极耳焊接用载具的制作方法
1.本实用新型涉及动力电池生产设备领域,尤其涉及极耳焊接用载具。
背景技术:
2.作为组成用于电动车的动力电池模组的一种电池例如铝壳电池的结构,通常包括铝壳、容置在铝壳内的电芯、封装铝壳的顶盖等。顶盖上设置有和电芯的极耳(正负极)通过焊接的方式连接的极柱等。
3.在对顶盖上的极柱和电芯的极耳进行焊接的时候,通常需要使用载具等装夹电芯以及顶盖,从而对极耳进行焊接。已知的极耳焊接用载具通常设置在单机设备上,通过例如气缸、电机等驱动载具上的各种夹持装置等。然而,随着电池的新结构的产生以及用于生产动力电池的生产线的更新换代等,已知的极耳焊接用载具并不能通用于新的电池结构或者新的生产设备。
技术实现要素:
4.本实用新型旨在至少一定程度上解决现有技术所存在的问题之一。为此,本实用新型提出了一种极耳焊接用载具,能够无需外部动力而使动力电池的电芯的极耳以及顶盖的极耳连接片保持在相互接触状态。
5.根据本实用新型一方面的极耳焊接用载具,用于载置并保持动力电池的电芯以及顶盖。
6.该极耳焊接用载具具有:
7.基板,所述基板的第三方向的一侧,设置有用于保持第一电芯以及与所述第一电芯对应的第一顶盖的第一保持部,所述第一保持部包括:用于保持所述第一电芯的一个电芯保持部、用于夹持所述第一顶盖的一个夹持装置、以及用于保持所述第一电芯的极耳和所述第一顶盖的极耳连接片的接触状态的一个保持装置。
8.其中,所述夹持装置设置在所述电芯保持部的所述第三方向的一侧,并具有:第一夹爪以及第二夹爪,所述第一夹爪以及所述第二夹爪沿与所述第三方向正交的第一方向可被驱动以相互靠近或者远离。第一弹性组件,设置为以使所述第一夹爪以及所述第二夹爪沿所述第一方向相互靠近的方式对所述第一夹爪以及所述第二夹爪施力。
9.其中,所述保持装置具有:第三夹爪,位于所述电芯保持部的所述第一方向的一侧,沿所述第一方向可移动。第四夹爪,位于所述电芯保持部的所述第一方向的另一侧并和所述第三夹爪相对,沿所述第一方向可移动。第三弹性组件,设置为以使所述第三夹爪以及所述第四夹爪分别沿所述第一方向朝所述电芯保持部移动的方式,对所述第三夹爪以及所述第四夹爪施力。第一止动组件,设置为在所述第三夹爪沿所述第一方向朝所述电芯保持部的外侧移动到第一预设位置时,使所述第三夹爪沿所述第一方向朝所述电芯保持部的移动被限制。第二止动组件,设置为在所述第四夹爪沿所述第一方向朝所述电芯保持部的外侧移动到第二预设位置时,使所述第四夹爪沿所述第一方向朝所述电芯保持部的移动被限
制。
10.根据本实用新型的极耳焊接用载具,具有如下有益效果:能够无需外部动力而使动力电池的电芯的极耳以及顶盖的极耳连接片保持在相互接触状态。
11.在一些实施例中,所述第一保持部还包括:一个隔板组件,所述隔板组件设置在所述电芯保持部的所述第三方向的另一侧,沿所述第三方向可被驱动以伸到所述电芯保持部的上方或者从所述电芯保持部的上方离开。
12.在一些实施例中,所述基板的所述第三方向的另一侧,设置有用于保持第二电芯以及与所述第二电芯对应的第二顶盖的第二保持部,所述第二保持部包括:另一个所述电芯保持部、另一个所述夹持装置、以及另一个所述保持装置;其中,另一个所述夹持装置设置在另一个所述电芯保持部的所述第三方向的另一侧;另一个所述保持装置的所述第三夹爪以及所述第四夹爪分别位于另一个所述电芯保持部的所述第一方向的两侧。
13.在一些实施例中,所述基板的所述第三方向的另一侧,设置有用于保持第二电芯以及与所述第二电芯对应的第二顶盖的第二保持部,所述第二保持部包括:另一个所述电芯保持部、另一个所述夹持装置、另一个所述保持装置、以及另一个所述隔板组件;其中,另一个所述夹持装置设置在另一个所述电芯保持部的所述第三方向的另一侧;另一个所述保持装置的所述第三夹爪以及所述第四夹爪分别位于另一个所述电芯保持部的所述第一方向的两侧;另一个所述隔板组件设置在另一个所述电芯保持部的所述第三方向的一侧。
14.在一些实施例中,所述第一保持部的一个所述隔板组件和所述第二保持部的另一个所述隔板组件沿上下方向至少部分重合。
15.在一些实施例中,所述夹持装置还包括:第一驱动件,所述第一驱动件位于所述第一夹爪以及所述第二夹爪之间并分别和所述第一夹爪以及所述第二夹爪传动连接,所述第一驱动件沿与所述第一方向正交的第二方向被驱动伸出或者缩回;所述第一驱动件上设置有第一引导部,所述第一引导部形成为在所述第一驱动件被驱动伸出时使所述第一夹爪以及所述第二夹爪沿所述第一方向相互远离,且形成为在所述第一驱动件被驱动缩回时容许所述第一夹爪以及所述第二夹爪沿所述第一方向相互靠近。
16.在一些实施例中,还包括:第二驱动件,一端和所述第三夹爪连接,另一端沿所述第一方向朝所述基板的外侧延伸;第三驱动件,一端和所述第四夹爪连接,另一端沿所述第一方向朝所述基板的外侧延伸。
17.在一些实施例中,所述第一止动组件具有:第三阻挡件以及第一限制件,所述第三阻挡件设置在所述基板上,所述第一限制件和所述第三夹爪连接,在所述第三夹爪沿所述第一方向朝所述电芯保持部的外侧移动到所述第一预设位置时,所述第一限制件沿朝向所述第三阻挡件的方向移动并被所述第三阻挡件阻挡;所述第二止动组件具有:第四阻挡件以及第二限制件,所述第四阻挡件设置在所述基板上,所述第二限制件和所述第四夹爪连接,在所述第四夹爪沿所述第一方向朝所述电芯保持部的外侧移动到所述第二预设位置时,所述第二限制件沿朝向所述第四阻挡件的方向移动并被所述第四阻挡件阻挡。
18.在一些实施例中,所述隔板组件包括:第四基座;隔板,所述隔板的长度方向的长度大于所述电芯的长度方向的长度,所述隔板的长度方向的一端的第一端部被固定到所述第四基座,所述隔板的长度方向的另一端的第二端部呈悬臂状并朝所述电芯保持部的方向延伸;第一支撑板,设置在所述隔板的长度方向的一侧,并和所述第二端部连接;第二支撑
板设置在所述隔板的长度方向的另一侧,并和所述第二端部连接;所述第一支撑板和第二支撑板分别至少沿所述隔板的厚度方向的一侧突出,所述第一支撑板和所述电芯的长度方向的一侧的极耳相对,所述第二支撑板和所述电芯的长度方向的另一侧的极耳相对。
19.在一些实施例中,所述隔板组件还包括:第五基座,所述第四基座沿所述第一方向可浮动地安装到所述第五基座;第四弹性组件,所述第四弹性组件沿所述第一方向对所述第四基座施力。
附图说明
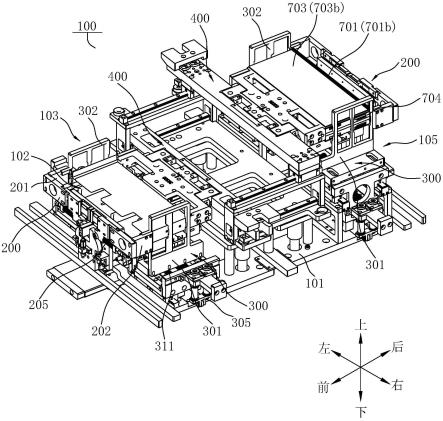
20.图1是本实用新型的极耳焊接用载具的一种实施例的立体图。
21.图2是图1中的第一保持部的夹持装置的前视方向的示意图。
22.图3是图1中的夹持装置的后视方向的示意图。
23.图4是图2中的a处的局部放大图。
24.图5是图1中的第一保持部的保持装置的前视方向的示意图。
25.图6是图1中的第一保持部的保持装置的前视方向的主视图。
26.图7是图5中的保持装置的前视方向的立体图。
27.图8是图5中的保持装置的后视方向的立体图。
28.图9是图1中的隔板组件的后视方向的示意图。
29.图10是图9中的隔板组件的要部的示意图。
30.图11是图10中的隔板组件的爆炸图。
31.图12是本实用新型的极耳焊接用载具所载置的电芯以及顶盖的示意图。
具体实施方式
32.下面详细描述本实施方式的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实施方式,而不能理解为对本实施方式的限制。
33.在本实施方式的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实施方式和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实施方式的限制。
34.在本实施方式的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
