半挂车厢板生产线的制作方法
1.本发明涉及半挂车技术,特别是提供一种半挂车厢板生产线。
背景技术:
2.目前半挂车厢板生产,见图1,物料小车1将构成厢板工件所需要的竖边件,芯板,横边件,方管等零件送到厢板组装工位2,人工组装后送到厢板焊接工位3,人工进行点焊和焊接,然后送到点焊合页门刀工位4,人工进行点焊定位合页和门刀等零件,再到焊接合页门刀工位5,焊接好合页门刀,然后进行清理、码垛,全部采用人工组装、点焊、焊接、修补等工序进行。这样,造成:1.组装精度差,焊接质量不稳定;2.人工劳动强度大,弧光、烟尘危害大;3.生产效率低;4.不符合国家倡导的智能制造、绿色工厂要求。
技术实现要素:
3.针对现有半挂车厢板生产存在的上述缺陷,本发明提供一种自动压焊、自动焊接、实现厢板互换的标准化生产的半挂车厢板生产线,即机器人操作的智能自动化生产线,是传统产业改造升级换代的智能制造。
4.本发明的技术方案是这样实现的。
5.本发明的半挂车厢板生产线产出的厢板,其组成包括竖边件、横边件和芯板,竖边件的中部鸭嘴夹持芯板,竖边件的两端槽口连接横边件,横边件与芯板固定连接。其中,竖边件中部是鸭嘴结构,两端为槽口。
6.一种半挂车厢板生产线,包括传输设备,设置于传输设备上的组装工装,位于传输设备旁边的点焊设备,位于传输设备旁边在点焊设备后端的专用焊接机以及独立设置的控制系统;采用组装工装组装包含芯板、竖边件、横边件在内的零件;采用点焊设备点焊定位;采用专用焊接机焊接芯板;采用控制系统对传输设备上的每个工位节点位置和节拍进行控制,工件在传输设备上流转,以此完成生产线作业。在组装工位,将芯板、竖边件,横边件采用组装工装组装夹紧,保证形状尺寸不变化;采用点焊设备点焊定位,固定竖边件和芯板;工件被传输到下一焊接工位,专用焊接机焊接芯板;然后输送到补焊工位进行补焊;补焊完成后清理,输送到存放工位进行码垛;采用控制系统对传输设备上的每个工位节点位置和节拍进行控制,使得流水线生产顺畅,节拍合理,节点位置精准;工件在传输设备上流转,完成厢板整个生产线的作业。
7.进一步的,组装工装是随行工装。
8.进一步的,点焊设备是c型钳伺服焊机器人。
9.进一步的,还包括补焊工序,设置在专用焊接机焊接芯板节点之后,补焊工序采用补焊工装装夹工件。
10.进一步的,补焊工装是抓取机器人。
11.进一步的,半挂车厢板生产线是单行生产线体,由此单行生产线体的两条平行排列合并为一个生产线,共用一个点焊设备。
12.进一步的,补焊工装是抓取机器人的半挂车厢板生产线是单行生产线体,由此单行生产线体的两条平行排列合并为一个生产线,共用一个抓取机器人。
13.进一步的,补焊工装是抓取机器人的半挂车厢板生产线的两条单行生产线体合并为一个生产线的具体资源设备有,组装工装2台, c型钳伺服焊机器人1台,专用焊接机设备2台,抓取机器人1台,焊接机器人2台。
14.进一步的,半挂车厢板生产线还包括清理工序,设置在补焊工序节点之后,清理工序由机器人操作。
15.进一步的,半挂车厢板生产线还包括码垛工序,设置在清理工序节点之后,码垛工序由机器人操作。
16.一种半挂车厢板生产线的作业步骤,在组装工位,将芯板、竖边件,横边件采用组装工装组装夹紧;采用点焊设备压焊钳点焊定位,压焊竖边件的鸭嘴部位,固定竖边件和芯板;工件被传输到下一焊接工位,专用焊接机焊接芯板;然后,工件被传输到下一补焊工位,使用补焊工装对工件进行装夹,进行补焊;最后工件被传输到码垛工位,进行码垛。一种厢板的生产线,在组装工位,将芯板、竖边件,横边件采用组装工装组装夹紧,夹紧保证形状尺寸不变化;采用点焊设备压焊钳点焊定位,压焊竖边件的鸭嘴部位,固定竖边件和芯板;工件被传输到下一焊接工位,专用焊接机焊接芯板;然后,工件被传输到下一补焊工位,使用补焊工装对工件进行装夹,进行补焊,进行人工补焊或者是采用焊接机器人补焊,并焊接合页与门刀;清理工件;最后工件被传输到码垛工位,进行码垛工件。组装工位的用料全部使用agv物料小车智能配送,agv物料小车受节拍控制。以此完成“人工组装—点焊定位—专用焊接机焊接—补焊—下线”的半挂车厢板生产线的作业。
