一种适用于康复轮椅辅助轮安装的智能装置的制作方法
1.本实用新型涉及轮椅制造领域,尤其涉及一种适用于康复轮椅辅助轮安装的智能装置。
背景技术:
2.康复器材主要是帮助患者开展被动运动和日常活动,促进康复的设备。多数由不锈钢、铁、塑料、木材为材料,通过机械加工、焊接、注塑等生产工艺做成需要的零件,最后由零件权组装成康复器械。其中的康复轮椅可以满足行走、站立等活动。
3.目前,康复轮椅为了增加安全性和便利性,通常会设置有辅助轮。
4.传统工艺中,辅助轮和配套的连接套柱的安装采用手动安装。其中由于配件多导致占用大量空间,堆放混乱,存取难度大,补料困难;此外,配件多为箱装,取用费时费力。
技术实现要素:
5.本实用新型提出了一种适用于康复轮椅辅助轮安装的智能装置,解决了传统辅助轮安装过程中存在配件占用空间大、存取不便、补料混乱和安装效率低等问题。
6.为了实现上述目的,本实用新型采用了如下技术方案:
7.一种适用于康复轮椅辅助轮安装的智能装置,包括主体框架、辅助轮供料部分、连接套柱供料部分、架体固定部分和智能控制部分。
8.所述主体框架包括底座、基座和固定架。
9.所述底座包括长方体中空容器一。
10.所述长方体中空容器一上底板上等距设置若干个长方形通孔一、圆形通孔一和长方形开口通槽一。
11.所述长方体中空容器一前侧板上等距设置若干个长方形开口通槽二,所述长方形开口通槽二的开口端与长方形开口通槽一开口端重合。
12.所述长方形开口通槽一内设置一长方形容器一,长方形容器一前侧板设置一个长方形开口通槽三。
13.所述长方形开口通槽三上合页连接一坡道板。
14.所述基座包括长方体中空容器二;长方体中空容器二设置于长方体中空容器一上。
15.所述固定架设置于长方体中空容器一上。
16.所述固定架包括支柱、连接横柱和连接短柱。
17.所述支柱设置于长方体中空容器一上。
18.所述连接横柱和连接短柱设置于支柱上。
19.所述辅助轮供料部分包括送料机构、调节机构和储料机构。
20.所述送料机构包括振动盘送料装置和送料轨。
21.所述振动盘送料装置设置于基座上;振动盘送料装置的出料口设置于送料轨的进
口端上。
22.所述送料轨设置于固定架上。
23.所述送料轨包括“u”形导轨、柱形限位条和限位板。
24.所述“u”形导轨设置于固定架上,且“u”形导轨位于圆形通孔一上方;所述“u”形导轨下底板上等距设置若干个长方形通孔三。
25.所述柱形限位条设置若干个,且通过连接杆设置于“u”形导轨内;柱形限位条两端设置“j”形连接头。
26.所述限位板设置于“u”形导轨的右端,限位板上设置一个圆形凹槽一。
27.所述调节机构包括调节板、“c”形限位条一和伺服电机一。
28.所述调节板销轴连接于“u”形导轨的下底面上。
29.所述伺服电机一的转轴通过一卷轴与调节板之间绳链连接。
30.所述“c”形限位条一设置于调节板上,且“c”形限位条一与柱形限位条相适配。
31.所述储料机构包括存储箱、“c”形限位条二、“c”形限位条三、限位条四、步进电机一和“十”字轮叶闸。
32.所述存储箱包括长方形容器二;长方形容器二设置于“u”形导轨下底面上;长方形容器二前侧板设置一长方形通孔二。
33.所述“c”形限位条二、“c”形限位条三和限位条四通过“l”形连接条设置于存储箱后侧板上。
34.所述“c”形限位条二、“c”形限位条三和限位条四构成一“c”形滑轨;“c”形限位条三位于“c”形限位条二右侧;限位条四位于“c”形限位条二下侧。
35.所述步进电机一通过安装架设置于长方形容器二内,步进电机一转轴设置于“十”字轮叶闸上。
36.所述“十”字轮叶闸销轴连接于限位条四上。
37.所述长方形容器二内弹簧连接一“n”形活动卡块,且“n”形活动卡块位于限位条四左侧。