35.本实施方式的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本实施方式中的具体含义。
36.此外,在下面的说明中,为便于说明,以附图中的左右方向表示“第一方向”,以附图中的正交于左右方向的上下方向表示“第二方向”,以附图中的分别正交于左右方向以及
上下方向的前后方向表示“第三方向”。
37.参照图12,在说明本实施方式的极耳焊接用载具100之前,首先对极耳焊接用载具100所载置的电芯703以及顶盖701进行简要说明。具体而言,该电芯703为动力电池的电芯703,该电芯703呈长方体形状,电芯703的长度方向的分别设置有极耳704。此外,该动力电池还包括顶盖701,顶盖701的长度方向的两端,分别设置有用于和电芯703的极耳704连接的极耳连接片702。极耳连接片702和极耳704通过激光进行焊接。此外,一个动力电池可以具有一个电芯703,也可以具有两个电芯703(例如图12中具有两个电芯703)。
38.图1是极耳焊接用载具100的立体图。参照图1,根据实施方式的极耳焊接用载具100(为便于说明,后面有时会仅称“载具100”),用于载置并保持动力电池的电芯703以及顶盖701。该极耳焊接用载具100具有:基板101,基板101的第三方向的一侧,设置有用于保持电芯703(为了便于区分,有时也称“第一电芯703a”)以及与第一电芯703a对应的顶盖701(为了便于区分,有时也称“第一顶盖701a”)的第一保持部103。第一保持部103包括:用于保持电芯703的一个电芯保持部102、用于夹持顶盖701的一个夹持装置200、以及用于保持电芯703的极耳704和顶盖701的极耳连接片702(附图1中被极耳704遮住看不到)的接触状态的一个保持装置300。
39.其中,夹持装置200设置在电芯保持部102的第三方向的一侧,并具有:一对夹爪(为便于区分,有时也称“第一夹爪201”以及“第二夹爪202”)和弹性组件(为了便于区分,有时也称“第一弹性组件205”)。第一夹爪201以及第二夹爪202沿与第三方向正交的第一方向可被驱动以相互靠近或者远离。第一弹性组件205设置为以使第一夹爪201以及第二夹爪202沿第一方向相互靠近的方式对第一夹爪201以及第二夹爪202施力。
40.其中,保持装置300具有:一对夹爪(为便于区分,有时也称“第三夹爪301”以及“第四夹爪302”)、弹性组件(为便于区分,有时也称“第三弹性组件311”)以及一对止动组件(为便于区分,有时也称“第一止动组件305”以及“第二止动组件306”)。其中,第三夹爪301位于电芯保持部102的第一方向的一侧并沿第一方向可移动。第四夹爪302位于电芯保持部102的第一方向的另一侧并和第三夹爪301相对。并且,第四夹爪302也沿第一方向可移动。第三弹性组件311设置为以使第三夹爪301以及第四夹爪302分别沿第一方向朝电芯保持部102移动的方式,对第三夹爪301以及第四夹爪302施力。第一止动组件305设置为在第三夹爪301沿第一方向朝电芯保持部102的外侧移动到第一预设位置时,使第三夹爪301沿第一方向朝电芯保持部102的移动被限制。第二止动组件306设置为在第四夹爪302沿第一方向朝电芯保持部102的外侧移动到第二预设位置时,使第四夹爪302沿第一方向朝电芯保持部102的移动被限制。
41.根据本实施方式的载具100,能够无需外部动力而使动力电池的电芯703的极耳704以及顶盖701的极耳连接片702保持在相互接触状态,因此,本实施方式的载具100能够应用在例如流水线上。
42.具体而言,由于流水线的载具100通常需要被循环搬运,而例如气缸、电机等的驱动力,由于需要连接气管、电缆等的元件,而难以被直接应用于流水线的载具。在本实施方式中,由于第一夹爪201以及第二夹爪202能够通过第一弹性组件205而保持夹持状态(初始状态或者关闭状态)。此外,无需在载具100上搭载这些需要连接气管、电缆等的元件,而能够保持夹持顶盖701的状态。
43.此外,由于第三弹性组件311以使第三夹爪301以及第四夹爪302分别沿第一方向朝电芯保持部102移动的方式,对第三夹爪301以及第四夹爪302施力,因此,能够无需外部动力而使第三夹爪301以及第四夹爪302保持夹持状态(关闭状态),而能够保持夹持电芯的状态。
44.进一步地,由于设置有在第三夹爪301沿第一方向移动到第一预设位置时使其沿第一方向朝电芯保持部102的移动被限制的第一止动组件305,并且设置有在第四夹爪302沿第一方向移动到第二预设位置时使其沿第一方向朝电芯保持部102的移动被限制的第二止动组件306,因此,能够无需外部动力而使第三夹爪301以及第四夹爪302分别保持在打开状态。由此,能够解除对电芯703的保持,从而实现对电芯703的上下料或者其他的工序(后述)。
45.据此,本实施方式的载具100,无需在载具100上额外增加用于驱动夹持装置200、保持装置300的动力,而只需在例如流水线的预设的位置安装用于打开第一夹爪201以及第二夹爪202、第三夹爪301以及第四夹爪302、第一止动组件305以及第二止动组件306的驱动装置(例如气缸、电机等)即可。
46.电芯保持部102例如可以是现有的电芯保持治具等。电芯保持部102例如沿左右方向设置在基板101的中部,夹持装置200例如沿前后方向设置在电芯保持部102的前侧。电芯可以通过例如机器人等的现有的自动上料装置被送到电芯保持部102。在第三夹爪301以及第四夹爪302分别保持在打开状态时,可以对电芯进行上下料。顶盖701也可以通过例如机器人等的现有的自动上料装置被送到夹持装置200。夹持装置200和电芯保持部102之间的位置可以根据极耳704的焊接的位置适当地设定。即,夹持装置200只要设置为在夹持顶盖701的状态下,顶盖701的长度方向的两侧的极耳连接片702能够接触电芯703的长度方向的两侧的极耳704,从而实现准确地焊接即可。
47.在一些实施例中,为了匹配不同的动力电池生产工艺,第一保持部103还可以包括:一个隔板组件400。隔板组件400设置在电芯保持部102的第三方向的另一侧(附图中为后侧),沿第三方向可被驱动以伸到电芯保持部102的上方或者从电芯保持部102的上方离开。具体而言,在一些动力电池结构中,铝壳内可能会容置有两块电芯。两块电芯沿厚度方向叠装并通过粘接带等绑定在一起。为了防止电芯沿厚度方向过度叠装导致挤压等,在电芯叠装之前,通常会在一块电芯的上部插入一块隔板,然后再叠装另一块电芯,在完成电芯的叠装之后抽掉隔板。由此,能够在两块电芯之间形成一定的间隙,从而防止电芯过度挤压等。因此,在本实施例中,为了匹配铝壳内容置有例如两块电芯的动力电池,可以将隔板组件400设置在第一保持部103的电芯保持部102的后侧,和夹持装置200相对电芯保持部102沿前后方向相对。
48.在一些实施例中,为了提高动力电池的生产效率,可以在载具100上载置多个电芯。例如,基板101的第三方向的另一侧(附图中为后侧),可以设置有用于保持另一块的电芯703(为了便于区分,有时也称“第二电芯703b”)以及与该另一块电芯703对应的顶盖701(为了便于区分,有时也称“第二顶盖701b”)的第二保持部105。和第一保持部103类似,第二保持部105可以包括:另一个电芯保持部102、另一个夹持装置200、以及另一个保持装置300。其中,和第一保持部103的夹持装置200相反,第二保持部105的另一个夹持装置200设置在第二保持部105的另一个电芯保持部102的第三方向的另一侧(附图中为后侧)。和第一
保持部103的保持装置300一样,第二保持部105的另一个保持装置300的第三夹爪301以及第四夹爪302也分别位于第二保持部105的另一个电芯保持部102的第一方向的两侧。第二保持部105的电芯保持部102、夹持装置200以及保持装置300除了上述的配置位置差别之外,其整体和第一保持部103的电芯保持部102、夹持装置200以及保持装置300相同,因此,在下面的描述中,仅对夹持装置200、保持装置300本身进行整体说明,必要的时候进行区分说明。
