一种带有伺服电机驱动装置的水冷动臂的制作方法
1.本发明涉及焊钳的动臂设计领域,尤其涉及一种带有伺服电机驱动装置的水冷动臂。
背景技术:
2.目前现有技术电阻焊领域中,驱动装置均采用电动缸部件作为传动部件,在电动缸推杆一端设置动力电极臂,其电极臂冷却水路结构均采用回水管内安装进水管,通水量较小,其内部设计空间有限产生水路阻碍不能及时对电极帽进行冷却使得在焊接过程中,电极帽易与待焊件粘合或焊穿等问题。同时,电动缸部件本身体积大,重量重,使得电阻焊钳结构的设计复杂,不便于更换和维护,也不利于电阻焊钳小型化的实现。
技术实现要素:
3.本发明内容的目的是为了解决现有技术的缺点和不足,而提出的一种带有伺服电机驱动装置的水冷动臂。
4.为了实现上述目的,本发明采用了一下技术方案:一种带有伺服电机驱动装置的水冷动臂,包括动臂,动臂上安装有电极杆、电极杆上安装有电极帽,动臂上固定安装有螺母法兰,螺母法兰内部设有贯穿设置的内螺纹并螺合有丝杆,驱动装置通过丝杆连接并驱动螺母法兰,以驱动动臂滑动;所述动臂内部设有水冷循环系统构成水冷动臂,动臂由驱动装置通过丝杆驱动;所述水冷循环系统设置于动臂内。
5.优选的,驱动装置为伺服电机,伺服电机通过减速机传动连接至丝杆。
6.优选的,动臂包括动臂外壳、嵌套件,动臂外壳包括其内部贯穿设置的通孔,其通孔的一端固定密封安装有电极杆、另一端嵌入嵌套件,嵌套件右端外壁与动臂外壳密封、固定连接;所述电极杆上安装有电极帽,电极杆带有贯穿孔,电极杆的外壁与动臂外壳密封、左端与电极帽密封、嵌套件的左端指向电极杆右端的贯穿孔内;所述嵌套件右端面开设有沉孔,丝杆伸入该沉孔内,丝杆外壁与嵌套件之间不接触不干扰;所述动臂外壁上设有进水孔和出水孔,嵌套件相对两侧壁设有导水槽,嵌套件左端端面开有通孔并与导水槽连通、导水槽周围的嵌套件侧壁与动臂外壳内壁密封接触、进水孔指向导水槽形成冷却进路构成进水系统;嵌套件除导水槽周边的其余外壁与动臂外壳的内壁之间不接触、存在间隙构成冷却回路,嵌套件左端的通孔与该冷却回路连通、再与动臂外壁上设置的出水孔连通构成出水系统;进水系统与出水系统构成水冷循环系统。
7.优选的,嵌套件的左端安装有延长管,延长管的左端设置为斜口,延长管的端部距离电极帽20
‑
50mm。
8.优选的,动臂外壁上设置的进水孔和出水孔分别设置于动臂两侧的滑块上。
9.本技术方案的有益效果:本发明通过对现有技术驱动装置的改进,使原电动缸缸体分离,前缸体进行形态转化、作为冷却动臂使用,嵌套件与动臂内设置的水冷循环系统整体结构设计合理、体积小、进水系统与出水系统分离冷却效果好,大幅度缩小驱动装置的体积,极大减轻重量,使得水冷动臂轻量化,满足电阻焊整体轻量化、小型化的设计指标。
10.本发明还可以通过动臂两侧设置的滑块与焊钳外设部件滑槽配合使用,巧妙地实现动臂运动轨迹的导向功能。
附图说明
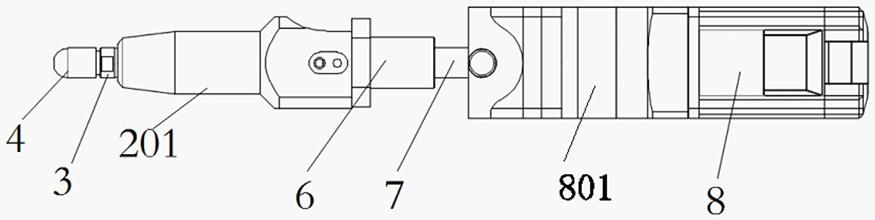
11.图1为本发明的主视结构示意图;图2为本发明的动臂的结构示意图;图3为本发明的图2中a
‑
a向剖面结构示意图;图4为本发明动臂的分解结构示意图;图示:2、动臂;3、电极杆;4、电极帽;6、螺母法兰;7、丝杆;2011、滑块;8、伺服电机;801、减速机;201、动臂外壳;202、嵌套件;2012、进水孔;2013、出水孔;2021、导水槽;203、冷却进路;204、冷却回路;9、延长管。
