一种油箱端盖双工位焊接机的机器人行走结构的制作方法
1.本实用新型涉及油箱端盖焊接机器人的移动技术领域,更具体的是涉及一种油箱端盖双工位焊接机的机器人行走结构。
背景技术:
2.飞机上或汽车上装燃料的容器叫做油箱,油箱可分为开式油箱和闭式油箱两种,油箱必须有足够大的容积,油箱应有周边密封的盖板,盖板上装有空气滤清器,油箱底部应距地面150mm以上,对油箱内表面的防腐处理要给予充分的注意,油箱上需要对端盖进行焊接,对油箱端盖的焊接需要相应的焊接装置。
3.现有技术中申请号为cn112756856a的专利公开了一种油箱端盖焊接装置,该焊接装置包括机体,机体上水平滑动连接有一对滑动座,每个滑动座上均竖直设置有支撑座,一对支撑座相互靠近的一侧均转动连接有用于固定端盖的夹头;夹头包括固定盘和安装盘,固定盘和安装盘的外边缘位置处均匀分布有若干支撑杆,固定盘与支撑座转动连接,安装盘用于固定端盖;安装盘的四周均设置有矩形的安装孔,安装孔内嵌设有长条形的安装块,安装块背离固定盘的一侧设置有用于夹持端盖外壁的夹条,安装块滑动连接于安装孔,固定盘上设置有用于驱动安装块相互靠近或远离的驱动机构,通过该焊接装置可以降低对油箱端盖焊接的劳动强度。
4.但是,上述油箱端盖焊接装置中对端盖焊接的焊接机器人是固定安装的,这样不便于焊接机器人对不同部位的油箱端盖进行焊接。因此,我们迫切的需要一种便于焊接机器人移动,从而更加便于对不同部位的油箱端盖进行焊接的机器人行走结构。
技术实现要素:
5.基于以上问题,本实用新型提供了一种油箱端盖双工位焊接机的机器人行走结构,用于解决现有技术中不便于焊接机器人移动,从而不便于焊接机器人对不同部位的油箱端盖进行焊接的问题。本实用新型中通过在独立的滑动架上安装焊接机器人和旋转电机,如此可以单独控制每个滑动架上的焊接机器人移动,从而更加便于对不同部位的油箱端盖进行焊接,同时由于在轨道上安装有多组滑动件,所以就会有多个焊接机器人,从而可以更加高效的对油箱的端盖进行焊接。
6.本实用新型为了实现上述目的具体采用以下技术方案:
7.一种油箱端盖双工位焊接机的机器人行走结构,包括多个立柱,所述立柱的顶面安装有横梁,所述横梁的顶面沿其长度方向安装有轨道和齿条,所述轨道上安装有多组滑动件,每组所述滑动件上安装有滑动架,所述滑动架上安装有焊接机器人和旋转电机,所述旋转电机的电机轴上安装有与齿条啮合的齿轮。
8.优选的,每组所述滑动件包括多个滑块,每组所述滑动件的顶面通过连接板与滑动架连接。
9.滑动架的优选结构为:所述滑动架包括依次连接的第一竖架、横架和第二竖架,所
述焊接机器人安装在第一竖架上,所述横架的底面与连接板连接,所述旋转电机安装在横架上,所述第二竖架上安装有焊丝桶。
10.进一步的,所述立柱间还安装有挡弧机构,所述挡弧机构包括安装在立柱侧面的竖直板,所述竖直板上沿其高度方向开有竖直槽,所述竖直板间安装有升降板,所述升降板的两端位于竖直槽内,所述升降板上连接有升降组件,所述升降板上沿其长度方向安装有升降挡弧帘。
11.优选的,所述升降组件包括安装在立柱侧面的多个侧向滑轮,所述立柱的下部还安装有多个底面滑轮,多个所述侧向滑轮与多个所述底面滑轮间缠绕有升降绳,所述升降绳的一端与升降板连接,另一端连接有伸缩单元。
12.优选的,所述伸缩单元包括安装在立柱上的伸缩气缸,所述伸缩气缸的活塞杆与升降绳连接。
13.优选的,所述横梁的侧面安装有多个线槽,多个所述线槽与焊接机器人一一对应,所述线槽内安装有线管,所述线管的一端与滑动架连接。