49.在基板101上设置有多个保持区域(第一保持部103以及第二保持部105)的情况下,在一些实施例中,第二保持部105还可以包括:另一个隔板组件400。和第一保持部103的隔板组件400相反,第二保持部105的另一个隔板组件400可以设置在另一个电芯保持部102的第三方向的一侧(附图中为前侧)。
50.在设置有多个隔板组件400的情况下,为了使载具100的结构整体更加紧凑,在一些实施例中,第一保持部103的一个隔板组件400和第二保持部105的另一个隔板组件400沿上下方向至少部分重合。具体而言,例如,第一保持部103的隔板组件400和第二保持部105的隔板组件400分别设置在基板101的前后方向的中部,第二保持部105的隔板组件400例如设置在第一保持部103的隔板组件400的上方。由此,能够使两个隔板组件400从俯视方向来看,部分或者全部重叠,从而能够使载具100的整体结构更加紧凑。
51.以下,分别对夹持装置200、保持装置300以及隔板组件400进行更加详细的说明。
52.[夹持装置200]
[0053]
图2是夹持装置200的前视方向的示意图。图3是夹持装置200的后视方向的示意图。图4是图2中的a处的局部放大图。在图4中,为了便于示意,仅显示局部放大图中的主要部分。
[0054]
如上所述,夹持装置200设置在电芯保持部102的第三方向的一侧,并具有:第一夹爪201以及第二夹爪202、第一弹性组件205。
[0055]
参照图2至图4,具体而言,夹持装置200包括:第一夹爪201以及第二夹爪202、第一导向组件203、第一驱动件204以及第一弹性组件205。其中,第一夹爪201以及第二夹爪202沿第一方向相互靠近或者远离。第一导向组件203具有第一导向件206、第一安装件207以及第二安装件208。第一导向件206沿第一方向延伸。第一安装件207以及第二安装件208分别可沿第一导向件206移动。第一夹爪201被支撑于第一安装件207。第二夹爪202被支撑于第二安装件208。第一驱动件204位于第一夹爪201以及第二夹爪202之间并分别和第一夹爪201以及第二夹爪202传动连接。第一驱动件204沿与第一方向正交的第二方向被驱动伸出或者缩回。第一驱动件204上设置有第一引导部209。第一引导部209形成为在第一驱动件204被驱动伸出时(附图中为沿上方向)使第一夹爪201以及第二夹爪202沿第一方向相互远离。并且,第一引导部209还形成为在第一驱动件204被驱动缩回时(附图中为沿下方向)容许第一夹爪201以及第二夹爪202沿第一方向相互靠近。第一弹性组件205设置为以使第一夹爪201以及第二夹爪202沿第一方向相互靠近的方式对第一夹爪201以及第二夹爪202施力。
[0056]
根据本实施方式的夹持装置200,由于第一弹性组件205以使第一夹爪201以及第二夹爪202沿第一方向相互靠近的方式对其施力,因此,能够无需外部动力而使第一夹爪201以及第二夹爪202保持夹持状态。具体而言,例如,在第一驱动件204没有受到外力的状
态下,第一驱动件204处于缩回状态(附图中为位于下方向),第一夹爪201和第二夹爪202通过第一弹性组件205,从而沿第一方向相互靠近。当第一驱动件204受到外力而被驱动伸出时,第一夹爪201和第二夹爪202通过第一引导部209,而克服第一弹性组件205的弹力,从而沿第一方向相互远离。由此,第一夹爪201和第二夹爪202处于张开状态,能够装夹顶盖701。
[0057]
夹持装置200例如可以包括第一基座210,第一基座210安装在例如作为载具100的基板101上。第一导向组件203安装在第一基座210上。第一导向组件203只要能够对第一夹爪201以及第二夹爪202进行直线引导,其结构并不特别限定。例如,第一导向组件203可以选择市售的线性滑轨组件,即:使用线性滑轨作为第一导向件206。此外,线性滑轨组件还包括例如两个滑块,两个滑块分别作为第一安装件207以及第二安装件208而使用。通过使用线性滑轨组件作为第一导向组件203,能够提高第一导向组件203的滑动顺畅度,防止第一夹爪201以及第二夹爪202打开(相互远离)或者关闭(相互靠近)的时候卡滞。
[0058]
第一夹爪201和第二夹爪202只要能够夹持顶盖701,其结构并不特别限定,例如,第一夹爪201和第二夹爪202可以分别大致呈l字状。此外,第一夹爪201和第二夹爪202分别可以通过一体加工成型,也可以通过多个零件组装而成。第一夹爪201可以直接安装在作为第一安装件207的滑块上。此外,为了方便第一夹爪201和其他的部件(例如第一驱动件204、第一弹性组件205等)进行传动连接,第一安装件207上可以安装有第一连接板211,第一夹爪201可以沿第一方向可调节地安装到第一连接板211上。同样地,作为第二安装件208的滑块上也可以安装有第二连接板212,第二夹爪202可以沿第一方向可调节地安装到第二连接板212上。通过将第一夹爪201和第二夹爪202分别设置成沿第一方向可调节,能够根据顶盖701的类型,而容易地调整第一夹爪201和第二夹爪202的初始位置。
[0059]
第一驱动件204可以通过沿上下方向导向的线性滑轨组件(未图示)安装到第一基座210上。第一驱动件204例如可以为板状件。第一引导部209可以直接在第一驱动件204通过加工而形成。例如,可以直接在第一驱动件204的左右两侧加工出预设的轨迹(后述),从而形成第一引导部209。第一夹爪201和第二夹爪202可以分别抵接第一引导部209,此外,在第一夹爪201安装到第一连接板211、第二夹爪202安装到第二连接板212的情况下,也可以是第一连接板211和第二连接板212分别抵接第一引导部209。在第一驱动件204沿上下方向被例如安装在流水线的特定的位置的第一动力装置(未图示)驱动时,第一夹爪201和第二夹爪202随着第一引导部209的轨迹的变化,从而相互靠近或者相互远离。
[0060]
继续参照图4,在一些实施例中,为了简化第一引导部209的结构,第一引导部209可以包括:第一引导面213和第二引导面214。其中,第一引导面213设置在第一驱动件204的和第一夹爪201相对的一侧。第二引导面214则设置在第一驱动件204的和第二夹爪202相对的一侧。由此,第一夹爪201(或者第一连接板211或者后述的第一滚动件215)能够直接抵接第一引导面213,从而能够缩短第一夹爪201和第一引导面213之间的距离,使夹持装置200整体上更加紧凑。同样地,由于第二引导面214设置在第一驱动件204的和第二夹爪202相对的一侧,因此第二夹爪202(或者第二连接板212或者后述的第二滚动件216)能够直接抵接第二引导面214。
[0061]
在一些实施例中,为了容易实现第一夹爪201和第二夹爪202的打开(相互远离)或者关闭(相互靠近),第一引导面213和第二引导面214沿第一方向之间的距离,沿第一驱动件204的伸出方向(附图中为从下往上的方向)逐渐变小。第一引导面213和第二引导面214
的轨迹大致相同,在此主要以第一引导面213为例进行说明,仅在必要的时候说明第二引导面214。第一引导面213例如大致呈圆弧状。第一引导面213沿第一驱动件204的伸出方向距离第一驱动件204的左右方向的中间逐渐减少。
[0062]
在第一驱动件204处在上方位置时,第一夹爪201抵接第一引导面213的下部,第一夹爪201距离第一驱动件204的左右方向的中间的距离变大,同时,第二夹爪202抵接第二引导面214的下部,第二夹爪202距离第一驱动件204的左右方向的中间的距离也变大。即此时,第一夹爪201和第二夹爪202处在打开位置。
[0063]
继续参照图2,在第一驱动件204处在下方位置时,第一夹爪201抵接第一引导面213的上部,第一夹爪201距离第一驱动件204的左右方向的中间的距离变小,同时,第二夹爪202抵接第二引导面214的上部,第二夹爪202距离第一驱动件204的左右方向的中间的距离也变小。即此时,第一夹爪201和第二夹爪202处在关闭位置。