具体实施方式
12.下面将结合本发明的附图,对本发明的技术方案,进行清楚、完整的进行描述,所描述的实施例仅仅是本发明一部分实施例,而非全部。
13.参照附图,一种带有伺服电机8驱动装置的水冷动臂2,包括动臂2,动臂2上安装有电极杆3、电极杆3上安装有电极帽4,动臂2上固定安装有螺母法兰6,螺母法兰6内部设有贯穿设置的内螺纹并螺合有丝杆7,驱动装置通过丝杆7连接并驱动螺母法兰6,以驱动动臂2滑动;动臂2内部设有水冷循环系统构成水冷动臂2;本水冷动臂2作为焊钳的动臂使用,一般通过滑块2011滑动安装于外设部件上,该外设部件一般为焊钳的固定部分组件,动臂2由驱动装置通过丝杆7驱动;水冷循环系统设置于动臂2内。
14.优选的,驱动装置为伺服电机8,伺服电机8通过减速机801传动连接至丝杆7并驱动其转动。
15.优选的,动臂2包括动臂外壳201、嵌套件202,动臂外壳201包括其内部贯穿设置的通孔,其通孔的一端固定密封安装有电极杆3、另一端嵌入嵌套件202,嵌套件202右端外壁与动臂外壳201密封、固定连接为一体结构;动臂2的电极杆3上安装有电极帽4,动臂2的电极杆3带有贯穿孔,动臂2的电极杆3外壁与动臂外壳201密封、左端与电极帽4密封、嵌套件202的左端指向动臂2的电极杆3右端的贯穿孔内;嵌套件202右端面开设有沉孔作为丝杆7的预留空间,丝杆7伸入该沉孔内,丝杆7外壁与嵌套件202之间不接触不干扰;动臂2外壁上设有进水孔2012和出水孔2013,嵌套件202相对两侧壁设有导水槽2021,嵌套件202左端端面开有通孔并与导水槽2021连通、导水槽2021周围的嵌套件202侧壁与动臂外壳201内壁密封接触、进水孔2012指向导水槽2021形成冷却进路203构成进水系
统;嵌套件202除导水槽2021周边的其余外壁与动臂外壳201的内壁之间不接触、存在间隙构成冷却回路204,嵌套件202左端的通孔与该冷却回路204连通、再与动臂2外壁上设置的出水孔2013连通构成出水系统;进水系统与出水系统构成水冷循环系统。
16.优选的,嵌套件202的左端安装有延长管9,延长管9的左端设置为斜口,延长管9的端部距离电极帽4二十至五十毫米,以增加冷却面积和增强通水流动性,快速将电极帽4工作时产生的热量带走。
17.优选的,动臂2外壁上设置的进水孔2012和出水孔2013分别设置于动臂2两侧的滑块2011上,进水孔2012和出水孔2013用于安装水管,跟随滑块2011往复运动,不产生干扰。
18.本发明提供的一种带有伺服电机驱动装置的水冷动臂,通过伺服电机驱动减速机传动连接丝杆,驱使丝杆上连接的螺母法兰和冷却动臂进行往复运动,改变了现有技术中驱动装置使用电动缸,使电动缸缸体分离,前缸体进行形态转化、作为焊钳冷却动臂使用,直接与电阻焊焊接电源正负极进行电性连接,无需在电动缸推杆一端设置动力电极臂,同时动臂两侧设置的滑块与焊钳外设部件滑槽配合使用,实现了运动轨迹的导向功能。本发明提供的水冷动臂大大减少了体积和重量,有利于电阻焊设备的轻量化、小型化的实现。
