,从而提供一种传感器激光焊接装置。
5.本实用新型的上述技术目的是通过以下技术方案得以实现的:
6.一种传感器用激光焊接装置,包括机架、上料组件、预夹紧组件、移动组件、定位组件、焊接组件及收料组件,所述机架用于支撑所述传感器用激光焊接装置,所述移动组件设置有两个,其中一所述移动组件位于所述上料组件及所述预夹紧组件之间,另一所述移动组件位于所述预夹紧组件、所述定位组件、所述焊接组件及所述收料组件一侧。
7.优选的,所述上料组件固定在所述机架长度方向一端,所述上料组件包括两个振动上料机及位于振动上料机一侧的物流轨道。
8.优选的,所述移动组件包括第一移动部,所述第一移动部设置在所述上料组件及所述预夹紧组件之间,所述第一移动部包括横板及驱动结构,所述驱动结构用于驱动所述横板沿竖直方向及水平方向滑移设置,所述横板指向所述上料组件一侧设置有两个第一夹持装置。
9.优选的,所述移动组件包括第二移动部,所述第二移动部包括水平设置的抵持板,所述抵持板上突出设置有水平滑块,所述第二移动部还包括沿所述水平滑块滑移设置的滑移板,所述滑移板上设置有若干固定装置,每一所述固定装置上分别对应一第二夹持组件,所述第二夹持组件水平设置并且指向背离所述滑移板设置,所述第二夹持组件沿所述固定装置的竖直方向滑移设置。
10.优选的,所述预夹紧装置包括铆接工位及铆接模具,所述铆接模具与所述铆接工位共线设置,并且所述铆接工位与所述铆接模具相对滑移设置,所述铆接模具指向所述铆接工位一侧设置有固定孔。
11.优选的,所述定位组件包括定位支架及位于定位支架上的定位工位及压板,所述定位工位位于所述压板的下方,所述定位工位上设置有与所述毛细管相互匹配的定位槽,所述定位支架上设置有驱动所述定位工位沿竖直方向位于的第二气缸。
12.优选的,所述焊接组件包括夹持部及焊接部,所述夹持部用于夹持并固定所述毛
细管,所述焊接部包括竖直设置的限位轨道、转盘及焊接头,所述转盘沿所述限位轨道的竖直方向滑移设置,所述焊接头转动设置在所述转盘上,并且沿所述转盘的轴线方向转动设置。
13.优选的,所述收料装置设置在所述机架长度方向一端,所述收料装置包括收料盒,所述收料盒固定设置在所述机架上。
14.上述所述的一种传感器用激光焊接装置,通过两个移动组件的设置,将各个工位之间紧密结合,有效地实现了自动化生产,从而有效地提升了生产的效率;并且通过预夹紧组件的设置,在进行焊接之前对毛细管及盲盖进行三点式预夹紧,避免焊接过程中盲盖在毛细管内移动,影响焊接效果。
附图说明
15.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
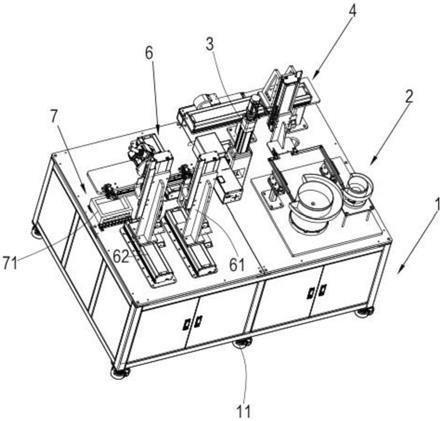
16.图1为本实用新型的一种实施方式中传感器用激光焊接装置的结构示意图;
17.图2为本实用新型的一种实施方式中传感器用激光焊接装置另一角度的结构事示意图;
18.图3为本实用新型一实施方式中上料组件的结构示意图;
19.图4为本实用新型一实施方式中预夹紧组件的结构示意图;
20.图5为本实用新型一实施方式中第一移动部的结构示意图;
21.图6为本实用新型一实施方式中第二移动部的结构示意图;
22.图7为本实用新型一实施方式中定位组件的结构示意图;
23.图8为本实用新型一实施方式中焊接组件上焊接部的结构示意图。
24.附图标记说明:
25.1、机架;11、万向轮;12、风扇散热孔;121、扇罩;2、上料组件;21、承接板;22、振动上料机;221、固定板;222、限位槽;2221、连杆;2222、固定螺母;23、物流轨道;231、第一侧臂;2311、支撑架;232、第二侧臂;2321、限位板;3、预夹紧组件;31、固定架;311、电机;32、铆接工位;321、铆接夹紧孔;33、铆接模具;331、固定孔;34、驱动气缸;4、移动组件;41、第一移动部;411、横板;4111、第一夹持装置;412、驱动结构;4121、水平轨道;4122、竖直轨道;413、定位板;42、第二移动部;421、抵持板;4211、延伸块;4212、凹槽;422、水平滑块;423、滑移板;424、第二夹持组件;425、滑移组件;4251、凸块;5、定位组件;51、定位支架;511、第二气缸;52、定位工位;521、定位槽;53、定位压板;6、焊接组件;61、夹持部;62、焊接部;621、限位轨道;6211、限位装置;622、转盘;623、焊接头;624、横设轨道;7、收料组件;71、收料盒。