[0064]
在本实施例中,流水线的第一动力装置例如可以设置在夹持装置200的下方,从下往上推动第一驱动件204。即:在本实施例中,第一驱动件204从下往上移动的方向为伸出方向。此外,在别的实施例中,也可以是第一动力装置从上往下拉动第一驱动件204,即:也可以将第一驱动件204从上往下移动的方向作为伸出方向。在此情况下,只需要改变第一引导面213和第二引导面214的引导轨迹即可。
[0065]
继续参照图4,在一些实施例中,为了减少第一夹爪201(或者第一连接板211)以及第二夹爪202(或者第二连接板212),和第一驱动件204之间的摩擦力,提高夹持装置200的顺畅程度,夹持装置200还可以包括:第一滚动件215和第二滚动件216。其中,第一滚动件215和第一夹爪201滚动连接并抵接第一引导面213。第二滚动件216和第二夹爪202滚动连接并抵接第二引导面214。在第一夹爪201安装到第一连接板211、第二夹爪202安装到第二连接板212的情况下,第一滚动件215也可以安装到第一连接板211、第二滚动件216也可以安装第二连接板212。第一滚动件215和第二滚动件216可以分别选择滚轮,第一滚动件215和第二滚动件216可以分别通过公知的安装方式安装到第一连接板211和第二连接板212。
[0066]
继续参照图2、图4,如上所述,第一弹性组件205设置为以使第一夹爪201以及第二夹爪202沿第一方向相互靠近的方式对第一夹爪201以及第二夹爪202施力。在一些实施例中,第一弹性组件205可以包括:第一弹性件217和第二弹性件218。第一弹性件217可以设置在第一夹爪201的一侧,并以使第一滚动件215保持抵接第一引导面213的方式,对第一滚动件215施力。第二弹性件218可以设置在第二夹爪202的一侧,并以使第二滚动件216保持抵接第二引导面214的方式对第二滚动件216施力。第一弹性件217和第二弹性件218的结构大致相同,在此仅以第一弹性件217为例进行说明,仅在必要的情况下提及第二弹性件218。具体而言,第一弹性件217例如可以选择压缩弹簧。第一弹性件217的一端抵接第一连接板211,第一弹性件217的另一端被固定在例如第一基座210的沿左方向远离第一连接板211的一侧。由此,第一弹性件217能够沿右方向推动第一连接板211,从而使安装在第一连接板211的第一滚动件215保持抵接第一引导面213。此外,第二弹性件218也可以沿左方向推动第二连接板212,从而使安装在第二连接板212的第二滚动件216保持抵接第二引导面214。
[0067]
由此,第一弹性件217和第二弹性件218分别在压缩的状态下抵接第一连接板211和第二连接板212。在来自例如流水线的第一动力装置的动力撤掉之后,第一弹性件217和第二弹性件218通过驱动第一连接板211抵接第一引导面213,以及驱动第二连接板212抵接
第二引导面214,从而使第一驱动件204缩回。由此,在流水线的第一动力装置的动力撤掉之后,第一弹性件217和第二弹性件218使第一夹爪201和第二夹爪202恢复到关闭状态(即可夹持的状态)。
[0068]
此外,上面虽然以第一弹性组件205具有第一弹性件217和第二弹性件218为例进行了说明,但是并不限于此。在其他实施例中,第一弹性组件205也可以包括拉簧,拉簧的两端分别拉住第一连接板211和第二连接板212,从而能够使在没有来自外部的动力的情况下,第一夹爪201和第二夹爪202保持在关闭状态(即可夹持的状态)。
[0069]
继续参照图4,并辅助参照图3,在一些实施例中,为了能够精确地控制第一夹爪201和第二夹爪202打开(相互远离)或者关闭(相互靠近)的位置精度,夹持装置200还可以包括:第一阻挡件219和第二阻挡件220,其中,第一阻挡件219设置为沿第一驱动件204的伸出方向阻挡第一驱动件204,第二阻挡件220则设置为沿第一驱动件204的缩回方向阻挡第一驱动件204。第一阻挡件219和第二阻挡件220例如可以分别安装在第一基座210上。第一阻挡件219例如安装在第一基座210的上方,限制第一驱动件204向上移动的行程。第二阻挡件220例如安装在第一基座210的下方,限制第一驱动件204向下移动的行程。由此,能够通过限制第一驱动件204沿上下方向被驱动的行程,从而限制第一夹爪201和第二夹爪202可以打开或者关闭的行程,并由此提高第一夹爪201和第二夹爪202打开或者关闭的位置精度。
[0070]
在一些实施例中,为了便于例如机器人等的现有的自动下料装置对焊接好的电芯和顶盖701进行下料。本实施方式的载具100还可以包括第二导向组件221和第二弹性组件224。作为第二导向组件221,例如可以具有第二导向件222以及第三安装件223。第二导向件222沿分别与第一方向和第二方向正交的第三方向延伸。第三安装件223可沿第一导向件206移动。夹持装置200被支撑于第三安装件223。即,夹持装置200的第一基座210安装在第三安装件223上。第二弹性组件224以使夹持装置200靠近电芯保持部102的方式对夹持装置200施力。具体而言,第二导向组件221和第二弹性组件224例如可以安装在载具100的基板101上。作为第二导向组件221可以参考第一导向组件203进行设置,例如,也可以使用线性滑轨组件作为第二导向组件221。同样地,第二弹性组件224也可以参考第一弹性组件205进行设置。
[0071]
通过设置第二导向组件221和第二弹性组件224,能够使夹持装置200保持靠近电芯保持部102。具体而言,例如,可以在流水线的预设的位置(例如靠近第一动力装置的位置)设置第二动力装置,在第一动力装置驱动夹持装置200打开的同时,第二动力装置驱动夹持装置200远离电芯保持部102。此外,在第二动力装置的动力被撤去后,夹持装置200能够通过第二弹性组件224从而恢复到初始位置。
[0072]
[保持装置300]
[0073]
以下,对保持装置300进行详细说明。
[0074]
图5、图6是保持装置300的前视方向的示意图。图7、图8是保持装置300的立体图。
[0075]
参照图5至图8,如上所述,保持装置300设置在基板101上。保持装置300包括:第三夹爪301、第四夹爪302、第三导向组件303、第四导向组件304、第三弹性组件311、第一止动组件305以及第二止动组件306。
[0076]
第三夹爪301位于电芯保持部102的第一方向的一侧(右侧),并沿第一方向可移
动。第四夹爪302位于电芯保持部102的第一方向的另一侧(左侧)并和第三夹爪301相对。第四夹爪302并沿第一方向可移动。
[0077]
第三导向组件303具有:第三导向件307以及第四安装件308。第三导向件307设置在基板101上并沿第一方向延伸。第四安装件308支撑第三夹爪301并可沿第三导向件307移动。
[0078]
第四导向组件304具有:第四导向件309以及第五安装件310。第四导向件309设置在基板101上并沿第一方向延伸。第五安装件310支撑第四夹爪302并可沿第四导向件309移动。
[0079]
第三弹性组件311设置为以使第三夹爪301以及第四夹爪302分别沿第一方向朝基板101的内侧移动的方式,对第三夹爪301以及第四夹爪302施力。
[0080]
第一止动组件305具有:第三阻挡件312以及第一限制件313。第三阻挡件312设置在基板101上。第一限制件313和第三夹爪301连接。在第三夹爪301沿第一方向朝基板101的外侧移动到第一预设位置时,第一限制件313朝向第三阻挡件312移动并被第三阻挡件312阻挡。
[0081]
第二止动组件306具有第四阻挡件314以及第二限制件315。第四阻挡件314设置在基板101上。第二限制件315和第四夹爪302连接。在第四夹爪302沿第一方向朝基板101的外侧移动到第二预设位置时,第二限制件315朝向第四阻挡件314移动并被第四阻挡件314阻挡。
