一种单手操作的模具旋转式装卸装置
1.本发明属于精密光学模具装夹领域,具体涉及一种单手操作的模具旋转式装卸装置
背景技术:
2.国内在非全自动化光学元件精密模压设备上进行模具装卸时,加热腔内温度较高,对模具的摆放角度有要求,通常是由操作员徒手操作,效率低且存在一定的安全风险。本发明采用一种单手操作的模具旋转式装卸装置,能实现单手完成模具装卸工作,解决操作员徒手操作低效率、安全性差等问题。
技术实现要素:
3.本发明旨在提供一种单手操作的模具旋转式装卸装置,针对任意角度摆放的模具实现单手装卸。该设备能提高工作效率和安全性。
4.为实现本发明目的采用的技术方案:提供一种单手操作的模具旋转式装卸装置,其特征在于:本设备由夹持基板、滑轨基座、滑轨、夹持爪、圆弧垫块、弹簧、弹簧座、绳索、滑轮、滑轮座、皮带轮、支持杆、皮带、转轮、手柄加强块、手柄、棘轮和止动爪等组成。其工作流程如下:
5.1、操作员手持手柄,用食指拨动转轮,转轮通过皮带带动夹持部件转动,通过该方式可使夹持部件转到对应模具的角度。
6.2、对准模具后将夹持爪套到模具上,向后转动棘轮收紧绳索,此时止动爪在棘轮齿背上划过,绳索经过两组滑轮装置带动夹持爪向内收缩,抓紧模具。
7.3、确认收紧伸缩后可放开棘轮,此时棘轮由于受到绳索拉力的作用有向前转动的趋势,但是止动爪会阻止棘轮向前转动,保持绳索的绷紧状态,最终达到保持夹持爪夹紧力从而夹紧模具的目的。
8.4、将模具移动到合适位置后,拨动转轮,转轮通过皮带传动带动夹持部件转动,将模具旋转到合适的方向。
9.5、向后拨动止动爪,棘轮失去止动爪约束后向前转动松开绳索,两个夹持爪在弹簧的拉力作用下向两边分开,放下模具。
10.6、向前拨动止动爪,使其搭在棘轮上,本设备恢复初始状态。
11.7、本设备包含皮带传动,滑轮传动,棘轮制动,可高效且安全的实现非自动化精密模压设备中模具的装卸过程。
12.本发明所提供的一种单手操作的模具旋转式装卸装置,与现有技术相比,主要特点和效果在于:
13.1.采用皮带传动可从通过拨动手柄处转轮实现夹持部件的转动,便于调整模具装卸时的方向。
14.2.夹紧模具主要通过滑轮组和棘轮机构,向后转动棘轮即可夹紧模具,且松手后
棘轮受止动爪作用停止转动,从而保持夹紧力,无需长时间用力,减少操作员工作强度。
15.3.夹持爪夹持部分始终保持平行状态,可有效夹持多种尺寸模具。
附图说明
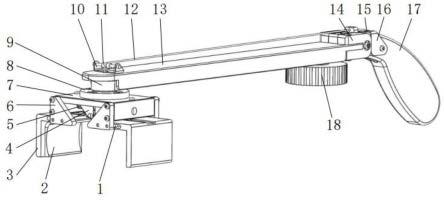
16.图1为本发明一种单手操作的模具旋转式装卸装置示意图。
17.图2为本发明夹持部件示意图。
18.图3为本发明手柄部件示意图。
19.图中:1滑轨;2圆弧垫块;3夹持爪;4小滑轮座;5弹簧;6滑轨基座;7夹持基板;8皮带轮;9皮带;10大滑轮座;11滑轮;12绳索;13支持杆;14手柄加强块;15棘轮;16止动爪;17手柄;18转轮;19弹簧座
具体实施方式
20.下面结合说明书附图和具体实施方式对本发明做进一步说明。
21.参见图1—图3,本发明提出一种单手操作的模具旋转式装卸装置由夹持基板7、滑轨基座6、滑轨1、夹持爪3、圆弧垫块2、弹簧5、弹簧座19、绳索12、滑轮11、大滑轮座10、皮带轮8、支持杆13、小滑轮座4、皮带9、转轮18、手柄加强块14、手柄17、棘轮15和止动爪16组成。
22.参见图1,皮带9套在皮带轮8和转轮18上;夹持基板7固定在皮带轮8上;滑轨基座6安装在夹持基板7上;滑轨1安装在滑轨基座6上;夹持爪3套在滑轨1上,可自由滑动;圆弧垫块2贴在夹持爪3上。
23.参见图2,弹簧座19固定在夹持爪3上,一边连接绳索12,另一边安装弹簧5;弹簧5一边连在弹簧座19上,另一边固定在夹持基板7上。
