超高强度钢随焊超声辅助激光焊接系统及方法
1.本发明属于航天结构件高效激光焊接制造技术领域,具体涉及一种超高强度钢随焊超声辅助激光焊接系统及方法。
背景技术:
2.超高强度钢一般是指室温抗拉强度超过1400mpa,屈服强度大于1200mpa的钢,主要用于火箭发动机壳体、发动机喷管和各级助推器。30cr3钢是由我国相关单位在总结国内外超高强度钢的基础上,自主研制的一种马氏体低合金超高强度钢,它以强度高、韧性好、综合性能优良等特点被应用于制造固体火箭动力舱段壳体。
3.由于30cr3钢含碳量较高、合金元素较多,淬硬倾向大,在焊接时容易出现冷裂纹以及热影响区软化和脆化问题。目前针对30cr3超高强度钢,国内焊接试验报导较少,仅涉及真空电子束焊接和钨极氩弧焊焊接。但随着发动机尺寸的增大,真空电子束焊接将受到真空室尺寸的限制,且工艺流程复杂,不利于大规模的生产应用。而钨极氩弧焊由于焊接效率较低、电弧能量发散、热影响区宽将带来生产周期延长、焊接变形大的问题。
4.激光焊接是利用能量密度极高的激光束作为焊接热源的一种高效精密焊接方法。其具有能量密度高、焊接速度快、深宽比大、热影响区小、焊接变形小等诸多优点,且易于实现自动化、工程化应用,已在航空航天、电子、汽车制造、核动力等领域得到了广泛应用。相比于真空电子束焊接,激光焊接能摆脱真空室尺寸的限制,在大气环境下即可实现高效优质焊接。因此将激光焊接应用于制造30cr3钢固体火箭发动机壳体,能够显著降低成本、提高生产效率。然而由于激光焊接升温和冷却速度快,焊缝凝固时温度梯度较大,导致晶粒粗大、元素分布不均匀,合金元素易形成低熔点共晶偏析于晶界,增大了产生热裂纹的倾向,这在一定程度上影响焊接接头的机械性能。此外,30cr3钢中合金元素含量较高,在焊接过程中极易与空气中的氧、氮等形成氧化物、氮化物,这些杂质被卷入熔体中不易排出形成夹渣。当激光焊接工艺参数选择不当,会使焊接过程变得不稳定,焊接接头容易出现气孔、咬边等缺陷,难以满足航天精密制造领域的实际应用要求。
5.目前国内外通过物理场来改善金属凝固组织、减少内部缺陷、提高力学性能的方法主要有电流、磁场和超声波处理等手段,这些方法最先应用于传统的铸造领域,逐渐发展到焊接等金属熔化凝固领域。超声辅助是近年来在焊接领域里出现改善焊接结构性能的一种新技术。超声波的高频振动能场作用于焊接熔池,能够产生空化效应、声流效应以及机械效应,对熔池的凝固结晶过程产生显著影响,从而对上述缺陷起到一定的抑制作用。超声波的空化效应在熔池中产生的空化气泡崩溃时,会对凝固界面前沿正在生长的枝晶起到破碎作用,增加了异质形核质点,促进焊缝凝固组织由粗大树枝晶向细小等轴晶转变。超声波的声流效应促进了熔池内液态金属的层间流动,可明显提高温度场和元素分布的均匀性,且有利于气泡和夹杂的上浮逸出。超声场在熔池中引起的质点高频微振会产生附加热效应,延长了熔池边沿液态金属的凝固时间,有利于熔池金属向焊缝边沿铺展,最终获得成形均匀的焊缝。此外,熔池附近的高温区域由于屈服强度降低,在随焊超声冲击作用下易于发生
压缩塑性变形,并与焊接热循环过程中产生的拉伸塑性变形叠加,起到减小焊接残余应力和变形的作用,进而提高接头的疲劳性能。
6.发明专利cn101690991a公开了一种超声波辅助真空电子束焊接方法,为解决铝及铝合金尤其是铸造铝合金在真空电子束焊接过程中易产生气孔、冷隔等空腔型缺陷的技术难题,提出在真空电子束焊接过程中施加一定频率和振幅的超声波能量。然而该方法采用的是固定点的超声施加方式,在焊接过程中超声作用位置与热源之间的距离连续发生变化,使作用于液态熔池的超声能量分布不均匀。当焊接材料尺寸较大时,作用于整条焊缝的有效超声功率较低。
