一种护栏机器人焊接装置的制作方法
1.本实用新型涉及护栏焊接技术领域,特别涉及一种护栏机器人焊接装置。
背景技术:
2.护栏的立柱通过膨胀螺栓或者预埋与地面固定,通常安装于如物流通道两侧,生产设备周边,建筑墙角,门的两侧及货台边沿等等,护栏主要用于道路、工厂、小区、别墅、庭院、商业区、公共场所等场合中对设备与设施的保护与防护,护栏在我们生活中处处可见。
3.但是现有道路交通护栏的焊接都是以人工焊接为主,效率低下、工作强度高、焊接质量不稳定,在实际使用过程中人工焊接一方面费时费力,另一方面焊接准确度受到影响,实用性不足。
4.因此,有必要提供一种护栏机器人焊接装置解决上述技术问题。
技术实现要素:
5.一要解决的技术问题
6.本实用新型的目的在于提供一种护栏机器人焊接装置,以解决上述背景技术中现有的问题。
7.二技术方案
8.为实现上述目的,本实用新型提供如下技术方案:一种护栏机器人焊接装置,包括机架,所述机架一侧滑动设置有第一移动工装,所述机架另一侧滑动设置有第二移动工装,所述机架中心位置设置有焊接工装;
9.所述机架顶部和底部均设置有滑轨,所述第一移动工装、第二移动工装的底端和顶端均固定设置有与滑轨相配合的滑条,所述滑轨外侧固定设置有齿条,所述第一移动工装和第二移动工装底部均设置有驱动电机,所述驱动电机输出端固定连接有传动轴,所述传动轴底端固定连接有与齿条相啮合的齿轮。
10.具体使用时,通过齿轮与齿条的啮合可以带动移动工装在机架上下两个滑轨之间滑动,当第一移动工装移动至焊接工装位置时停止移动,通过焊接工装上的上焊枪和下焊枪对栏杆进行焊接,焊接完成之后,通过驱动电机带动第一移动工装向左移动,可以将焊接完成的护栏取下,同时,带动第二移动工装向左移动,可以对装配好的护栏进行焊接,通过第一移动工装和第二移动工装地配合可以高效地对护栏进行焊接,并且操作简单,相比于传统地利用人工进行焊接,效率更高,焊接更加准确,实用性强。
11.作为本实用新型的进一步方案,所述第一移动工装和第二移动工装均包括滑动连接于机架上的支撑架,所述支撑架一侧固定设置有多个限位柱,相邻两个限位柱设置为一组。
12.具体使用时,将栏杆放置在下梁顶部,使得栏杆卡在相邻两个限位柱之间可以对栏杆进行限位和定位。
13.作为本实用新型的进一步方案,相邻两个所述限位柱之间设置有限位块,所述限
位块通过螺钉与支撑架相固定。
14.具体使用时,将连接片卡在限位块上可以对连接片进行限位。
15.作为本实用新型的进一步方案,所述限位块上设置有限位槽。
16.具体使用时,限位槽有利于连接片的安装。
17.作为本实用新型的进一步方案,所述支撑架前侧装配有护栏,所述护栏包括下梁、栏杆和连接片,所述栏杆设置于下梁顶部,所述连接片设置于相邻两个所述栏杆之间。
18.具体使用时,将栏杆放置在下梁顶部,使得栏杆卡在相邻两个限位柱之间,然后将连接片置于相邻两个栏杆之间,使连接片卡在限位块上的限位槽处可以对护栏进行安装。
19.作为本实用新型的进一步方案,所述焊接工装包括固定设置于机架顶部的焊机,所述焊机底部设置有上焊枪和下焊枪,所述上焊枪和下焊枪均与焊机电性连接。
20.具体使用时,焊机有利于对护栏进行焊接。
21.作为本实用新型的进一步方案,所述机架由铝合金材料制成。
22.三有益效果
23.本实用新型所述的一种护栏机器人焊接装置,通过驱动电机输出端带动传动轴转动,传动轴可以带动其底端的齿轮转动,通过齿轮与齿条的啮合可以带动移动工装在机架上下两个滑轨之间滑动,当第一移动工装移动至焊接工装位置时停止移动,通过焊接工装上的上焊枪和下焊枪对栏杆进行焊接,焊接完成之后,通过驱动电机带动第一移动工装向左移动,可以将焊接完成的护栏取下,同时,带动第二移动工装向左移动,可以对装配好的护栏进行焊接,通过第一移动工装和第二移动工装地配合可以高效地对护栏进行焊接,并且操作简单,相比于传统地利用人工进行焊接,效率更高,焊接更加准确,实用性强。
附图说明
24.下面结合附图和实施例对本实用新型进一步说明。
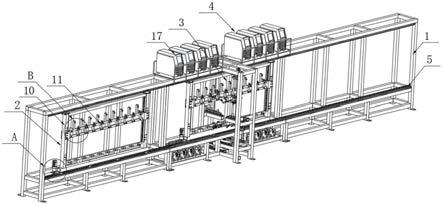
25.图1是本实用新型的整体结构示意图;
26.图2是本实用新型的主视图;
27.图3是本实用新型的俯视图;
28.图4是本实用新型的护栏结构示意图;
29.图5是本实用新型图1的a部结构放大图;
30.图6是本实用新型图1的b部结构放大图。