[0082]
根据本实施方式的保持装置300,能够无需外部动力而保持在打开状态或者关闭状态。具体而言,由于第三弹性组件311以使第三夹爪301以及第四夹爪302分别沿第一方向朝基板101的内侧移动的方式,对第三夹爪301以及第四夹爪302施力,因此,能够无需外部动力而使第三夹爪301以及第四夹爪302保持夹持状态(关闭状态)。由此,能够夹持并保持电芯703。
[0083]
此外,由于在第三夹爪301移动到第一预设位置时,与第三夹爪301连接的第一限制件313被第三阻挡件312阻挡,并且第四夹爪302沿第一方向朝基板101的外侧移动到第二预设位置时,与第四夹爪302连接的第二限制件315被第四阻挡件314阻挡,因此,能够无需外部动力从而使第三夹爪301以及第四夹爪302分别保持在打开状态。由此,能够解除对电芯703的保持,从而实现可进行电芯703的上下料或者其他的工序(后述)。
[0084]
据此,本实施方式的保持装置300无需在载具100上额外增加用于驱动保持装置300的动力,而只需在例如流水线的预设的位置安装用于打开第三夹爪301以及第四夹爪302、第一止动组件305以及第二止动组件306的驱动装置(例如气缸、电机等)即可。
[0085]
第一预设位置以及第二预设位置的具体位置并不特别限定,只要是第三夹爪301以及第四夹爪302相对于夹持状态(关闭状态),沿第一方向而朝基板101的外侧移动的行程内的位置即可。第一预设位置以及第二预设位置可以根据电芯703所需要的上下料的空间而确定。此外,在对例如电芯703的极耳704进行整形的工序中,第一预设位置以及第二预设位置只要能够确保第三夹爪301以及第四夹爪302不和整形中的极耳704干涉即可。
[0086]
此外,基板101的“外侧”是指基板101的边缘区域或者基板101之外的部分,基板101的“内侧”则是指相对于基板101的外侧而言,处在基板101的中间区域(例如左右方向的中间区域)的部分。
[0087]
本实施方式的保持装置300可以直接安装在基板101上。例如,第三导向组件303的第三导向件307以及第四导向组件304的第四导向件309可以直接安装在基板101上。第三导向组件303只要能够对第三夹爪301,以及第四导向组件304只要能够对第四夹爪302进行直线引导,其结构并不特别限定。此外,第三导向组件303和第四导向组件304的结构大致相同,下面主要以第三导向组件303为例进行说明,仅在需要的情况下说明第四导向组件304。
[0088]
例如,第三导向组件303可以选择市售的线性滑轨组件,即:使用线性滑轨作为第三导向件307。此外,线性滑轨组件还包括例如滑块,该滑块则作为第四安装件308而使用。通过分别使用线性滑轨组件作为第三导向组件303以及第四导向组件304,能够提高第三导向组件303以及第四导向组件304的滑动顺畅度,防止第三夹爪301或者第四夹爪302打开(相互远离)或者关闭(相互靠近)的时候卡滞。
[0089]
此外,第三导向件307和第四导向件309可以一体成型。即,可以仅使用一根沿基板101的左右方向延伸的线性滑轨,线性滑轨上分别搭载有两个滑块,并将其中一个滑块作为第四安装件308,将另一个滑块作为第五安装件310。
[0090]
继续参照图5至图8,第三夹爪301和第四夹爪302只要能够保持电芯703,其结构并不特别限定,例如,第三夹爪301和第四夹爪302可以分别大致呈平板状。第三夹爪301可以直接安装在作为第四安装件308的滑块上。此外,为了方便第三夹爪301和其他的部件(例如后述的第二驱动件320、第三弹性组件311以及第一止动组件305等)连接,第四安装件308上可以安装有第一安装座316。第三夹爪301可以沿第一方向可调节地安装到第一安装座316上。为了便于调节第三夹爪301,可以在第一安装座316上安装第一参考尺317。同样地,作为第五安装件310的滑块上也可以安装有第二安装座318,第四夹爪302可以沿第一方向可调节地安装到第二安装座318上。为了便于调节第四夹爪302,可以在第二安装座318上安装第二参考尺319。通过将第三夹爪301和第四夹爪302分别设置成沿第一方向可调节,能够根据电芯703的类型,而容易地调整第三夹爪301和第四夹爪302的初始位置。此外,通过设置第一参考尺317以及第二参考尺319,则能够提高第三夹爪301以及第四夹爪302的调节精度。
[0091]
在一些实施例中,为了使第三夹爪301以及第四夹爪302容易地被外设的驱动装置(例如气缸、电机)驱动。本实施方式的保持装置300还可以包括:第二驱动件320和第三驱动件321。其中,第二驱动件320的一端和第三夹爪301连接。第二驱动件320的另一端沿第一方向朝基板101的外侧延伸。具体地,第二驱动件320例如大致呈l字状,第二驱动件320的远端设置有钩部322。第二驱动件320的一端连接到第一安装座316,第二驱动件320的设置有钩部322的远端呈悬臂状,并可以沿第一方向延伸到基板101之外。由此,外设的驱动装置可以通过直接钩住第二驱动件320的钩部322,并沿第一方向以使第三夹爪301沿基板101的外侧移动的方式拉动第二驱动件320,从而容易地驱动第三夹爪301。同样地,第三驱动件321的一端和第四夹爪302连接,第三驱动件321的另一端也沿第一方向朝基板101的外侧延伸。第三驱动件321和第二驱动件320的结构、连接方式等大致相同,在此不详细展开说明。
[0092]
继续参照图6、图8,并辅助参照图5、图7,如上所述,第三弹性组件311设置为以使第三夹爪301以及第四夹爪302分别沿第一方向朝电芯保持部102移动的方式,对第三夹爪301以及第四夹爪302施力。在一些实施例中,第三弹性组件311可以包括:第三弹性件323和第四弹性件324。第三弹性件323可以设置在基板101的第一方向的一侧,并以使第三夹爪301沿第一方向朝向基板101的内侧移动的方式对第三夹爪301施力。第四弹性件324可以设
置在基板101的第一方向的另一侧,并以使第四夹爪302沿第一方向朝向基板101的内侧移动的方式对第四夹爪302施力。第三弹性件323和第四弹性件324的结构大致相同,在此仅以第三弹性件323为例进行说明,仅在必要的情况下提及第四弹性件324。
[0093]
具体而言,第三弹性件323例如可以选择压缩弹簧。基板101上可以设置弹簧座325,第三弹性件323的一端抵接弹簧座325,第三弹性件323的另一端抵接连接到第一安装座316的弹簧安装柱326上。由此,第三弹性件323能够沿左方向推动弹簧安装柱326,从而使第三夹爪301经由第一安装座316以及弹簧安装柱326从而沿左方向移动并保持(即保持在关闭状态)。
[0094]
由此,在没有受到驱动装置的外力的情况下,第三弹性件323和第四弹性件324分别保持在初始状态(在该状态下具有一定的压缩力),在该初始状态下,第三弹性件323使第三夹爪301保持在关闭状态,第四弹性件324也使第四夹爪302保持在关闭状态。
[0095]
此外,上面虽然以第三弹性组件311具有第三弹性件323和第四弹性件324为例进行了说明,但是并不限于此。在其他实施例中,第三弹性组件311也可以包括拉簧(未图示),拉簧的两端分别拉住第一安装座316和第二安装座318,从而能够使在没有来自外部的动力的情况下,第三夹爪301和第四夹爪302保持在关闭状态(即可夹持的状态)。
[0096]
以下对第一止动组件305进行详细说明。此外,第二止动组件306的结构和第一止动组件305的结构大致相同,在此主要以第一止动组件305为例进行说明,必要的情况下提及第二止动组件306。
[0097]