7.发明专利cn102059453a公开了一种非接触式超声辅助激光焊接的方法,为解决激光焊接钛合金、铝合金等金属中容易产生气孔、热裂纹、接头软化等问题,通过在熔池内引入超声波的方式抑制上述缺陷。该方法采用的非接触式超声施加方式在焊接过程中超声工具头不与工件发生接触,便于实现全方位自动化柔性焊接。然而该方法的超声在传入焊接区域前需在空气或保护气氛中传播一定距离,并在工件表面处发生显著的反射能量损失,使得超声有效作用效果较弱。因超声波传播的衰减效应,该方法要求超声振动头与熔池之间的距离较近,对于钛、铝等高反射率金属,激光热源反射的能量会对超声振动头产生一定损伤。
8.发明专利cn111545902a公开了一种随动超声波竖向辅助激光摆动焊接装置,通过使激光摆动与超声波引起的竖向振动相耦合,实现激光光束的三维轨迹运动,增大对熔池的搅拌作用,抑制铝合金激光焊接中气孔和裂纹等缺陷的产生。该装置采用固定架将四个超声发生装置沿激光头的周向均匀固定,超声发生装置能够带动激光头进行竖向振动并向激光头下方的熔池传送超声。但该装置引入的超声头数量较多,对原有的激光焊接装置改动较大,且配备的超声变幅杆振动幅度较高,长时间工作时会对激光头的整体精度带来不良影响。由于激光头与超声发生装置机械连接,当变化激光的离焦量时,为保证超声的作用效果需手动调节每个超声头的装夹高度,操作较为繁琐。此外该装置采用非接触式的超声施加方式,也会存在超声有效作用效果较弱的问题。
9.发明专利cn105364326a公开了一种镁合金激光-超声双面焊接的方法。针对镁合金激光焊接过程中易产生的氢气孔、热裂纹、晶粒粗化问题,提出了将超声波施加于焊缝背面并与激光束和焊缝在同一竖直平面内,通过激光束和超声变幅杆同步移动来完成焊接。具体实施例验证了该方法的有益效果。然而该方法要求位于正面的激光头和位于背面的超声变幅杆相对焊缝同步运动,设备组成及操作流程较为复杂。同时因超声变幅杆位于焊缝背部,该方法不适用于小直径筒体环形焊缝的焊接,也难以灵活运用于其他空间位置焊缝。
10.发明专利cn107570872a公开了一种超声振动辅助异质材料激光焊接的方法。为消除异质材料激光焊接过程中存在的未熔合区、二次相析出、元素不均匀分布等缺陷,提出了一种随动接触式超声辅助施加方式,其应用不受焊接尺寸的限制。然而该方法中超声振动头与工件表面的紧密接触是通过手动调节定位装置的下降距离实现的,且设计的下降距离在微米量级,调节精度要求高,调节难度大。当工件表面形貌存在一定起伏,这种刚性的下压接触量控制方式也不能做到及时响应,在焊接过程中难以保证超声振动头与工件的持续接触和超声的稳定输出。
11.经对现有技术文献检索分析,发现目前超声辅助激光焊接主要应用于铝、镁合金
及异种金属的焊接,且超声施加方式以非接触为主,超声引入位置也具有明显的差异性。针对航天用超高强度钢30cr3的焊接,目前仅涉及电子束焊接和钨极氩弧焊,并无随焊超声辅助激光焊接方法的报告及应用。动力舱段壳体是重要焊接组合件,在工作时不但要承受很大的纵向和横向过载,而且要承受高速气流的冲击和火药燃烧时高温高压的恶劣环境,这就对焊缝质量、力学性能、尺寸精度提出了很高的要求。因此为了实现航天用30cr3钢焊接的控形控性目标,提高生产质量和效率,亟需探索更为先进的焊接工艺和方法。
技术实现要素:
12.针对现有技术的不足和空白,本发明的目的是面向航天领域动力舱段壳体用超高强度钢提供一种随焊超声辅助激光焊接系统及方法。利用超声波在熔池中传播产生的一系列有益效应,改善熔池凝固结晶过程,起到细化晶粒、抑制气孔和裂纹等缺陷的作用。同时发挥激光焊接易于实现自动化、焊接效率高的优势,实现航天用超高强度钢的高效、高质量焊接。