38.所述连接套柱供料部分包括供料箱、推杆电机一、丝杆电机和刮条。
39.所述供料箱包括长方形容器三和长方形容器四。
40.所述长方形容器三下底板上设置一圆形通孔二,圆形通孔二和圆形通孔一相适配。
41.所述长方形容器三左侧板和右侧板上均设置“u”形开口通槽五。
42.所述长方形容器三前侧板设置“u”形开口通槽六。
43.所述长方形容器四下底板上设置一个长方形通孔三;长方形容器四通过长方形通孔三设置于长方形容器三上。
44.所述长方形容器三上的“u”形开口通槽六和长方形容器四下底板之间通过一个斜板固连。
45.所述推杆电机一设置于长方体中空容器一内,推杆电机一的活动端依次穿过圆形通孔一和圆形通孔二后设置于长方形托板一上;长方形容器三下底板上设置两个限位凸起,限位凸起位于长方形托板一后侧。
46.所述丝杆电机设置于长方形容器四内,丝杆电机的动子滑动连接于滑竿上,所述
滑竿设置于长方形容器四内,且与丝杆电机平行;丝杆电机的动子通过一条形连接杆设置于一刮条上。
47.所述刮条滑动连接于长方形容器三内。
48.所述架体固定部分包括推杆电机二、长方形托板二和限位架。
49.所述推杆电机二设置于长方体中空容器一内,推杆电机二的活动端穿过长方形通孔一后设置于长方形托板二的下底面上。
50.所述长方形托板二上底面设置两个长方形凹槽一和两个圆形凹槽二;长方形凹槽一分别设置一压力传感器模块;两个长方形凹槽一和两个圆形凹槽二内分别滑动连接一长方形滑块和圆形滑块。
51.所述限位架设置四个,且平行设置于长方形托板二上底面上,限位架位于长方形凹槽一的两侧;限位架上等距设置若干个“u”形凹槽。
52.所述智能控制部分包括辅助轮检测机构、连接套柱检测机构和控制预警机构。
53.所述辅助轮检测机构包括距离传感器模块一、红外避障传感器模块一和微处理器。
54.所述距离传感器模块一设置于圆形凹槽一内。
55.所述红外避障传感器模块一设置两个,均位于长方形容器一内;两个红外避障传感器模块一分别位于“c”形限位条二后方和“n”形活动卡块后方。
56.所述微处理器设置于长方体中空容器一内。
57.所述连接套柱检测机构包括距离传感器模块二。
58.所述距离传感器模块二设置于长方形容器四右侧板上。
59.所述控制预警机构包括启动按钮、暂停按钮、蜂鸣器和可变色发光二极管。
60.所述启动按钮、暂停按钮、蜂鸣器和可变色发光二极管均设置于长方形容器三前侧板上。
61.所述振动盘送料装置、伺服电机一、步进电机一、推杆电机一、丝杆电机、推杆电机二、距离传感器模块二、启动按钮、暂停按钮、蜂鸣器、可变色发光二极管、距离传感器模块一、红外避障传感器模块一和微处理器之间电性连接。
62.进一步,在送料轨上增设止回机构。
63.进一步,在长方形滑块和圆形滑块上增设圆形凹槽三,圆形凹槽三内设置红外避障传感器模块三,红外避障传感器模块三与微处理器电性连接。
64.相对于现有技术的有益效果:
65.本实用新型中,通过主体框架、辅助轮供料部分、连接套柱供料部分、架体固定部分和智能控制部分的一体化设置,可实现辅助轮安装时的配件智能补给,节约大量空间;不同配件位置固定,缺料自动提醒,补料效率得到显著提高;配件区和组装区域呈扇形分布设计,符合操作习惯,显著提高安装效率。
附图说明
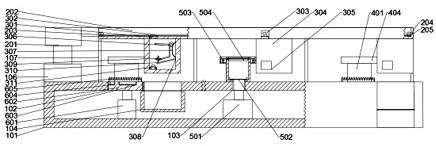
66.图1为本实用新型正视局部剖面结构示意图;
67.图2为本实用新型俯视结构示意图。
68.图中:101. 长方体中空容器一、102. 长方形通孔一、103. 圆形通孔一、104. 长
方形容器一、105. 坡道板、106. 长方体中空容器二、107. 固定架、201. 振动盘送料装置、202.