17.进一步的,半挂车厢板生产线还包括,在机器人焊接设备,以及生产线工位节点位置,设置有传感器,传感器信息传送到物联网,物联网与控制系统、云平台互联。
18.本发明的有益效果在于:
19.本发明提供的自动压焊、自动焊接、实现厢板互换的标准化生产的机器人操作的智能自动化生产线,属于传统产业改造换代的智能制造,优点是,实现生产自动化,标准化组织生产,生产的工件完全达到互换性要求,并且工件精度高,自动化生产,减少员工劳动强度,生产效率提升100%,节省人力70%,降低成本,改善作业环境。
附图说明
20.本发明的附图及其说明与示意性实施例一起用于解释本发明,并不构成对本发明的不当限定。
21.图1示出了与本发明最接近的现有半挂车厢板生产线的示意图;
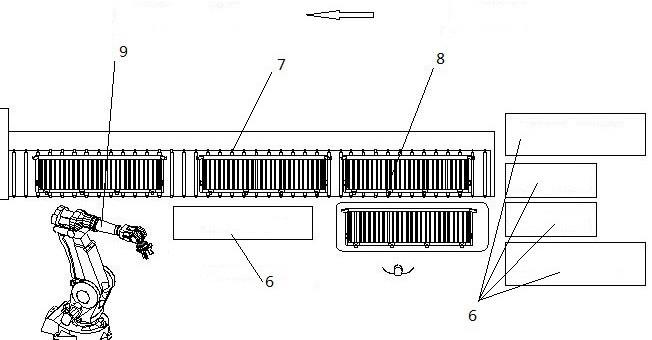
22.图2、3依序示出了根据本发明的半挂车厢板生产线的示意图;
23.图4、5依序示出了根据本发明的另一种半挂车厢板生产线的示意图;
24.图6示出了根据本发明的半挂车厢板生产线单行生产线体补焊工序的示意图;
25.图7示出了根据本发明的半挂车厢板生产线单行生产线体的两条平行排列合并为一个生产线补焊工序的示意图;
26.图8示出了根据本发明的半挂车厢板生产线产出的厢板工件示意图;
27.图9示出了根据本发明的半挂车厢板工件的竖边件示意图。
28.其中,1.物料小车,2.组装工位,3.焊接工位,4.点焊合页门刀工位,5. 焊接合页门刀工位,6. agv物料小车,7.传输设备,8.组装工装,9.c型钳伺服焊机器人,10.专用焊接机,11.补焊工位,12.存放工位,13.竖边件,14芯板,15.横边件,16.槽口,17.鸭嘴,100.工件,22抓取机器人,23.焊接机器人。
具体实施方式
29.下面通过附图中示出的不同说明性实施例更加详细地解释本发明的进一步的细节及效果。通过参考附图描述实施例是示例性的,旨在解释本发明,而不能理解为对本发明的限制。
30.本技术所述的前端、后端,前部、尾部都是相对于传输方向(工件走向)确定的,组装工件是起点,是前端,焊接工件完成是终点,是后端,传输设备从传输开始是前部,至传输结束是尾部。
31.本发明的半挂车厢板生产线产出的厢板组成,见图8,包括竖边件13、横边件15和芯板14,竖边件13的中部鸭嘴17夹持芯板14,竖边件13的两端槽口16连接横边件15,横边件15与芯板14固定连接。其中,竖边件形状见图9,中部是鸭嘴17的结构,两端为槽口16的结构。
32.一种半挂车厢板生产线的实施例,参考图2、3顺序,包括传输设备,设置于传输设备上的组装工装,位于传输设备旁边的点焊设备,位于传输设备旁边在点焊设备后端的专用焊接机以及独立设置的控制系统;采用组装工装组装包含芯板、竖边件、横边件在内的零件;采用点焊设备点焊定位;采用专用焊接机焊接芯板;采用控制系统对传输设备上的每个工位节点位置和节拍进行控制,工件在传输设备上流转,以此完成生产线作业。agv物料小车6将构成厢板工件所需要的芯板14、竖边件13、横边件15、方管等零件送到传输设备7上的厢板组装工位,使用组装工装8组装包含芯板14、竖边件13、横边件15在内的零件,见图8,芯板14装入竖边件13的中部鸭嘴17中,横边件15的端头装入竖边件13的两端槽口16,芯板14套在两个横边件15之间;竖边件13设计成中部是鸭嘴17,两端为槽口16的形状,一是便于生产,二是有效焊接,减少焊接量即能将芯板14与横边件15固定连接,减少变形,是一种防涨箱结构;c型钳伺服焊机器人9对各零件进行点焊定位,主要是芯板14和竖边件13的压焊定位,然后工件100及随行工装被输送到芯板焊接工位,专用焊接机10将芯板14与横边件15焊接牢固,然后工件100被输送到厢板补焊工位11进行补焊,最后到厢板存放工位12进行码垛。如此,在组装工位,将芯板、竖边件,横边件采用组装工装组装夹紧,保证形状尺寸不变化;采用点焊设备点焊定位,固定竖边件和芯板;工件被传输到下一焊接工位,专用焊接机焊接芯板与横边件;然后输送到补焊工位进行补焊;补焊完成后清理,输送到存放工位进行码垛;采用控制系统对传输设备上的每个工位节点位置和节拍进行控制,使得流水线生产顺畅,节拍合理,节点位置精准;工件在传输设备上流转,组装工位的用料全部使用agv物料小车智能配送,agv物料小车受节拍控制,完成厢板整个生产线的作业。