13.为实现上述目的,本发明的目的是一种超高强度钢随焊超声辅助激光焊接系统,其特征在于,包括光纤激光焊接系统、超声发生系统以及plc控制系统,其中:
14.光纤激光焊接系统包括光纤激光电源、激光焊接头以及工业机器人;
15.光纤激光电源发射激光光束;
16.激光焊接头装配在工业机器人末端,通过连接夹具与超声发生系统相连,激光焊接头引导激光光束作用在平行于待焊试板的平面内往复扫描运动;
17.工业机器人控制激光焊接头和超声发生系统的运动;
18.超声发生系统包括超声变幅杆,超声变幅杆与激光焊接头的相对位置固定,超声变幅杆端部与焊接试板接触;
19.plc控制系统控制超声发生系统、工业机器人动作以及激光光束。
20.优选地,所述超声发生系统还包括超声电源、超声换能器、气缸、压缩空气生成装置及电磁阀,其中:
21.所述超声换能器将超声电源发出的电信号由超声换能器转化为超声频的机械振动,并通过超声变幅杆传递到焊接试板内;
22.气缸通过气体减压阀和电磁阀与压缩空气生成装置相连;
23.气缸持续为超声变幅杆提供压紧力;
24.气体减压阀改变进入气缸中的压缩空气的压力;
25.电磁阀与plc控制系统相连。
26.优选地,所述振荡扫描激光头配备循环水冷却装置,与光纤激光电源相连;振荡扫描激光头出光端配有压缩空气保护气刀。
27.优选地,所述连接夹具包括连接导轨和筒形固定夹具,其中:
28.所述筒形固定夹具用于夹持超声发生系统的超声换能器外壁;
29.所述连接导轨的一端通过螺栓与激光焊接头连接,另一端与筒形固定夹具转动连接。
30.根据本发明提供的一种基于上述的超高强度钢随焊超声辅助激光焊接系统的焊接方法,包括如下步骤:
31.步骤一:用砂纸打磨去除焊接试板表面的氧化膜,直至表面露出金属光泽,擦拭对接边及待焊面,去除表面油污;
32.步骤二:将处理后的焊接试板固定在焊接工装夹具上;
33.步骤三:调节激光焊接头位置及姿态,使激光束在工件表面聚焦,且焦点位于待焊位置;对焊接轨迹进行示教,调节连接夹具和旋转机构使超声振动头与焊接试板表面接触并与水平方向呈一定夹角,并使超声振动头偏置激光作用点一定距离;
34.步骤四:设置激光焊接参数、超声发生参数,开启与气缸相连的压缩空气并利用减压阀调节气体压力,开启激光焊接保护气;
35.步骤五:利用plc控制系统开启激光电源、超声电源,超声波发生器先产生超声波作用于焊接试板,3s后激光焊接头发出激光,同时工业机器人按预先示教的焊接轨迹行走开始焊接过程;
36.步骤六:工业机器人移动到焊接终止点位置,激光电源关闭,保持超声振动3s后关闭超声电源,依次关闭保护气、压缩空气。
37.优选地,所述步骤一中,采用30cr3试板,所述30cr3试板的厚度为2~4mm。
38.优选地,所述步骤三中:激光离焦量为-1~+1mm;调节激光与竖直方向的夹角为5
°
~10
°
;扫描频率为25hz~200hz,扫描速度为30mm/s~60mm/s,扫描幅度为0.5mm~3mm;焊接轨迹示教点包括初始位置点、焊接起始点和焊接终止点;定义连接夹具的x向平行于焊接方向,y向垂直于焊接方向,z向平行于待焊试板法向;超声振动头与水平方向的夹角为40
°
~60
°
,接触点相对于激光作用点x方向偏置0~20mm,y方向偏置0~30mm。
39.优选地,所述步骤四中:激光焊接功率为3400~4200w,焊接速度为0.8~1.4m/min,保护气种类为纯氩,保护气流量为20l/min。
