机器人手臂夹具的制作方法
1.本实用新型涉及机器人技术领域,具体是一种机器人手臂夹具。
背景技术:
2.关节机器人,也称关节手臂机器人或关节机械手臂,是当今工业领域中最常见的工业机器人的形态之一,适合用于诸多工业领域的机械自动化作业,比如,自动装配、喷漆、搬运、焊接等工作。
3.关节机器人可分为五轴和六轴关节机器人、托盘关节机器人以及平面关节机器人。其中一个部件为机器人手臂,如图5所示,其一端设有两个对称布置的均设有铰接孔的第一铰接座(10),另一端设有呈对称布置的第二铰接座(20)和固定座(30)。机器人手臂进行铣面、镗孔、钻孔、攻螺纹这些工序,需要进行多次定位装夹,导致加工精度不高。因此如何克服上述缺陷,成为了本公司亟待解决的问题。
技术实现要素:
4.本实用新型要解决的技术问题是:为克服上述缺陷,本实用新型公开了一种机器人手臂夹具。
5.本实用新型提供一种机器人手臂夹具,包括底板,所述底板上设有:
6.第一固定结构,位于所述底板一端,用于支撑第一铰接座的底部、压紧所述第一铰接座的顶部以及顶紧所述第一铰接座的侧部;
7.第二固定结构,位于所述底板另一端,用于夹紧第二铰接座;
8.第三固定结构,位于所述底板另一端,用于夹紧固定座;
9.支撑组件,位于所述底板另一端,用于支撑机器人手臂。
10.机器人手臂一端通过第一固定结构限位固定,另一端通过第二固定结构、第三固定结构和支撑组件限位固定;本实用新型通过一次固定装夹,就能进行铣面、镗孔、钻孔、攻螺纹这些工序,不仅提高了加工精度,还提高了加工效率。
11.进一步地,所述第一固定结构包括呈凸字形的第一支座,所述第一支座双肩部设有支撑所述第一铰接座底部的第一支撑螺杆,所述第一支座凸起部位于所述第一铰接座之间,并设有压板,用于压紧所述第一铰接座上端;所述第一支座两侧还设有第一顶紧螺栓,用于顶紧机器人手臂侧部。如此设置,实现机器人手臂一端纵向和横向固定,结构简单。
12.进一步地,所述第二固定结构包括第二支座,所述第二支座上设有顶紧板和第二顶紧螺栓,所述顶紧板通过两个螺杆与所述第二支座螺纹连接,所述顶紧板与所述第二顶紧螺栓夹紧所述第二铰接座。如此设置,顶紧板和第二顶紧螺栓均可调节,便于第二铰接座固定。
13.进一步地,所述第三固定结构包括第三支座,所述第三支座上端设有两个夹块,用于夹紧所述固定座。如此设置,结构简单。
14.进一步地,所述第三支座上还设有第三顶紧螺栓,用于顶紧所述固定座端部外壁。
第三顶紧螺栓对机器人手臂纵向进行限位,便于机器人手臂安装。
15.进一步地,所述支撑组件包括第四支座,所述第四支座上端螺纹连接有第二支撑螺杆。第二支撑螺杆通过拧旋可调节高度,从而便于支撑机器人手臂。
附图说明
16.下面结合附图和实施例对本实用新型进一步说明。
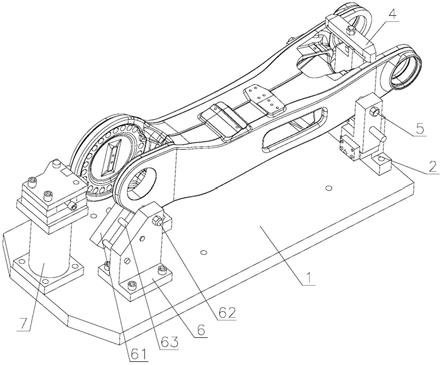
17.图1是本实用新型的结构示意图;
18.图2是本实用新型的俯视图;
19.图3是本实用新型的主视图;
20.图4是本实用新型的右视图;
21.图5是机器人手臂的结构示意图;
22.图中:1、底板;2、第一支座;3、第一支撑螺杆;4、压板;5、第一顶紧螺栓;6、第二支座;7、第三支座;8、第四支座;61、顶紧板;62、第二顶紧螺栓;63、螺杆;71、夹块;72、第三顶紧螺栓;81、第二支撑螺杆;10、第一铰接座;20、第二铰接座;30、固定座。
具体实施方式
23.现在结合附图对本实用新型作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
24.如图1所示,本实用新型是一种机器人手臂夹具,包括底板1,底板1一端设有第一固定结构,如图4所示,第一固定结构包括呈凸字形的第一支座2,第一支座2双肩部设有支撑第一铰接座10下端的第一支撑螺杆3,第一支座2凸起部位于第一铰接座10之间,并设有压板4,用于压紧第一铰接座10上端;第一支座2两侧还设有第一顶紧螺栓5,用于顶紧机器人手臂侧部。如此设置,实现机器人手臂一端纵向和横向固定。
