一种基于复合材料多角度零件的切削机器人系统的制作方法
1.本发明是一种基于复合材料多角度零件的切削机器人系统,特别是针对复合材料零部件的加工的切削机器人系统。
背景技术:
2.随着工业水平的发展,在机械设计与制造领域,机械零部件的服役要求和设计水平不断提高,新型复合材料在航天领域应用范围愈来愈广泛,针对复合材料零部件的加工主要依靠机床切削、手工填充打磨的方式进行。但机床占用空间大,刚度高,加工一些复合材料零部件时容易产生崩坏等情况,需要手工填补打磨,自动化程度低,加工质量较差。
3.普遍的加工机器人往往采用三轴机械臂,机加时缺乏灵活度,与机床相比又缺乏精度,可开发性较差,无法匹配常见的编程系统。
4.针对以上需求,设计一种基于复合材料多角度零件的切削机器人系统,采用高刚度的六轴机械臂,具有六个方向的自由度,可以匹配绝大多数常见的编程系统,更好地发挥机械臂高重复定位精度的优势,在工作时具有良好的灵活性与精度,提高编程效率。利用机器人的良好的柔性与开发性,提高复合材料零部件加工过程的自动化程度、零部件加工质量。
技术实现要素:
5.本发明的目的是提供一种基于复合材料多角度零件的切削机器人系统,以克服现有技术中存在的问题。
6.一种基于复合材料多角度零件的切削机器人系统,包括执行装置2、低温风冷系统3、除尘系统4、刀库6和控制系统9,其特征在于,还包括六轴机械臂1、测头系统5、免标定底座7和回转工作平台8;其中,执行装置2通过法兰安装在六轴机械臂1末端关节,执行装置2与六轴机械臂1末端关节轴线成90
°
;低温风冷系统3安装在六轴机械臂1后方,通过管道接入六轴机械臂1与执行装置2;除尘系统4安装在免标定底座7下方,通过管道接入回转工作平台8;测头系统5通过法兰连接在六轴机械臂1末端关节;刀库6、六轴机械臂1、回转工作平台8共同固定在免标定底座7上;控制系统9通过plc,建立六轴机械臂1与执行装置2的通讯,并控制六轴机械臂1、执行装置2、低温风冷系统3、除尘系统4、测头系统5和回转工作平台8的动作和启停。
7.所述的低温风冷系统3包括冷干机、三联件、稳压阀和电磁阀。
8.所述的测头系统5包括超声测厚仪和连接法兰。
9.所述的除尘系统4包括工业吸尘器、吸尘管道和机械接口。
10.所述的刀库6包括刀架、刀爪、刀柄和刀具,刀具连接在刀柄末端,刀柄安装与刀爪,六组刀具、刀柄和刀爪的组合共同固定在刀架上。
11.所述的免标定底座7是高刚度材料构成,免标定底座7设有六轴机械臂1、回转工作平台8的安装孔位。
12.所述的回转工作平台8包括电动分度盘和零件工装,电动分度盘安装于免标定平台上,零件工装安装于电动分度盘上。
13.由于采用以上技术方案,本发明的有益效果是:
14.1.采用低温风冷系统,对执行装置、机械臂进行降温保护
15.2.采用除尘系统,净化工作环境,减少复合材料粉尘危害。
16.3.设计刀库,适用于不同加工工艺流程。
17.4.执行装置与机械臂末端关节轴线成90
°
,使机械臂保持较好的刚度,提升系统加工精度。
18.5.测头系统具有数据传输与反馈功能,可以实现测量质量的实时反馈。
19.6.设计一体化底座,固定工件与机械臂相对位置,实现长期使用免标定,提高加工效率。
20.7.设计plc控制系统和人机交互面板,易于工人操作,减少人工培养周期。
附图说明
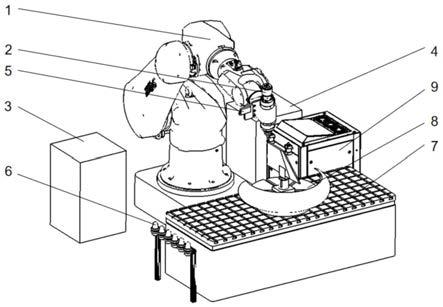
21.图1、是本发明结构示意图;
22.图2、是本发明切削过程流程图。
23.图中,1-机械臂,2-执行装置,3-低温风冷系统,4-除尘系统,5-测头系统,6-刀库,7-免标定底座,8-回转工作平台,9-控制系统。