33.可选的,本发明的一些实施例中,组装工装是随行工装。随行工装,即可以与工件一起移动,能从工件上移出;不象固定工装那样固定在产线上的某个位置不能移动;随行工装在产线上的点焊定位节点位置与工件在一起,保证工件点焊后尺寸不变,点焊定位节点任务完成后,随行工装可以从工件上移出,也可以与工件一起进入下一个工序,完成工序后
从工件上移出;随行工装从工件上移出后,工件在原有位置进行下一工序,如焊接,或者被传输到下一工位进行下一工序,如焊接;而固定工装就是在产线上的点焊定位节点位置固定不动,点焊定位节点任务完成后,工件从固定工装上卸除下来,然后工件被传输到下一工位进行下一工序,如焊接。
34.可选的,参考图2,本发明的一些实施例中,点焊设备是c型钳伺服焊机器人。带有c型钳的机器人叫c型钳伺服焊机器人9,c型钳特有的结构“c”,如钳子,与竖边件13的鸭嘴17部位相适应,对竖边件13的鸭嘴17部位进行压焊,将芯板14夹紧于竖边件13的鸭嘴部位。在组装时,竖边件13的鸭嘴17部位与芯板14已经配合定位,如此,使用c型钳,就可以用少量的焊接量达到将竖边件13与芯板14固定连接的目的。
35.可选的,参考图3,本发明的一些实施例中,厢板生产线还包括补焊工序,设置在专用焊接机焊接芯板节点之后,补焊工序采用补焊工装装夹工件。当工件在专用焊接机焊接完芯板后被传输到补焊工位11,使用补焊工装对工件进行装夹,也可以采用人工夹持工件,进行人工补焊;补焊工装是一般的夹具,能够将工件夹住移离传输设备,放置于传输设备的两侧,这样不影响传输设备的流转;使用一般的夹具夹持工件时,可以忽略冷却工序即进行补焊。补焊工序,可以一并焊接合页与门刀;补焊后清理,然后码垛工件。如此,完成“组装—点焊定位—专用焊接机焊接—人工补焊—下线”的全生产线作业过程。
36.当然,补焊工序的补焊操作可以是人工,也可以是机器人,补焊工位可以设置在生产线上,也可以设置在生产线下。
37.可选的,参考图6,本发明的一些实施例中,补焊工序采用的补焊工装是抓取机器人。补焊工装采用抓取机器人22,能够抓取工件移离传输设备7,可以旋转一定角度到一定位置;抓取机器人将工件100在空中翻转90度,使工件处于竖直状态,便于人工或焊接机器人在竖直的空间平面内对工件进行补焊;此情形的抓取机器人22可以立在传输设备7的侧面,也可以立在传输设备7的尾部。可选的,焊接机器人23与抓取机器人22分别位于传输设备7的两侧,相向而立,抓取机器人22抓取工件移离传输设备,将工件高举在传输设备7的上空,这样,不影响传输设备的流转,抓取机器人22将工件在空中翻转90度,使工件处于竖直状态,对面的焊接机器人23在竖直的空间平面内对工件进行补焊;焊接机器人补焊完成后,抓取机器人将工件放于传输设备上,或者放于其他预存的地方,以减少二次搬运。由于工件在传输设备线上是呈水平状态放置,为了不用人工搬运、翻转,则采用抓取机器人抓取工件进行90度翻转,成竖直形式,工件立于传输设备上空,这样便于焊接机器人在竖直的空间平面内对工件进行补焊。同时可以在工件上焊接附件,如合页、门刀、插销、锁杆等,此时,附件有另外的设备供给,或者是抓取机器人在抓取工件之前,附件先点焊在工件上。如此,完成“组装—点焊定位—专用焊接机焊接—机器人补焊—下线”的全生产线作业过程。
38.可选的,参考图4、5,本发明的一些实施例中,半挂车厢板生产线是单行生产线体,由此单行生产线体的两条平行排列合并为一个生产线,共用一个点焊设备。采用点焊设备点焊定位、再专用焊接机焊接—补焊—下线的厢板生产线,即图2、3的生产线认为是单行生产线体,由此两条单行生产线体平行排列合并为一个生产线,共用一个点焊设备即c型钳伺服焊机器人9。按图4、5顺序,两条单行生产线体合并为一个生产线,两条单行生产线体同时进行作业,共用一个点焊设备(c型钳伺服焊机器人),如此设置的目的就是适应智能生产线的节拍。配合的具体资源设备是,组装工装2台, c型钳伺服焊机器人1台,专用焊接机设备2