24.参见图3,棘轮15安装在手柄17上;绳索12末端连接在棘轮15上;止动爪16安装在手柄17上,可以上下拨动止动爪16使其紧贴或离开棘轮15。
25.参见图1—3,绳索12一端连接弹簧座19,通过两组滑轮11最后连接到手柄部件中的棘轮15上;
26.以下结合典型装卸模具流程对本发明做充分说明:
27.以小型非全自动化光学元件精密模压设备安装模具为例,装模具时,操作员握住手柄17,用大拇指向前拨动止动爪16,使其贴在棘轮15上;操作员拿起本设备将夹持爪3套在模具上,大拇指向后转动棘轮15,通过绳索12收紧力的作用带动夹持爪3向内运动,从而夹紧模具,圆弧垫块可以保证模具受力均匀,防止损坏模具;确保夹紧模具后松开棘轮15,此时棘轮15受绳索12拉力作用有向前转动的趋势,止动爪16可以钩住棘轮15使其无法向前转动,保证夹持爪夹紧模具;操作员通过该设备夹起模具后将模具放入模压设备中,食指拨动转轮18,通过皮带9带动皮带轮8转动,从而带动整个夹持部件及模具转动,调整到合适角度;将模具调整到合适的位置和角度后,大拇指向后拨动止动爪16,使其离开棘轮15,棘轮15失去止动爪16约束后受绳索12拉力的作用向前转动,绳索12松开,夹持爪3在弹簧5拉力作用下向两边分开,模具被放下,完成安装;
28.本设备包含皮带传动,滑轮传动,棘轮制动,可高效且安全的实现非自动化精密模压设备中模具的装卸过程。
29.应当指出,上述仅为实现本发明目的的一个较佳实施案例,用于例证而非全部。对
于在本发明内容实质的基础上做出的等效变形和替代,均应包括在本发明的保护范围之中。
技术特征:
1.一种单手操作的模具旋转式装卸装置,包括夹持基板(7)、滑轨基座(6)、滑轨(1)、夹持爪(3)、圆弧垫块(2)、弹簧(5)、弹簧座(19)、绳索(12)、滑轮(11)、大滑轮座(10)、皮带轮(8)、支持杆(13)、小滑轮座(4)、皮带(9)、转轮(18)、手柄加强块(14)、手柄(17)、棘轮(15)和止动爪(16)。2.根据权利要求1所述的一种单手操作的模具旋转式装卸装置,其特征在于:可以通过转动转轮(18),带动前端皮带轮(8)下安装的夹持部件及被夹持模具的转动,便于调整模具安装角度。3.根据权利要求1所述的一种单手操作的模具旋转式装卸装置,其特征在于:通过绳索(12)受力时带动夹持爪(3)在滑轨(1)上向内运动,夹紧模具;绳索(12)被放松时,弹簧(5)带动夹持爪(3)在滑轨(1)上向外运动,放开模具。4.根据权利要求1所述的一种单手操作的模具旋转式装卸装置,其特征在于:绳索(12)末端连接在棘轮(15)上,通过向后转动棘轮(15)即可收紧绳索(12),止动爪(16)可保证棘轮单向转动。
技术总结
本发明属于精密光学模具装夹领域,具体涉及一种单手操作的模具旋转式装卸装置。本设备由夹持基板、滑轨基座、滑轨、夹持爪、圆弧垫块、弹簧、弹簧座、绳索、滑轮、滑轮座、皮带轮、支持杆、皮带、转轮、手柄加强块、手柄、棘轮和止动爪等组成。本设备采用皮带传动可从通过拨动手柄处转轮实现夹持部件的转动,便于调整模具装卸时的方向,夹紧模具主要通过滑轮组和棘轮机构,可保持夹紧力,减少操作员工作强度,提高工作效率;同时使操作员避免与模压设备的加热炉近距离接触,减少安全风险。减少安全风险。减少安全风险。
技术研发人员:余剑武 许斌超 王峰
受保护的技术使用者:湖南大学
技术研发日:2021.05.19
技术公布日:2022/11/22
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1