ꢀ“
u”形导轨、203. 柱形限位条、204. 限位板、205. 圆形凹槽一、301. 调节板、302.
ꢀ“
c”形限位条一、303. 伺服电机一、304. 长方形容器二、305. 长方形通孔二、306.
ꢀ“
c”形限位条二、307.
ꢀ“
c”形限位条三、308. 限位条四、309. 步进电机一、310.
ꢀ“
十”字轮叶闸、311.
ꢀ“
n”形卡、401. 长方形容器三、402.
ꢀ“
u”形开口通槽五、403.
ꢀ“
u”形开口通槽六、404. 长方形容器四、405. 斜板、501. 推杆电机一、502. 长方形托板一、503. 丝杆电机、504. 刮条、601. 推杆电机二、602. 长方形托板二、603. 长方形凹槽一、604. 圆形凹槽二、605. 限位架。
具体实施方式
69.实施例1,参照附图1-2,一种适用于康复轮椅辅助轮安装的智能装置,包括主体框架、辅助轮供料部分、连接套柱供料部分、架体固定部分和智能控制部分。
70.所述主体框架包括底座、基座和固定架107。
71.所述底座包括长方体中空容器一101。
72.所述长方体中空容器一101上底板上等距设置若干个长方形通孔一102、圆形通孔一103和长方形开口通槽一。
73.所述长方体中空容器一101前侧板上等距设置若干个长方形开口通槽二,所述长方形开口通槽二的开口端与长方形开口通槽一开口端重合。
74.所述长方形开口通槽一内设置一长方形容器一104,长方形容器一104前侧板设置一个长方形开口通槽三。
75.所述长方形开口通槽三上合页连接一坡道板105。
76.所述基座包括长方体中空容器二106;长方体中空容器二106设置于长方体中空容器一101上。
77.所述固定架107设置于长方体中空容器一101上。
78.所述固定架107包括支柱、连接横柱和连接短柱。
79.所述支柱设置于长方体中空容器一101上。
80.所述连接横柱和连接短柱设置于支柱上。
81.所述辅助轮供料部分包括送料机构、调节机构和储料机构。
82.所述送料机构包括振动盘送料装置201和送料轨。
83.所述振动盘送料装置201设置于基座上;振动盘送料装置201的出料口设置于送料轨的进口端上。
84.所述送料轨设置于固定架107上。
85.所述送料轨包括“u”形导轨202、柱形限位条203和限位板204。
86.所述“u”形导轨202设置于固定架107上,且“u”形导轨202位于圆形通孔一103上方;所述“u”形导轨202下底板上等距设置若干个长方形通孔三。
87.所述柱形限位条203设置若干个,且通过连接杆设置于“u”形导轨202内;柱形限位条203两端设置“j”形连接头。
88.所述限位板204设置于“u”形导轨202的右端,限位板204上设置一个圆形凹槽一205。
89.所述调节机构包括调节板301、“c”形限位条一302和伺服电机一303。
90.所述调节板301销轴连接于“u”形导轨202的下底面上。
91.所述伺服电机一303的转轴通过一卷轴与调节板301之间绳链连接。
92.所述“c”形限位条一302设置于调节板301上,且“c”形限位条一302与柱形限位条203相适配。
93.所述储料机构包括存储箱、“c”形限位条二306、“c”形限位条三307、限位条四308、步进电机一309和“十”字轮叶闸310。
94.所述存储箱包括长方形容器二304;长方形容器二304设置于“u”形导轨202下底面上;长方形容器二304前侧板设置一长方形通孔二305。
95.所述“c”形限位条二306、“c”形限位条三307和限位条四308通过“l”形连接条设置于存储箱后侧板上。