台,人工补焊工装4台,两班生产人员14人,生产节拍:3.5分钟/页。两条单行生产线体合并为一个生产线,共用一个点焊设备,协调作业,节省成本。
39.可选的,参考图7,本发明的一些实施例中,补焊工装是抓取机器人的半挂车厢板生产线是单行生产线体,由此单行生产线体的两条平行排列合并为一个生产线,共用一个抓取机器人。补焊工装采用抓取机器人22,与焊接机器人23分别位于传输设备7的两侧,相向而立,抓取机器人22抓取工件100移离传输设备7,将工件高举在传输设备7的上空,让对面的焊接机器人23在竖直的空间平面内对工件进行补焊的生产线,即含有图6的生产线认为是单行生产线体,由此两条单行生产线体平行排列合并为一个生产线,共用一个抓取机器人22。两条单行生产线体合并为一个生产线,两条单行生产线体同时进行作业,共用一个抓取机器人,如此设置的目的就是适应智能生产线的节拍。设备的匹配方案如下,组装工装2台, c型钳伺服焊机器人1台,专用焊接机设备2台,抓取机器人1台,焊接机器人2台,两班生产人员14人,生产节拍:3.5分钟/页。
40.可选的,本发明的一些实施例中,半挂车厢板生产线还包括清理工序,设置在补焊工序节点之后,清理工序由机器人操作。清理工序包括除焊渣、飞溅物等;设置在补焊工序节点之后。厢板生产线的除焊渣、飞溅物、灰尘等环境污染物是由机器人操作,机器代替人工进行打磨,清灰;生产线上的清理焊渣、飞溅物是在一个专用的房间内进行。
41.可选的,本发明的一些实施例中,半挂车厢板生产线还包括码垛工序,设置在清理工序节点之后,码垛工序由机器人操作。在清理工序节点之后,厢板生产线的码垛工件工序,是由机器人操作,机器代替人工进行搬运、堆垛。
42.一种半挂车厢板生产线的作业步骤实施例,按图2、3顺序,在组装工位,将芯板、竖边件,横边件采用组装工装组装夹紧;采用点焊设备压焊钳点焊定位,压焊竖边件的鸭嘴部位,固定竖边件和芯板;工件被传输到下一焊接工位,专用焊接机焊接芯板;然后,工件被传输到下一补焊工位,使用补焊工装对工件进行装夹,进行人工补焊;最后工件被传输到码垛工位,码垛工件。如此,一种厢板的生产线,在组装工位,将芯板、竖边件,横边件采用组装工装组装夹紧,夹紧保证形状尺寸不变化;采用c型钳伺服焊机器人压焊钳点焊定位,压焊竖边件的鸭嘴部位,固定竖边件和芯板;工件被传输到下一焊接工位,专用焊接机焊接芯板;然后,工件被传输到下一补焊工位,使用补焊工装对工件进行装夹,进行人工补焊或者是采用焊接机器人补焊,并焊接合页与门刀;清理工件;最后工件被传输到码垛工位,进行码垛工件。组装工位的用料全部使用agv物料小车智能配送,agv物料小车受节拍控制。以此完成“人工组装—点焊定位—专用焊接机焊接—补焊—下线”的半挂车厢板生产线的作业。
43.可选的,本发明的一些实施例中,厢板生产线,在专用焊接机、焊接机器人机器人焊接设备,以及生产线工位节点位置,设置有传感器,传感器将设备运行数据以及工位工艺工况(位移、时长、力、振动等)数据传递到控制系统。如此,便于信息进行统计分析,为改进质量,改善工艺参数带来依据。
44.可选的,本发明的一些实施例中,厢板生产线设置的传感器信息传送到物联网,物联网与控制系统、云平台互联,实现运程监控。
45.以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,描述的具体特征、结构、材料或
者特点可以在任何的一个或多个实施例或者示例中以合适方式结合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围,都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1