31.图中:1、机架;2、第一移动工装;3、第二移动工装;4、焊接工装;5、滑轨;6、齿条;7、驱动电机;8、传动轴;9、齿轮;10、支撑架;11、限位柱;12、限位块;13、限位槽;14、下梁;15、栏杆;16、连接片;17、焊机。
具体实施方式
32.如图1、2、3、5、6所示,一种护栏机器人焊接装置,包括机架1,所述机架1一侧滑动设置有第一移动工装2,所述机架1另一侧滑动设置有第二移动工装3,所述机架1中心位置设置有焊接工装4;
33.所述机架1顶部和底部均设置有滑轨5,所述第一移动工装2、第二移动工装3的底端和顶端均固定设置有与滑轨5相配合的滑条,所述滑轨5外侧固定设置有齿条6,所述第一
移动工装2和第二移动工装3底部均设置有驱动电机7,所述驱动电机7输出端固定连接有传动轴8,所述传动轴8底端固定连接有与齿条6相啮合的齿轮9。
34.具体使用时,通过齿轮9与齿条6的啮合可以带动移动工装在机架1上下两个滑轨5之间滑动,当第一移动工装2移动至焊接工装4位置时停止移动,通过焊接工装4上的上焊枪和下焊枪对栏杆15进行焊接,焊接完成之后,通过驱动电机7带动第一移动工装2向左移动,可以将焊接完成的护栏取下,同时,带动第二移动工装3向左移动,可以对装配好的护栏进行焊接,通过第一移动工装2和第二移动工装3地配合可以高效地对护栏进行焊接,并且操作简单,相比于传统地利用人工进行焊接,效率更高,焊接更加准确,实用性强。
35.如图4-5所示,作为本实用新型的进一步方案,所述第一移动工装2和第二移动工装3均包括滑动连接于机架1上的支撑架10,所述支撑架10一侧固定设置有多个限位柱11,相邻两个限位柱11设置为一组。
36.具体使用时,将栏杆15放置在下梁14顶部,使得栏杆15卡在相邻两个限位柱11之间可以对栏杆进行限位和定位。
37.如图4-6所示,作为本实用新型的进一步方案,相邻两个所述限位柱11之间设置有限位块12,所述限位块12通过螺钉与支撑架10相固定。
38.具体使用时,将连接片16卡在限位块12上可以对连接片16进行限位。
39.如图6所示,作为本实用新型的进一步方案,所述限位块12上设置有限位槽13。
40.具体使用时,限位槽13有利于连接片16的安装。
41.如图4所示,作为本实用新型的进一步方案,所述支撑架10前侧装配有护栏,所述护栏包括下梁14、栏杆15和连接片16,所述栏杆15设置于下梁14顶部,所述连接片16设置于相邻两个所述栏杆15之间。
42.具体使用时,将栏杆15放置在下梁14顶部,使得栏杆15卡在相邻两个限位柱11之间,然后将连接片16置于相邻两个栏杆15之间,使连接片16卡在限位块12上的限位槽13处可以对护栏进行安装。
43.如图2所示,作为本实用新型的进一步方案,所述焊接工装4包括固定设置于机架1顶部的焊机17,所述焊机17底部设置有上焊枪和下焊枪,所述上焊枪和下焊枪均与焊机17电性连接。
44.具体使用时,焊机17有利于对护栏进行焊接。
45.如图1所示,作为本实用新型的进一步方案,所述机架1由铝合金材料制成。
46.工作原理:通过设置有第一移动工装2和第二移动工装3,使用时将需要焊接的护栏放置在第一移动工装2上,具体安装方法为,首先将下梁14放置在第一移动工装2的底部,然后将栏杆15放置在下梁14顶部,使得栏杆15卡在相邻两个限位柱11之间,然后将连接片16置于相邻两个栏杆15之间,使连接片16卡在限位块12上的限位槽13处,当护栏安装完之后位于焊接工装4处的第二移动工装3焊接完成,此时通过驱动电机7带动第二移动工装3移动至机架1的最右侧,可以将焊接完成的护栏取下,并且接着将需要焊接的护栏装配至第二移动工装3上,此时通过驱动电机7输出端带动传动轴8转动,传动轴8可以带动其底端的齿轮9转动,通过齿轮9与齿条6的啮合可以带动移动工装在机架1上下两个滑轨5之间滑动,当第一移动工装2移动至焊接工装4位置时停止移动,通过焊接工装4上的上焊枪和下焊枪对栏杆15进行焊接,焊接完成之后,通过驱动电机7带动第一移动工装2向左移动,可以将焊接
完成的护栏取下,同时,带动第二移动工装3向左移动,可以对装配好的护栏进行焊接,通过第一移动工装2和第二移动工装3地配合可以高效地对护栏进行焊接,并且操作简单,相比于传统地利用人工进行焊接,效率更高,焊接更加准确,实用性强。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1