具体实施方式
24.一种基于复合材料多角度零件的切削机器人系统,包括机械臂、执行装置、低温风冷系统、除尘系统、测头系统、刀库、免标定底座、回转工作平台、控制系统、组成。其特征在于:执行装置通过法兰安装在机械臂末端关节,执行装置与机械臂末端关节轴线成90
°
。低温风冷系统安装在机械臂后方,通过管道接入机械臂与执行装置。除尘系统安装在底座下方,通过管道接入回转工作平台。测头系统通过法兰连接在机械臂末端关节。刀库、机械臂、回转工作平台共同固定在免标定底座上。控制系统通过plc,建立机械臂与执行装置的通讯,联合控制机械臂、执行装置、低温风冷系统、除尘系统、测头系统、回转工作平台的动作和启停。
25.进一步地,所述的一种基于复合材料多角度零件的切削机器人系统,其特征在于低温风冷系统由冷干机、三联件、稳压阀、电磁阀等组成。
26.进一步地,所述的一种基于复合材料多角度零件的切削机器人系统,其特征在于测头系统由超声测厚仪、连接法兰等组成。
27.进一步地,所述的一种基于复合材料多角度零件的切削机器人系统,其特征在于除尘系统由工业吸尘器、吸尘管道、机械接口等组成。
28.进一步地,所述的一种基于复合材料多角度零件的切削机器人系统,其特征在于刀库由刀架、刀爪、刀柄、刀具等组成,刀具连接在刀柄末端,刀柄安装与刀爪,六组刀具、刀柄、刀爪组合共同固定在刀架上。
29.进一步地,所述的一种基于复合材料多角度零件的切削机器人系统,其特征在于免标定底座具有高刚度,具有机械臂、回转工作平台等安装孔位。
30.进一步地,所述的一种基于复合材料多角度零件的切削机器人系统,其特征在于回转工作平台由电动分度盘、零件工装等组成,电动分度盘安装于免标定平台上,零件工装安装于电动分度盘。
31.下面结合附图和实施例对本发明进一步说明,本发明包括但不仅限于下述实施例。
32.如图所示,一种基于复合材料多角度零件的切削机器人系统,包括机械臂1、执行装置2、低温风冷系统3、除尘系统4、测头系统5、刀库6、免标定底座7、回转工作平台8、控制系统9组成。
33.执行装置2通过法兰安装在机械臂1末端关节,执行装置2与机械臂1末端关节轴线成90
°
。低温风冷系统3安装在机械臂1后方,通过管道接入机械臂1与执行装置2。除尘系统4安装在底座7下方,通过管道接入回转工作平台8。测头系统5通过法兰连接在机械臂1末端关节。刀库6、机械臂1、回转工作平台8共同固定在免标定底座7上。控制系统9通过plc,建立机械臂1与执行装置2的通讯,联合控制机械臂1、执行装置2、低温风冷系统3、除尘系统4、测头系统5、回转工作平台8的动作和启停。
34.综上所述,本发明是一种基于复合材料多角度零件的切削机器人系统,包括六轴机械臂、执行装置、低温风冷系统、除尘系统、测头系统、刀库、免标定底座、回转工作平台、控制系统组成。其特征在于:执行装置通过法兰安装在六轴机械臂末端关节,执行装置与六轴机械臂末端关节轴线成90
°
。低温风冷系统安装在六轴机械臂后方,通过管道接入六轴机械臂与执行装置。除尘系统安装在底座下方,通过管道接入回转工作平台。测头系统通过法兰连接在六轴机械臂末端关节。刀库、六轴机械臂、回转工作平台共同固定在免标定底座上。控制系统通过plc,建立六轴机械臂与执行装置的通讯,联合控制六轴机械臂、执行装置、低温风冷系统、除尘系统、测头系统、回转工作平台的动作和启停。本发明通过本基于复合材料多角度零件的切削机器人系统,可以实现对复合材料进行高效、高质量、高自动化的切削。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1