14.本实用新型的有益效果如下:
15.(1)本实用新型中通过在独立的滑动架上安装焊接机器人和旋转电机,如此可以单独控制每个滑动架上的焊接机器人移动,从而更加便于对不同部位的油箱端盖进行焊接,同时由于在轨道上安装有多组滑动件,所以就会有多个焊接机器人,从而可以更加高效的对油箱的端盖进行焊接。
16.(2)本实用新型中通过多个滑块与连接板连接,连接板再与滑动架连接,这样滑动架沿轨道滑动时会更加稳定;通过在滑动架上安装焊丝桶,在焊丝桶里面可以装焊丝,从而可以更加便于把焊丝装在焊接机器人上。
17.(3)本实用新型中通过在立柱间安装升降挡弧帘,升降挡弧帘可以挡住焊接机器人焊接时产生的焊光,从而可以对操作人员和周围的人进行更好的保护。
18.(4)本实用新型中当需要将升降挡弧帘调高时,可以使伸缩气缸的活塞杆收缩拉动伸缩绳,伸缩绳再绕着侧向滑轮和底面滑轮移动,最终拉动升降挡弧帘向上移动;当需要将升降挡弧帘向下调节时,可以使伸缩气缸的活塞杆伸出,此时伸缩绳处于松弛状态,在升降板和升降挡弧帘重力的作用下,升降板和升降挡弧帘会向下移动,直到升降挡弧帘位于想要的高度后,再停止伸缩气缸的活塞杆伸出,使伸缩气缸的活塞杆拉住升降绳,即可固定住升降挡弧帘,这样更加便于调节升降挡弧帘的高度,从而更好的对操作人员和周围的人进行保护。
附图说明
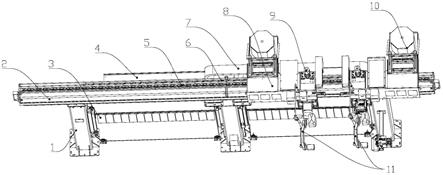
19.图1为本实用新型的立体结构简图;
20.图2为本实用新型旋转电机、齿轮和齿条啮合的局部立体结构简图;
21.图3为本实用新型滑块安装在轨道上的立体局部结构简图;
22.图4为本实用新型线管安装在线槽内的立体局部结构简图;
23.图5为本实用新型滑动架安装在横梁上的立体局部结构简图;
24.图6为本实用新型挡弧机构的立体结构简图;
25.图7为本实用新型挡弧机构的正面结构简图;
26.附图标记:1立柱,2横梁,3挡弧机构,31侧向滑轮,32升降板,33升降挡弧帘,34伸缩气缸,35底面滑轮,36升降绳,37竖直槽,38竖直板,4线槽,5轨道,6齿条,7线管,8滑动架,81第一竖架,82横架,83第二竖架,9旋转电机,10焊丝桶,11焊接机器人,12齿轮,13连接板,14滑块。
具体实施方式
27.为了本技术领域的人员更好的理解本实用新型,下面结合附图和以下实施例对本实用新型作进一步详细描述。
28.实施例1:
29.如图1-5所示,一种油箱端盖双工位焊接机的机器人行走结构,包括多个立柱1,立柱1的顶面安装有横梁2,横梁2的顶面沿其长度方向安装有轨道5和齿条6,轨道5上安装有多组滑动件,每组滑动件上安装有滑动架8,滑动架8上安装有焊接机器人11和旋转电机9,旋转电机9的电机轴上安装有与齿条6啮合的齿轮12。
30.滑动架8的优选结构为:滑动架8包括依次连接的第一竖架81、横架82和第二竖架83,焊接机器人11安装在第一竖架81上,横架82的底面与连接板13连接,旋转电机9安装在横架82上,第二竖架83上安装有焊丝桶10。第一竖架81、横架82和第二竖架83构成的滑动架8呈倒u形,这样便于滑动架8的滑动,同时便于安装焊丝桶10和焊接机器人11,在焊丝桶10里面可以装焊丝,从而可以更加便于把焊丝装在焊接机器人11上。
31.优选的,横梁2的侧面安装有多个线槽4,多个线槽4与焊接机器人11一一对应,线槽4内安装有线管7,线管7的一端与滑动架8连接,当焊接机器人11移动时,滑动架8会带动线管7在线槽4内移动,这样更加便于对焊接机器人11进行布置线路。