40.优选地,所述步骤四中,超声发生参数包括超声频率和振幅增益,对应超声振动头振幅范围为1~2μm,气缸中压缩空气压力为0.2~0.4mpa。
41.优选地,所述优选频率为20khz,优选振幅增益范围为10%~20%。
42.与现有技术相比,本发明具有如下的有益效果:
43.1、本发明将超声波的高频振动能场作用于焊接熔池,利用其空化效应、声流效应以及机械效应,改善焊缝凝固结晶组织。在焊接过程中施加超声辅助,可以增强熔池液态金属层间流动,促进温度场和元素分布的均匀化以及气孔、夹杂的上浮逸出,并使焊缝组织晶粒细化。可有效抑制航天用超高强度钢焊接时容易出现的冷裂纹以及热影响区的软化和脆化问题,提高接头的综合性能,实现动力舱段壳体焊接的控形控性目标。同时本发明采用激光焊接方法,相比于该钢目前采用的焊接方法,具有能量密度高、焊接速度快、焊接变形小、热影响区窄、易于实现自动化、在大气环境下即可施焊不受真空室尺寸的限制等优势。
44.2、本发明采用随焊接触式超声施加方式,相比于非接触式或固定点接触超声施加方式,超声的能量利用率高,超声对于整条焊缝的作用效果更为均匀,可对大型焊接结构实施有效的超声干预。
45.3、本发明在不改变原有激光焊接系统下通过连接夹具引入超声辅助装置,且随焊超声施加于工件的正面,设备组成简单,便于实施和控制。
46.4、本发明中对激光焊接系统和超声发生系统的控制、气缸压缩空气的调节通过主控单元集成于机器人操作面板中,一体化程度高,操作方便。且由六轴机器人驱动,可实现
复杂轨迹和空间位置的焊接。
47.5、本发明中超声振动头的尾部加装气缸,通过调节进入气缸中压缩空气的气压,可以方便地控制超声振动头对试板表面的压紧力。在随动焊接过程中即使试板表面局部不平整也能保证振动头与试板表面的紧密接触,确保超声能量的有效施加。
附图说明
48.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显。
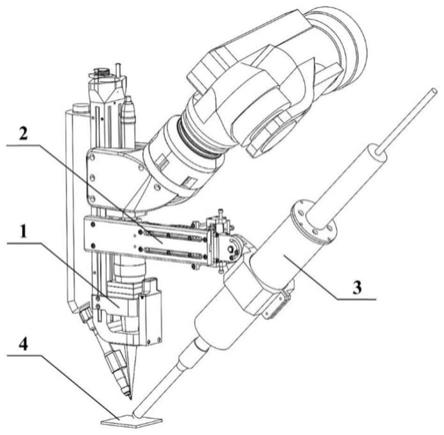
49.图1为本发明的一种航天用超高强度钢随焊超声辅助激光焊接系统及方法原理示意图;
50.图2为本发明连接夹具示意图;
51.图3为本发明超声发生装置示意图。
52.图中示出:1—激光焊接头,2—连接夹具,3—超声发生装置,4—焊接试板,5—筒形固定夹具,6—导轨槽,7—旋转机构,8—超声变幅杆,9—超声换能器,10—尾部气缸。
具体实施方式
53.为使本发明的目的、技术方案和优点更加清楚,下面结合附图对本发明的实施例作详细说明:本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程。下面所描述的实施例仅仅是本发明一部分实施例,而非全部的实施例。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
54.如图1至3所示,根据本发明提供的一种航天用超高强度钢随焊超声辅助激光焊接系统及方法,所述装置包括光纤激光焊接系统、超声发生系统、连接夹具三部分。其中光纤激光焊接系统包括光纤激光电源、激光焊接头、冷却装置、保护气装置、六轴工业机器人、参数设置终端。超声发生系统包括超声电源、超声换能器、超声变幅杆、气缸、压缩空气减压阀及电磁阀。
55.所述的激光焊接头装配在工业机器人第6轴的末端,通过特制的连接夹具与超声发生装置相连。超声变幅杆端部与焊接试板接触,焊接过程中保持与激光热源的相对位置不变,在机器人的带动下实现随焊超声辅助激光焊接过程。超声发生装置尾部的气缸与压缩空气发生装置相连,在焊接过程中持续为超声变幅杆提供压紧力,保证与焊接试板的紧密接触。超声换能器与超声电源相连,超声电源发出的电信号由超声换能器转化为超声频的机械振动,并通过超声变幅杆传递到焊接试板内。超声波电源、激光电源、机器人动作、超声发生器尾部气缸的开启和关闭操作利用plc主控装置集成于机器人操作面板中。