继续参照图5,并辅助参照图6、图7,如上所述,第一止动组件305具有:第三阻挡件312以及第一限制件313。第三阻挡件312设置在基板101上。第一限制件313和第三夹爪301连接。在第三夹爪301沿第一方向朝基板101的外侧移动到第一预设位置时,第一限制件313沿朝向第三阻挡件312的方向移动(附图中为下方向)并被第三阻挡件312阻挡。具体而言,例如,第三阻挡件312可以呈平板状。基板101的右侧开设有安装槽327,第三阻挡件312容置在安装槽327内。第三阻挡件312设置有第一表面部328,第一表面部328呈平面状,在容置于安装槽327的情况下,第一表面部328可以和基板101的上表面平齐,并且,第一表面部328沿上下方向和第一限制件313相对。第一限制件313沿垂直于第一表面部328的方向(附图中为上下方向)可移动。在第三夹爪301处在关闭位置时,第一限制件313的下端部直接抵接第三阻挡件312的第一表面部328,并沿第一表面部328移动。当第三夹爪301被外设的驱动装置沿第一方向朝基板101的外侧移动时,第一限制件313也随着第三夹爪301而朝第三阻挡件312的外侧移动。当第三夹爪301移动到第一预设位置时,第一限制件313从第三阻挡件312的第一表面部328脱落并朝下滑动,从而第一限制件313的下端部抵接第三阻挡件312的右侧面。由此,第三夹爪301沿第一方向朝基板101的内侧的移动被限制,第三夹爪301保持在打开状态。
[0098]
第一限制件313例如可以通过外设的驱动装置驱动从而沿上下方向移动。当第一限制件313被驱动而相对第三阻挡件312沿上方向移动时,第一限制件313的下端部脱离第三阻挡件312的右侧面,第三夹爪301被解除限制,并且通过第三弹性件323的驱动,从而沿第一方向朝基板101的内侧移动。由此,第三夹爪301切换到关闭状态并保持在关闭状态。
[0099]
据此,在本实施方式的保持装置300中,通过上述的第一止动组件305,能够容易地使第三夹爪301保持在打开状态,并且能够容易地被解除打开状态并切换到关闭状态。
[0100]
此外,上面虽然以将呈平板状的第三阻挡件312安装于基板101为例进行了说明,但是并不限于此。例如,也可以直接将基板101本身作为第三阻挡件312,并将基板101的上表面作为第一表面部328。
[0101]
此外,上面虽然以第一限制件313沿正交于第一方向的第二方向(上下方向)为例进行了说明,但是并不限于此。第一限制件313只要能够被第三阻挡件312阻挡,从而使第三夹爪301的移动被限制,其移动方向并不特别限定,例如,第一限制件313可以沿分别正交于第一方向以及第二方向的第三方向(附图中为前后方向)移动,或者相对于这些方向呈一定的角度地移动。
[0102]
在一些实施例中,为了容易地安装第一止动组件305,第一止动组件305还可以包括第二基座329,第二基座329搭载到第四安装件308,第一限制件313沿与第一方向正交的第二方向(附图中为上下方向),相对第二基座329可滑动。此外,第二基座329上可以安装有例如第一导向衬套330,与此对应,第一限制件313例如呈轴状。由此,第一限制件313能够在第一导向衬套330内顺畅地活动。
[0103]
在一些实施例中,为了使第一限制件313能够容易地沿第一导向衬套330滑动,第一止动组件305还可以包括第五弹性件331,第五弹性件331沿第一限制件313朝向第三阻挡件312的方向对第一限制件313施力。具体而言,例如,第五弹性件331可以选择压缩弹簧。压缩弹簧套在第一限制件313的外周。压缩弹簧的一端抵接第二基座329(也可以直接抵接第二驱动件320或者第一导向衬套330),压缩弹簧的另一端抵接第一限制件313。由此,在第三夹爪301沿第一方向朝基板101的外侧移动到第一预设位置时,第一限制件313被第五弹性件331驱动,从而朝向第三阻挡件312移动并被第三阻挡件312阻挡。
[0104]
在一些实施例中,为了降低第一限制件313相对第三阻挡件312的第一表面部328滑动时候的摩擦力,从而减少第三阻挡件312的磨损等,第一限制件313的一端可以设置有第三滚动件332,在第三夹爪301沿第一方向朝向基板101的内侧移动时,第三滚动件332沿第三阻挡件312的第一表面部328滚动。具体而言,第一止动组件305可以包括两个第一限制件313。此外,第一止动组件305还包括滚动件安装座333,滚动件安装座333连接到两个第一限制件313的下端部,第三滚动件332则可转动地安装到滚动件安装座333。
[0105]
由此,当第三滚动件332被驱动而相对第三阻挡件312沿上方向移动时,第三滚动件332脱离第三阻挡件312的右侧面,第三夹爪301被解除限制,并且通过第三弹性件323的驱动,从而沿第一方向朝基板101的内侧移动。在第三夹爪301朝基板101的内侧移动的同时,第三滚动件332也沿着第三阻挡件312的第一表面部328滚动。由此,能够大大地减少第三阻挡件312的磨损等。
[0106]
和第一止动组件305大致相同,第二止动组件306可以包括第三基座334,第三基座334搭载到第五安装件310,第二限制件315沿第二方向相对第三基座334可滑动。进一步地,在一些实施例中,第二止动组件306可以包括第六弹性件335,第六弹性件335沿第二限制件315朝向第四阻挡件314的方向对第二限制件315施力。更进一步地,在一些实施例中,第二限制件315的一端设置有第四滚动件336。第四阻挡件314设置有第二表面部337,第二表面部337沿上下方向和第二限制件315相对,第二表面部337呈平面状。在第四夹爪302沿左右方向朝向基板101的内侧移动时,第四滚动件336在第二表面部337滚动。
[0107]
第二止动组件306的其他部分等均参照第一止动组件305对应的部件进行设置即
可,在此不详细展开说明。
[0108]
以下以对保持装置300的工作过程进行说明。具体而言,本实施方式的保持装置300可以夹持呈长方体形状的电芯703。极耳704分别设置在电芯703的长度方向的两侧(附图中为左右两侧)。此外,极耳连接片702设置在顶盖701的长度方向的两端(附图中为左右两侧)。极耳连接片702和极耳704通过激光进行焊接。
[0109]
极耳连接片702和极耳704通过激光焊接之前的工艺大致包括顶盖安装工序、极耳整形工序以及极耳保持工序。
[0110]
在顶盖安装工序中,首先,在将顶盖701相对于电芯703进行安装之前,极耳704相对于电芯703的主体,沿第一方向朝电芯703的主体的外侧延伸。在顶盖安装工序中,顶盖701被夹持装置200夹持。将顶盖701安装到电芯703的前端后,位于顶盖701的长度方向的一端的极耳连接片702贴合到电芯703的主体的长度方向的一侧,位于顶盖701的长度方向的另一端的极耳连接片702则贴合到电芯703的主体的长度方向的另一侧。
[0111]
在极耳整形工序中,通过极耳整形装置(未图示)分别将电芯703的长度方向的两侧的极耳704朝向与其相对的极耳连接片702进行翻折,并覆盖与其相对的极耳连接片702。
[0112]
在极耳保持工序中,通过上面各实施例的保持装置300夹持极耳704,以使极耳704和极耳连接片702保持贴合的状态。
[0113]
之后,对极耳704进行焊接以将极耳704和极耳连接片702相互固定。
[0114]
根据本实施方式的保持装置300,能够用于使极耳704和极耳连接片702保持贴合的状态。具体而言,在第三夹爪301被外设的驱动装置驱动到第一预设位置、以及第四夹爪302被外设的驱动装置驱动到第二预设位置时,第一止动组件305以及第二止动组件306分别限制第三夹爪301以及第四夹爪302,从而即使外设的驱动动力撤销,第三夹爪301和第四夹爪302也稳定地保持在打开的状态,在此状态下,可以进行例如顶盖安装工序以及极耳整形工序等。
[0115]