32.工作原理:立柱1的数量可以根据实际情况来设置,比如可以设置三个立柱1,三个立柱1依次平行设置,就会产生两个焊接工位,对应的滑动件就可以设置为两组,两组滑动件就会对应两个独立的滑动架8,两个滑动架8上就会分别安装一个焊接机器人11,两个焊接机器人11会相互独立的工作,每组滑动件还可以包括多个滑块14,每组滑动件的顶面通过连接板13与滑动架8连接,这样滑动架8沿轨道5滑动时会更加稳定,焊接机器人11工作的时候就会更加稳定;
33.当需要调节焊接机器人11的移动,对不同位置的油箱端盖进行焊接时,通过常规的方式控制旋转电机9旋转,旋转电机9带动齿轮12旋转,由于齿轮12与齿条6相互啮合,且旋转电机9安装在滑动架8上,因此旋转电机9和滑动架8会沿着齿条6移动,当旋转电机9反向旋转时会带动滑动架8和该滑动架8上的焊接机器人11反向移动,这样就可以使焊接机器人11沿横梁2的长度方向移动,从而更加便于对不同部位的油箱端盖进行焊接;同时,由于横梁2上的滑动架8是相互独立的,所以每个滑动架8上都会有一个相应的旋转电机9,这样每个滑动架8就会相互独立的沿着横梁2的长度方向滑动,因此每个滑动架8上的焊接机器人11就会相互独立的工作,这样就可以同时对多个工位的油箱进行焊接,从而可以提高对油箱端盖的焊接效率。
34.实施例2:
35.如图1-7所示,在上述实施例1的基础上,本实施例给出了挡住焊接时焊丝产生的光的优选结构,立柱1间还安装有挡弧机构3,挡弧机构3包括安装在立柱1侧面的竖直板38,
竖直板38上沿其高度方向开有竖直槽37,竖直板38间安装有升降板32,升降板32的两端位于竖直槽37内,升降板32上连接有升降组件,升降板32上沿其长度方向安装有升降挡弧帘33。
36.本实施例中:操作人员站在立柱1的旁边工作,在相邻的两个立柱1间安装升降挡弧帘33,升降挡弧帘33可以挡住焊接机器人11焊接时产生的焊光,从而可以对操作人员和周围的人进行更好的保护。
37.优选的,升降组件包括安装在立柱1侧面的多个侧向滑轮31,立柱1的下部还安装有多个底面滑轮35,多个侧向滑轮31与多个底面滑轮35间缠绕有升降绳36,升降绳36的一端与升降板32连接,另一端连接有伸缩单元,伸缩单元包括安装在立柱1上的伸缩气缸34,伸缩气缸34的活塞杆与升降绳36连接。其中,侧向滑轮31和底面滑轮35的结构和安装方式均是常规的,伸缩气缸34的控制方式,伸缩气缸34的活塞杆与升降绳36的连接也常规的,当需要将升降挡弧帘33调高时,可以使伸缩气缸34的活塞杆收缩拉动伸缩绳,伸缩绳再绕着侧向滑轮31和底面滑轮35移动,最终拉动升降挡弧帘33向上移动;当需要将升降挡弧帘33向下调节时,可以使伸缩气缸34的活塞杆伸出,此时伸缩绳处于松弛状态,在升降板32和升降挡弧帘33重力的作用下,升降板32和升降挡弧帘33会向下移动,直到升降挡弧帘33位于想要的高度后,再停止伸缩气缸34的活塞杆伸出,使伸缩气缸34的活塞杆拉住升降绳36,即可固定住升降挡弧帘33,这样更加便于调节升降挡弧帘33的高度,从而可以更好的对操作人员和周围的人进行保护。
38.如上即为本实用新型的实施例。上述实施例以及实施例中的具体参数仅是为了清楚表述实用新型验证过程,并非用以限制本实用新型的专利保护范围,本实用新型的专利保护范围仍然以其权利要求书为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1