96.所述“c”形限位条二306、“c”形限位条三307和限位条四308构成一“c”形滑轨;“c”形限位条三307位于“c”形限位条二306右侧;限位条四308位于“c”形限位条二306下侧。
97.所述步进电机一309通过安装架设置于长方形容器二304内,步进电机一309转轴设置于“十”字轮叶闸310上。
98.所述“十”字轮叶闸310销轴连接于限位条四308上。
99.所述长方形容器二304内弹簧连接一“n”形活动卡块311,且“n”形活动卡块311位于限位条四308左侧。
100.所述连接套柱供料部分包括供料箱、推杆电机一501、丝杆电机503和刮条504。
101.所述供料箱包括长方形容器三401和长方形容器四404。
102.所述长方形容器三401下底板上设置一圆形通孔二,圆形通孔二和圆形通孔一103相适配。
103.所述长方形容器三401左侧板和右侧板上均设置“u”形开口通槽五402。
104.所述长方形容器三401前侧板设置“u”形开口通槽六403。
105.所述长方形容器四404下底板上设置一个长方形通孔三;长方形容器四404通过长方形通孔三设置于长方形容器三401上。
106.所述长方形容器三401上“u”形开口通槽六403和长方形容器四404下底板之间通过一个斜板405固连。
107.所述推杆电机一501设置于长方体中空容器一101内,推杆电机一501的活动端依次穿过圆形通孔一103和圆形通孔二后设置于长方形托板一502上;长方形容器三401下底板上设置两个限位凸起,限位凸起位于长方形托板一502后侧。
108.所述丝杆电机503设置于长方形容器四404内,丝杆电机503的动子滑动连接于滑竿上,所述滑竿设置于长方形容器四404内,且与丝杆电机503平行;丝杆电机503的动子通过一条形连接杆设置于一刮条504上。
109.所述刮条504滑动连接于长方形容器三401内。
110.所述架体固定部分包括推杆电机二601、长方形托板二602和限位架605。
111.所述推杆电机二601设置于长方体中空容器一101内,推杆电机二601的活动端穿过长方形通孔一102后设置于长方形托板二602的下底面上。
112.所述长方形托板二602上底面设置两个长方形凹槽一603和两个圆形凹槽二604;
长方形凹槽一603分别设置一压力传感器模块;两个长方形凹槽一603和两个圆形凹槽二604内分别滑动连接一长方形滑块和圆形滑块。
113.所述限位架605设置四个,且平行设置于长方形托板二602上底面上,限位架605位于长方形凹槽一603的两侧;限位架605上等距设置若干个“u”形凹槽。
114.所述智能控制部分包括辅助轮检测机构、连接套柱检测机构和控制预警机构。
115.所述辅助轮检测机构包括距离传感器模块一、红外避障传感器模块一和微处理器。
116.所述距离传感器模块一设置于圆形凹槽一205内。
117.所述红外避障传感器模块一设置两个,均位于长方形容器一104内;两个红外避障传感器模块一分别位于“c”形限位条二306后方和“n”形活动卡块311后方。
118.所述微处理器设置于长方体中空容器一101内。
119.所述连接套柱检测机构包括距离传感器模块二。
120.所述距离传感器模块二设置于长方形容器四404右侧板上。
121.所述控制预警机构包括启动按钮、暂停按钮、蜂鸣器和可变色发光二极管。
122.所述启动按钮、暂停按钮、蜂鸣器和可变色发光二极管均设置于长方形容器三401前侧板上。
123.所述振动盘送料装置201、伺服电机一303、步进电机一309、推杆电机一501、丝杆电机503、推杆电机二601、距离传感器模块二、启动按钮、暂停按钮、蜂鸣器、可变色发光二极管、距离传感器模块一、红外避障传感器模块一和微处理器之间电性连接。