在完成顶盖安装工序以及极耳整形工序之后,外设的驱动装置可以分别驱动第一限制件313从而使其相对于第三阻挡件312而沿反方向(附图中为上方向)移动,并且驱动第二限制件315从而使其相对于第四阻挡件314而沿反方向(附图中为上方向)移动。由此,第一止动组件305以及第二止动组件306分别解除对第三夹爪301以及第四夹爪302的限制,在第三弹性组件311的驱动下,第三夹爪301以及第四夹爪302分别沿第一方向朝基板101的内侧移动并分别夹持位于电芯703的长度方向的两侧的极耳704,并且,通过第三弹性组件311,第三夹爪301以及第四夹爪302保持对极耳704的夹持状态。
[0116]
由此,上面各实施例的保持装置300,能够无需外部动力而保持在打开状态或者关闭状态,因此能够可靠地保持电芯703的被整形后的两个极耳704。
[0117]
继续参照图5、图7以及图8,在一些实施例中,为了便于例如激光器对极耳704进行焊接,第三夹爪301上可以开设有第一槽部338,第一槽部338使电芯703的长度方向的一侧的极耳704的部分露出。第四夹爪302上也可以开设有第二槽部339,第二槽部339使电芯703的长度方向的另一侧的极耳704的部分露出。第一槽部338以及第二槽部339的形状并不特别限定,只要能够避让激光焊接的焊接轨迹即可。
[0118]
通过在载具100中使用上面各实施例的保持装置300,在电芯上料工序、顶盖安装工序以及极耳整形工序中,第三夹爪301以及第四夹爪302保持在打开状态,从而能够方便
地进行电芯上料工序、顶盖安装工序以及极耳整形工序。在极耳保持工序以及极耳焊接工序中,则通过外设的驱动装置对第一止动组件305以及第二止动组件306进行解锁,第三夹爪301以及第四夹爪302通过第三弹性组件311,自动地切换到关闭状态并保持在关闭状态,从而夹持电芯703。
[0119]
[隔板组件400]
[0120]
图9是隔板组件400的一种实施例的后视方向的示意图。图10是隔板组件400的要部的示意图。图11是隔板组件400的爆炸图。参照图9至图11,根据本实施方式的隔板组件400,包括:第四基座401、隔板402、第一支撑板403以及第二支撑板404。
[0121]
其中,隔板402用于将沿厚度方向(附图中为上下方向)叠装的电芯703隔开。隔板402的长度方向(附图中为左右方向)的长度大于电芯703的长度方向(附图中为左右方向)的长度。隔板402的宽度方向(附图中为前后方向)的一端的第一端部405被固定到第四基座401。隔板402的宽度方向的另一端的第二端部406呈悬臂状并朝远离第四基座401的方向(附图中为前向)延伸。第一支撑板403设置在隔板402的长度方向的一侧并和第二端部406连接。第二支撑板404设置在隔板402的长度方向的另一侧并和第二端部406连接。第一支撑板403和第二支撑板404分别至少沿隔板402的厚度方向的一侧突出。在隔板402处在叠装的两个电芯703之间的情况下,第一支撑板403至少和设置在一个电芯703的长度方向的一侧的极耳704相对,第二支撑板404至少和设置在电芯703的长度方向的另一侧的极耳704相对。
[0122]
根据本实施方式的隔板组件400,不仅能够将沿上下方向叠装的电芯703隔开,而且能够沿左右方向支撑电芯703的极耳704从而辅助其焊接。具体而言,通过设置一端被固定到第四基座401、另一端呈悬臂状的隔板402,能够在电芯703叠装的过程中将电芯703沿上下方向隔开,从而防止电芯703挤压。而通过使隔板402的长度方向的长度大于电芯703的长度方向的长度,并分别在隔板402的长度方向的两侧设置第一支撑板403以及第二支撑板404,并使第一支撑板403以及第二支撑板404分别至少沿隔板402的厚度方向的一侧突出。由此,在极耳704包裹住极耳连接片702并需要进行焊接的情况下,能够使第一支撑板403和第二支撑板404分别插入到极耳704(极耳连接片702)和电芯703的主体的长度方向的一侧之间,从而能够在焊接的时候支撑极耳704(极耳连接片702)。由此,能够确保焊接极耳704时,极耳704的基准位置始终保持一致,从而保证极耳704的焊接质量。
[0123]
隔板402例如呈薄板状,隔板402的厚度并不特别限定,根据现有的隔板组件400的厚度进行设置即可。第四基座401呈块状,隔板402的第一端部405被固定到第四基座401,从而提高隔板402的强度,并进而提高第一支撑板403以及第二支撑板404的支撑强度。隔板402既可以通过例如:螺丝锁紧、夹板夹紧等公知的固定方式固定到第四基座401。此外,隔板402也可以直接和第四基座401一体成型。
[0124]
第一支撑板403以及第二支撑板404的设置在隔板402的第一端部405的部分例如分别呈薄板状。只要能够涵盖极耳704的焊接区域,第一支撑板403以及第二支撑板404沿隔板402的厚度方向突出的高度并不特别限定,例如,可以略小于电芯703的主体的厚度。
[0125]
继续参照图11,以两个电芯703沿厚度方向(附图中为上下方向)叠装的例子进行说明。在一些实施例中,在两个电芯703的长度方向的一侧的极耳704分别和极耳连接片702焊接的情况下,第一支撑板403和第二支撑板404可以分别沿隔板402的厚度方向的两侧突
出,在隔板402处在叠装的两个电芯703之间的情况下,第一支撑板403分别和相互叠装的电芯703的长度方向的一侧的极耳704相对,第二支撑板404分别和相互堆叠的电芯703的长度方向的另一侧的极耳704相对。即,在本实施例中,第一支撑板403的上下方向的中部和隔板402的第二端部406连接。同样地,第二支撑板404的上下方向的中部也和第二端部406连接。由此,能够实现通过一个第一支撑板403以及一个第二支撑板404涵盖相互叠装的两块电芯703的极耳704。
[0126]
此外,在其他实施例中,例如为了适应不同的极耳焊接工艺等,第一支撑板403以及第二支撑板404可以根据需要,分别仅朝隔板402的上侧突出,或者分别仅朝隔板402的下侧突出,或者,也可以是第一支撑板403以及第二支撑板404的一个朝隔板402的上侧突出,第一支撑板403以及第二支撑板404的另一个朝下侧突出。
[0127]
继续参照图9、图10,在一些实施例中,为了提高隔板组件400整体的支撑强度,第一支撑板403的长度方向(附图中为前后方向)的一端和第四基座401连接,第一支撑板403的长度方向的另一端和隔板402的第二端部406连接。具体而言,第一支撑板403的长度涵盖隔板402的宽度(附图中为前后方向)以及第四基座401的至少部分。第一支撑板403从第四基座401开始,朝隔板402的第二端部406延伸,并分别和第四基座401以及隔板402相互连接。由此,不仅能够提高第一支撑板403的支撑强度,也能够有效地提高隔板组件400整体的支撑强度。同样地,第二支撑板404的长度方向的一端也可以和第四基座401连接,第二支撑板404的长度方向的另一端也可以和隔板402的第二端部406连接。由此,能够提高第二支撑板404的支撑强度,并提高隔板组件400整体的支撑强度。进一步地,还能够使隔板组件400的整体的支撑更加平衡。
[0128]
此外,在其他实施例中,例如为了适应不同的电芯703结构或者不同的载具100结构,第一支撑板403和第二支撑板404中,也可以是其中一个的长度方向的一端和第四基座401连接,长度方向的另一端和第二端部406连接,而另一个则仅连接在隔板402的第二端部406的位置。
[0129]
继续参照图11并辅助参照图9、图10,在一些实施例中,为了降低各部件的加工难度,降低加工成本,第一支撑板403分别和第四基座401以及隔板402可拆卸地连接。具体而言,例如,第一支撑板403可以通过螺丝锁紧、卡扣卡紧、夹爪夹紧等各种公知的可拆卸的连接方式,分别和第四基座401以及隔板402连接。通过使第一支撑板403、第四基座401以及隔板402相互之间可拆卸地连接,能够分别将这些部件加工成大致的规则状,从而降低各部件的加工难度,降低加工成本。并且,也能够根据需要进行其他的工艺处理,例如,可以对隔板402进行抛光处理,提高其表面粗糙度,从而降低隔板402和电芯703之间的摩擦。此外,可以对第一支撑板403进行淬火处理,从而提高其表面硬度等。同样地,第二支撑板404也可以如第一支撑板403地分别和第四基座401以及隔板402可拆卸地连接。