具体实施方式
26.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
27.请参阅图1和图2,一种传感器用激光焊接装置,包括机架1、上料组件2、预夹紧组件3、移动组件4、定位组件5、焊接组件6、收料组件7及控制组件,所述机架1用于支撑所述传感器用激光焊接装置,所述上料组件2、所述预夹紧组件3、所述移动组件4、所述定位组件5、所述焊接组件6、所述收料组件7及所述控制组件分别固定在所述机架1上方,所述上料组件2用于所述毛细管及所述盲盖的传输,所述预夹紧组件3用于对所述毛细管及所述盲盖进行初步的预夹紧,在一实施方式中,所述预夹紧组件3为三点式预夹紧,所述定位组件5用于检测机固定预夹紧后的毛细管,所述焊接组件6用于焊接所述毛细管及所述盲盖,所述收料组件7用于接收焊接完成的毛细管,所述移动组件4用于控制毛细管在各个工位之间移动。在一实施方式中,所述预夹紧组件3、所述定位组件5、所述焊接组件6及所述收料组件7之间的距离相等。
28.在一实施方式中,请参阅图1和图2,所述机架1呈长方体设置,在所述机架1的底部设置有若干万向轮11,所述机架1其中一侧侧壁设置有风扇散热孔12,所述风扇散热孔12内侧设置有风扇,所述风扇散热孔12上设置有覆盖所述风扇散热孔12的扇罩121。
29.请参阅图3,所述上料组件2固定在所述机架1长度方向一端,所述上料组件2包括承接板21、两个振动上料机22及与所述振动上料机22相互对应的物流轨道23。所述承接板21固定设置在机架1上,在一实施方式中,所述承接板21为水平设置的长方形板材,两个所述振动上料机22固定设置在所述承接板21上,所述物流轨道23设置有两个,并且分别设置在相互对应的振动上料机22上。
30.请参阅图3,在一实施方式中,其中一振动上料机22底部设置有固定板221,所述振动上料机22固定设置在所述固定板221上,所述固定板221四周边角处向下延伸设置有连杆2221,所述连杆2221固定设置在所述承接板21上,所述固定板221上设置有限位槽222,所述连杆2221贯穿所述限位槽222设置,并且,在一实施方式中,所述限位槽222长度方向尺寸大于所述连杆2221外径,所述连杆2221沿所述限位槽222的长度方向滑移设置,在一实施方式中,所述连杆2221在位于所述固定板221的上下两侧分别设置有固定螺母2222,所述连杆2221通过固定螺母2222固定设置在所述固定板221上。
31.请参阅图3,所述物流轨道23包括相互垂直的第一侧臂231及第二侧臂232,所述第一侧臂231指向相对应的振动上料机22,所述第二侧臂232位于所述第一侧侧臂背离所述振动上料机22一侧,并且在一实施方式中,两个所述物流轨道23的第二侧臂232指向相对设置。所述第一物流轨道23及所述第二物流轨道23在竖直方向上的截面为u形设置,并且u形开口指向向上,在一实施方式中,请参阅图2,所述第二侧臂232顶部还设置有限位板2321,所述限位板2321用于对位于所述第二侧臂232内的盲盖及毛细管进行限位。
32.在一实施方式中,请参阅图3,所述第一侧臂231底部设置有支撑架2311,所述支撑架2311用于支撑所述物流轨道23的第一侧臂231,以使其保持水平放置。
33.请参阅图4,所述预夹紧组件3包括固定架31、铆接工位32及铆接模具33,所述铆接模具33与所述铆接工位32共线设置,所述铆接模具33与所述铆接工位32分别位于设置在所述固定架31上,所述铆接模具33与所述铆接工位32相对滑移设置,在一实施方式中,所述铆接工位32固定设置在所述固定架31的顶部,所述铆接模具33位于所述铆接工位32的下方,并且所述铆接模具33沿竖直方向滑移设置在所述固定架31上,所述固定架31上设置有驱动所述铆接模具33滑移的驱动气缸34。
34.在一实施方式中,所述铆接模具33顶部设置有固定孔331,所述固定孔331用于固定所述毛细管,在一实施方式中,所述固定孔331的横截面积沿竖直方向向下逐渐缩小。
35.在一实施方式中,所述固定架31上还设置有电机311,所述电机311用于驱动所述铆接工位32转动设置在所述固定架31上。所述铆接工位32上包括铆接夹紧孔321,所述铆接夹紧孔321顶部呈圆台形设置。