124.工作原理及使用方法:
125.第一步,预设置:
126.对设备进行通电,并进行试运行与电子元件及程序的调试。
127.向振动盘送料装置201内放置适量的辅助轮。
128.将箱装连接套柱放置入长方形容器三401内的长方形托板一502上,箱装连接套柱的箱体后侧板紧靠限位凸起前侧。
129.所述箱装连接套柱的箱子包括长方形容器五,长方形容器五下底板上设置于长方形通孔五,一垫板滑动连接于长方形容器五内,连接套柱码放于垫板上。限位凸起起到快速确定垫板位置的作用。
130.第二步,备料:
131.将待安装的机体(轮椅或轮椅配件)放置到两个平行的限位架605之间,机体下端位于长方形滑块或圆形滑块上。
132.此时压力传感器模块接收到信号,并输出信号给微处理器;微处理器输出信号给振动盘送料装置201和推杆电机二601,振动盘送料装置201开始启动,推杆电机二601带动长方形托盘二602上移至合适高度。
133.操作人员按压启动按钮,微处理器输出信号给伺服电机一303,伺服电机一303通过卷轴打开调节板301。
134.辅助轮由振动盘送料装置201到“u”形导轨202,再到长方形容器二304内;此时,步进电机一309有序旋转,使辅助轮进入“n”形活动卡块311后方,“n”形活动卡块311后方红外避障传感器模块一输出信号给微处理器,微处理器控制步进电机停止转动。
135.当辅助轮堆积到“c”形限位条二306上端后,“c”形限位条二306后方红外避障传感器模块一输出信号给微处理器,微处理器控制伺服电机一303通过卷轴使调节板301复位。
136.当辅助轮堆积到“u”形导轨202的右端,距离传感器模块一输出信号给微处理器,微处理器控制振动盘送料装置201暂停。
137.推杆电机一501启动,将垫板上移一个单位高度,之后丝杆电机503开始带动刮条504前移,使得连接套柱进入斜板405上。
138.当距离传感器模块二未检测到连接套柱,丝杆电机503动子前移一个单位距离,丝杆电机503动子前移到长方形容器三401前端后复位,推杆电机一501再次将垫板上移一个单位高度。如此往复。
139.第三步,安装:
140.操作人员从“n”形活动卡块311拿下连接套柱和辅助轮,对机体(轮椅或轮椅部件)进行组装。
141.组装完成后,将下一个机体放置到平行限位架605之间,且位于长方形滑块或圆形滑块上,装置开始重复上述运动。
142.其中,辅助轮取下时,“n”形活动卡块311后方红外避障传感器模块一输出信号给微处理器,步进电机启动,当下一个辅助轮进入后停止。
143.当持续10s辅助轮未进入“n”形活动卡块311后方,则微处理器再次打开调节板301。重复上述运动。
144.第四步,智能性:
145.当操作人员按压暂停按钮,则微处理器会跳过该工作区的电子元件的信号传输和操作,直至操作人员按压启动按钮。
146.第五步,预警:
147.当距离传感器模块一在有操作人员的情况下(未按暂停按钮),持续30s未检测到辅助轮,则输出信号给蜂鸣器和可变色发光二极管,蜂鸣器长鸣,可变色发光二极管显示红色,提醒操作人员备料。
148.当推杆电机一501运行至最大行程时,20秒后微处理器输出信号给蜂鸣器和可变色发光二极管,对应工作区的蜂鸣器短鸣6次,可变色发光二极管显示红色,提醒操作人员备料。
149.实施例2,在实施例1的基础上,在送料轨上增设止回机构。
150.实施例3,在实施例1的基础上,在长方形滑块和圆形滑块上增设圆形凹槽三,圆形凹槽三内设置红外避障传感器模块三,红外避障传感器模块三与微处理器电性连接。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1