25.底板1另一端设有第二固定结构、第三固定结构和支撑组件。
26.如图1所示,第二固定结构包括第二支座6,第二支座6上设有顶紧板61和第二顶紧螺栓62,顶紧板61通过两个螺杆63与第二支座6螺纹连接,顶紧板61与第二顶紧螺栓62夹紧第二铰接座20。如此设置,顶紧板61和第二顶紧螺栓62均可调节,便于第二铰接座20固定。
27.如图1和图2所示,第三固定结构包括第三支座7,第三支座7上端设有两个夹块71,用于夹紧固定座30。第三支座7上还设有第三顶紧螺栓72,用于顶紧固定座30端部外壁。第三顶紧螺栓72对机器人手臂纵向进行限位,便于机器人手臂安装。
28.如图3所示,支撑组件包括第四支座8,第四支座8上端螺纹连接有第二支撑螺杆81。第二支撑螺杆81通过拧旋可调节高度,从而便于支撑机器人手臂另一端。
29.机器人手臂一端通过第一固定结构限位固定,另一端通过第二固定结构、第三固定结构和支撑组件限位固定;本实用新型通过一次固定装夹,就能进行铣面、镗孔、钻孔、攻螺纹这些工序,不仅提高了加工精度,还提高了加工效率。
30.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
技术特征:
1.一种机器人手臂夹具,其特征在于:包括底板(1),所述底板(1)上设有:第一固定结构,位于所述底板(1)一端,用于支撑第一铰接座(10)的底部、压紧所述第一铰接座(10)的顶部以及顶紧所述第一铰接座(10)的侧部;第二固定结构,位于所述底板(1)另一端,用于夹紧第二铰接座(20);第三固定结构,位于所述底板(1)另一端,用于夹紧固定座(30);支撑组件,位于所述底板(1)另一端,用于支撑机器人手臂。2.根据权利要求1所述的机器人手臂夹具,其特征在于:所述第一固定结构包括呈凸字形的第一支座(2),所述第一支座(2)双肩部设有支撑所述第一铰接座(10)底部的第一支撑螺杆(3),所述第一支座(2)凸起部位于所述第一铰接座(10)之间,并设有压板(4),用于压紧所述第一铰接座(10)上端;所述第一支座(2)两侧还设有第一顶紧螺栓(5),用于顶紧机器人手臂侧部。3.根据权利要求1所述的机器人手臂夹具,其特征在于:所述第二固定结构包括第二支座(6),所述第二支座(6)上设有顶紧板(61)和第二顶紧螺栓(62),所述顶紧板(61)通过两个螺杆(63)与所述第二支座(6)螺纹连接,所述顶紧板(61)与所述第二顶紧螺栓(62)夹紧所述第二铰接座(20)。4.根据权利要求1所述的机器人手臂夹具,其特征在于:所述第三固定结构包括第三支座(7),所述第三支座(7)上端设有两个夹块(71),用于夹紧所述固定座(30)。5.根据权利要求4所述的机器人手臂夹具,其特征在于:所述第三支座(7)上还设有第三顶紧螺栓(72),用于顶紧所述固定座(30)端部外壁。6.根据权利要求1所述的机器人手臂夹具,其特征在于:所述支撑组件包括第四支座(8),所述第四支座(8)上端螺纹连接有第二支撑螺杆(81)。
技术总结
本实用新型提供一种机器人手臂夹具,包括底板,所述底板上设有:第一固定结构,位于所述底板一端,用于支撑第一铰接座的底部、压紧所述第一铰接座的顶部以及顶紧所述第一铰接座的侧部;第二固定结构,位于所述底板另一端,用于夹紧第二铰接座;第三固定结构,位于所述底板另一端,用于夹紧固定座;支撑组件,位于所述底板另一端,用于支撑机器人手臂。机器人手臂一端通过第一固定结构限位固定,另一端通过第二固定结构、第三固定结构和支撑组件限位固定;本实用新型通过一次固定装夹,就能进行铣面、镗孔、钻孔、攻螺纹这些工序,不仅提高了加工精度,还提高了加工效率。还提高了加工效率。还提高了加工效率。
技术研发人员:顾易解 李红芳 王猛 李新芳
受保护的技术使用者:江苏万盛铸造有限公司
技术研发日:2020.12.31
技术公布日:2021/10/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1