36.请参阅图5和图6,所述移动组件4设置有两个,两个所述移动组件4分别为第一移动部41和第二移动部42,其中所述第一移动部41设置在所述上料组件2及所述预夹紧组件3之间,所述第二移动部42设置在所述预夹紧组件3及所述定位组件5、所述焊接组件6、所述收料组件7的一侧,用以将待焊接的毛细管在各个工位之间位移。
37.请参阅图5,在一实施方式中,所述第一移动部41包括横板411及驱动结构412,所述驱动结构412用于驱动所述横板411沿竖直方向及水平方向滑移设置,请参阅图1,在一实施方式中,所述横板411水平设置,并且所述横板411指向所述上料组件2一侧设置有两个第一夹持装置4111,所述第一夹持装置4111包括手指气缸,用于夹持上料组件2上的毛细管及盲盖。
38.所述驱动结构412包括水平轨道4121及竖直轨道4122,其中所述竖直轨道4122沿所述水平轨道4121的长度方向滑移设置,所述横板411沿所述竖直轨道4122的高度方向滑移设置。所述第一移动部41用于驱动所述横板411在竖直方向及水平方向上的滑移,在一实施方式中,所述竖直轨道4122上设置有定位板413,所述定位板413与所述横板411相互垂直设置,所述定位板413与所述横板411之间还设置有加强筋。
39.请参阅图6,所述第二移动部42包括水平设置的抵持板421,所述抵持板421上突出设置有水平滑块422,所述第二移动部42还包括沿所述水平滑块422滑移设置的滑移板423,所述滑移板423上设置有若干固定装置,每一所述固定装置上分别对应一第二夹持组件424,所述第二夹持组件424水平设置并且指向背离所述滑移板423设置,所述第二夹持组件424沿所述固定装置的竖直方向滑移设置。在一实施方式中,相邻所述固定装置之间的距离与所述预夹紧组件3及所述定位组件5之间的距离、所述抵持板421的位移距离三者相等。所述抵持板421往复运动。
40.在一实施方式中,所述抵持板421下方设置有驱动所述抵持板421沿垂直于其自身长度方向滑移的滑移组件425,所述抵持板421长度方向两端分别设置有凸块4251,所述凸块4251沿垂直于所述抵持板421长度方向设置,所述抵持板421向下延伸设置有延伸块4211,所述延伸块4211上设置有与所述凸块4251相互匹配的凹槽4212。
41.请参阅图7,所述定位组件5竖直设置,所述定位组件5包括定位支架51及位于定位支架51上的定位工位52及压板,所述定位工位52位于所述压板的下方,所述定位工位52上设置有与所述毛细管相互匹配的定位槽521,所述定位支架51上设置有驱动所述定位工位52沿竖直方向位于的第二气缸511。
42.请参阅图1和图8所述焊接组件6设置在所述定位组件5背离所述预夹紧组件3一侧,在一实施方式中,请参阅图1,所述焊接组件6包括夹持部61及焊接部62,所述夹持部61用于夹持并固定所述毛细管,所述焊接部62包括竖直设置的限位轨道621、转盘622及焊接头623,所述转盘622沿所述限位轨道621的竖直方向滑移设置,所述焊接头623转动设置在所述转盘622上,并且沿所述转盘622的轴线方向转动设置,在一实施方式中,所述转盘622
的轴线方向垂直于所述焊接头623的长度方向。
43.在一实施方式中,所述限位轨道621底部设置有限位装置6211,所述限位装置6211呈u形设置,并且u形开口指向向下,所述机架1上设置有嵌设在所述u形开口内的横设轨道624,所述限位轨道621沿所述横设轨道624的长度方向滑移设置,在一实施方式中,所述横设轨道624垂直于所述抵持板421的长度方向设置。
44.所述收料装置设置在所述机架1长度方向一端,在一实施方式中,所述收料装置包括收料盒71,所述收料盒71固定设置在所述机架1上。
45.本技术提供的一种传感器用激光焊接装置,通过两个移动组件4的设置,将各个工位之间紧密结合,有效地实现了自动化生产,从而有效地提升了生产的效率;并且通过预夹紧组件3的设置,在进行焊接之前对毛细管及盲盖进行三点式预夹紧,避免焊接过程中盲盖在毛细管内移动,影响焊接效果。
46.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本实用新型创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1