19.本发明通过水冷动臂外壳一端设有的沉孔作为丝杆的预留空间,减少了体积。通过水冷动臂外壳和嵌套件装配构成的冷却水路循环系统,使进水系统与出水系统互不干扰,增强了电极帽的散热效果,提升焊接品质。
20.以上就是本发明较佳的实施方式,但本发明的保护范围并不局限于此,根据本发明的技术方案及构思加以替换或改变都应该覆盖在本发明的保护范围之内。
技术特征:
1.一种带有伺服电机驱动装置的水冷动臂,包括动臂,动臂上安装有电极杆、电极杆上安装有电极帽,其特征在于:所述动臂上固定安装有螺母法兰,螺母法兰内部设有贯穿设置的内螺纹并螺合有丝杆,驱动装置通过丝杆连接并驱动螺母法兰,以驱动动臂滑动;所述动臂内部设有水冷循环系统构成水冷动臂,动臂由驱动装置通过丝杆驱动;所述水冷循环系统设置于动臂内。2.根据权利要求1所述的一种带有伺服电机驱动装置的水冷动臂,其特征在于:所述驱动装置为伺服电机,伺服电机通过减速机传动连接至丝杆。3.根据权利要求1所述的一种带有伺服电机驱动装置的水冷动臂,其特征在于:所述动臂包括动臂外壳、嵌套件,动臂外壳包括其内部贯穿设置的通孔,其通孔的一端固定密封安装有电极杆、另一端嵌入嵌套件,嵌套件右端外壁与动臂外壳、固定密封连接;所述电极杆上安装有电极帽,电极杆带有贯穿孔,电极杆的外壁与动臂外壳密封、左端与电极帽密封、嵌套件的左端指向电极杆右端的贯穿孔内;所述嵌套件右端面开设有沉孔,丝杆伸入该沉孔内,丝杆外壁与嵌套件之间不接触不干扰;所述动臂外壁上设有进水孔和出水孔,嵌套件相对两侧壁设有导水槽,嵌套件左端端面开有通孔并与导水槽连通、导水槽周围的嵌套件侧壁与动臂外壳内壁密封接触、进水孔指向导水槽形成冷却进路构成进水系统;嵌套件除导水槽周边的其余外壁与动臂外壳的内壁之间不接触、存在间隙构成冷却回路,嵌套件左端的通孔与该冷却回路连通、再与动臂外壁上设置的出水孔连通构成出水系统;进水系统与出水系统构成水冷循环系统。4.根据权利要求3所述的一种带有伺服电机驱动装置的水冷动臂,其特征在于:所述嵌套件的左端安装有延长管,延长管的左端设置为斜口,延长管的端部距离电极帽20
‑
50mm。5.根据权利要求3所述的一种带有伺服电机驱动装置的水冷动臂,其特征在于:所述动臂外壁上设置的进水孔和出水孔分别设置于动臂两侧的滑块上。
技术总结
本发明公开了一种带有伺服电机驱动装置的水冷动臂,包括动臂,动臂上安装有电极杆、电极杆上安装有电极帽,动臂上固定安装有螺母法兰,螺母法兰内部设有贯穿设置的内螺纹并螺合有丝杆,驱动装置通过丝杆连接并驱动螺母法兰,以驱动动臂滑动;动臂内部设有水冷循环系统构成水冷动臂,动臂由驱动装置通过丝杆驱动;所述水冷循环系统设置于动臂内。本发明通过对现有技术驱动装置的改进,使原电动缸缸体分离,前缸体进行形态转化、作为冷却动臂使用,嵌套件与动臂内设置的水冷循环系统整体结构设计合理、体积小、冷却效果好,大幅度缩小驱动装置的体积,极大减轻重量,使得水冷动臂轻量化,满足电阻焊整体轻量化的设计指标。满足电阻焊整体轻量化的设计指标。满足电阻焊整体轻量化的设计指标。
技术研发人员:袁忠杰
受保护的技术使用者:合肥三宇电器有限责任公司
技术研发日:2021.08.06
技术公布日:2021/10/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1