[0130]
此外,在其他实施例中,例如为了适应不同的部件的加工要求等,也可以是第一支撑板403和第二支撑板404中的其中一个和第四基座401以及隔板402可拆卸地连接,第一支撑板403和第二支撑板404中的另外一个则和第四基座401以及隔板402一体成型等。
[0131]
继续参照图9、图10,在一些实施例中,在第一支撑板403相对隔板402可拆卸地连接的情况下,为了进一步提高第一支撑板403的支撑强度,第一支撑板403可以在和隔板402相对的一面,设置有第一加强筋407(参照图10,由于被遮住,因此在此以虚线表示),第一加
强筋407抵接隔板402。具体而言,第一支撑板403和第一加强筋407整体形成为例如t形状,第一加强筋407设置在第一支撑板403的宽度方向(上下方向)的中部,并沿第一支撑板403的长度方向延伸。第一加强筋407的厚度和隔板402的厚度大致相同,由此,第一支撑板403能够以其第一加强筋407和隔板402沿上下方向大致平齐的状态下,可拆卸地和隔板402连接。同样地,第二支撑板404也可以如第一支撑板403地,在和隔板402相对的一面,设置有第二加强筋408,第二加强筋408抵接隔板402。
[0132]
继续参照图11,并辅助参照图9、图10,在一些实施例中,隔板组件400还可以包括第五基座409,第四基座401沿隔板402的长度方向可浮动地安装到第五基座409。具体而言,由于隔板402、第一支撑板403以及第二支撑板404分别相对于第四基座401呈悬臂状,在电芯703的极耳704(顶盖的极耳连接片702)一起被按压的时候,隔板402、第一支撑板403以及第二支撑板404的悬臂端整体承受压力。在第一支撑板403以及第二支撑板404的被按压的位置相对其被安装的位置由于装配等原因沿左右方向产生偏差的情况下,可能会导致第一支撑板403以及第二支撑板404的悬臂部分被弯折。在此情况下,通过将用于安装:隔板402、第一支撑板403以及第二支撑板404的第四基座401设置为沿隔板402的长度方向(即被按压的方向)可浮动,能够使第四基座401、隔板402、第一支撑板403以及第二支撑板404整体根据电芯703的极耳704被例如焊接装置按压的位置而自适应地调节。由此,能够防止第一支撑板403以及第二支撑板404发生弯折的变形。
[0133]
作为使第四基座401沿隔板402的长度可浮动的具体实施例,例如,隔板组件400还可以包括第五导向组件410,第五导向组件410具有:第五导向件411和第六安装件412。其中,第五导向件411沿隔板402的长度方向(左右方向)延伸。第六安装件412可沿第五导向件411移动。第五导向件411和第六安装件412中的其中一个,安装到第五基座409。第五导向件411和第六安装件412中的另外一个支撑第四基座401。具体而言,作为第五导向组件410,例如可以选择线性滑轨组件,将线性滑轨作为第五导向件411,将滑块作为第六安装件412。作为第五导向件411的线性滑轨,例如安装到第五基座409。第四基座401则安装到第六安装件412并被第六安装件412支撑。由此,第四基座401能够相对于第五基座409,沿隔板402的长度方向可浮动。
[0134]
为了使第四基座401在初始状态下,沿隔板402的长度方向可保持在预设的位置,在一些实施例中,隔板组件400还可以包括第四弹性组件413,第四弹性组件413沿第四基座401浮动的方向对第四基座401施力。具体而言,例如第四弹性组件413可以包括两个,两个第四弹性组件413沿第四基座401的浮动的方向,分别设置在第四基座401的两侧。第四弹性组件413可以选择例如弹簧、油压缓冲器等公知的弹性装置,第四弹性组件413例如可以分别安装在第五基座409的长度方向的两侧,并分别沿第五基座409的长度方向,对第四基座401施力。通过设置两个第四弹性组件413,能够实现即使第四基座401、隔板402、第一支撑板403以及第二支撑板404随着被按压而稍微自适应地调节的同时,在来自例如焊接装置的外力撤去之后,第四基座401、隔板402、第一支撑板403以及第二支撑板404能够复位到初始位置,从而能够确保在隔板402处在叠装的两块电芯703之间时,第一支撑板403以及第二支撑板404能够分别位于电芯703的长度方向的两侧,防止第一支撑板403以及第二支撑板404和电芯703或者极耳704干涉。
[0135]
以下以对隔板组件400的工作过程进行说明。在需要对多个电芯703进行叠装之后
再和顶盖701焊接的动力电池的生产过程中,极耳连接片702和极耳704通过激光焊接之前的工艺大致包括电芯上料工序、隔板插入工序、顶盖安装工序、极耳整形工序以及极耳保持工序等。
[0136]
在电芯上料工序中,首先通过例如机器人等将电芯703上料至电芯保持部102。
[0137]
在电芯703上料到电芯保持部102之后,隔板组件400可以被外设的驱动装置驱动,从而沿第六导向组件414滑动,并且,隔板402处在被上料的第一块电芯703的上方。在隔板402处在第一块电芯703的上方的状态下,第一支撑板403以及第二支撑件分别位于电芯703的长度方向的两侧。
[0138]
在顶盖安装工序中,首先,在将顶盖相对于电芯703进行安装之前,极耳704相对于电芯703的主体,沿第一方向朝电芯703的主体的外侧延伸。在顶盖安装工序中,夹持装置200将顶盖安装到电芯703的前端后,位于顶盖的长度方向的一端的极耳连接片702贴合到第一支撑板403以及第二支撑板404的其中一个的外侧,位于顶盖的长度方向的另一端的极耳连接片702则贴合到电芯703的主体的宽度方向第一支撑板403以及第二支撑板404的另一个的外侧。
[0139]
在顶盖安装工序之后,上料另一块电芯703。此时,隔板402处在叠装的两块电芯703之间。
[0140]
在极耳整形工序中,通过极耳整形装置(未图示)分别将叠装的两块电芯703的宽度方向的两侧的极耳704朝向与其相对的极耳连接片702进行翻折,并覆盖与其相对的极耳连接片702。
[0141]
在极耳保持工序中,通过保持装置300夹持极耳704,以使极耳704和极耳连接片702保持贴合的状态。在极耳704和极耳连接片702保持贴合的状态下,极耳704以及极耳连接片702整体,分别被第一支撑板403以及第二支撑板404支撑。
[0142]
之后,对极耳704进行焊接以将极耳704和极耳连接片702相互固定。
[0143]
根据本实施方式的载具100,由于设置有上述各实施例的隔板组件400,在对例如设置在电芯的长度方向的两侧的极耳和设置在顶盖的长度方向的两侧的极耳连接片702进行焊接时,能够支撑极耳704(极耳连接片702),确保焊接极耳704时,极耳704的基准位置始终保持一致,从而保证极耳704的焊接质量。
[0144]
据此,根据本实施方式的载具100,能够无需外部动力而使设置在电芯的长度方向的两侧的极耳以及设置在顶盖的长度方向的两侧的极耳连接片702保持在相互稳定、且可靠的接触状态,从而能够应用在例如流水线上并进行极耳激光焊接。
[0145]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实施方式的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0146]
尽管已经示出和描述了本实施方式的实施例,本领域的普通技术人员可以理解:在不脱离本实施方式的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实施方式的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1