56.所述激光焊接头配备循环水冷却装置,与光纤激光电源相连,其出光端配有压缩空气保护气刀,防止焊接过程中产生的飞溅对激光光路产生损伤。
57.所述机器人为6个自由度的通用型工业机器人,可以带动激光头及超声辅助装置实现复杂轨迹及空间位置的焊接。
58.所述连接夹具一端通过螺栓与激光头相连,另一端通过筒形固定夹具与超声换能器的外壁相连。该装置可实现超声振动头在相对焊接试板x、y、z三个方向上偏置距离的调
节,也可实现超声振动头入射角度的调节。具有3个平移自由度和1个旋转自由度。为减轻结构整体重量,连接夹具的材质为铝合金。
59.所述超声发生装置中,为使结构轻量化并保证超声的有效施加,超声振动头采用的材质为钛合金,尾部气缸采用的材质为铝合金。为保证结构刚度,与连接夹具相接触的换能器外壁采用的材质为q235钢。
60.所述超声发生装置的尾部气缸通过气体减压阀和电磁阀与压缩空气生成装置相连。气体减压阀用于改变进入气缸中的压缩空气压力,进而实现超声振动头对试板表面压紧力的调节。电磁阀用于与plc主控装置相连,实现气缸开启和关闭的一体化控制。
61.本发明还提供一种航天用超高强度钢超声辅助激光焊接系统及方法,所述方法包括如下步骤:
62.步骤一:用砂轮机打磨去除待焊30cr3试板表面的氧化膜,直至表面露出金属光泽。用砂纸对试板表面进行二次打磨,消除砂轮机打磨产生的表面局部起伏,使试板表面光滑平整。用丙酮擦拭对接边及待焊面,去除表面油污。
63.步骤二:将处理后的待焊试板固定在焊接工装夹具上,对接间隙小于板厚的10%。
64.步骤三:调节激光头位置及姿态,使激光束在工件表面聚焦,且焦点位于待焊位置。利用机器人操作面板对焊接轨迹进行示教。调节连接夹具的z向位置和旋转机构使超声振动头与试板表面接触并与水平方向呈一定夹角,然后调节x、y向位置使超声振动头偏置激光作用点一定距离。
65.步骤四:设置激光焊接参数、超声发生参数,开启与气缸相连的压缩空气并利用减压阀调节气体压力。开启激光焊接保护气。
66.步骤五:利用机器人集成控制系统开启激光电源、超声电源,首先超声波发生器产生超声波作用于待焊试板,3s后激光器发出激光,同时机器人按预先示教的焊接轨迹行走开始焊接过程。
67.步骤六:机器人移动到焊接终止点位置,激光电源关闭,保持超声振动3s后关闭超声电源。依次关闭保护气、压缩空气,结束焊接过程。
68.所述步骤一中:所用30cr3试板的厚度为2~4mm。
69.所述步骤三中:激光离焦量为-1~+1mm。为防止试板表面的反射激光对激光器造成损伤,调节激光与竖直方向的夹角为5
°
~10
°
。焊接轨迹示教点包括初始位置点、焊接起始点和焊接终止点。定义连接夹具的x向平行于焊接方向,y向垂直于焊接方向,z向平行于待焊试板法向。超声振动头与水平方向的夹角为40
°
~60
°
,接触点相对于激光作用点x方向偏置0~20mm,y方向偏置0~30mm。
70.所述步骤四中:激光焊接功率为3400~4200w,焊接速度为0.8~1.4m/min,保护气种类为纯氩,保护气流量为20l/min。所述超声发生参数包括超声频率和振幅增益,优选频率为20khz,优选振幅增益范围为10%~20%,对应超声振动头振幅范围为1~2μm。气缸中压缩空气压力为0.2~0.4mpa。
71.更为详细的说明,根据本实施方式的一种航天用超高强度钢随焊超声辅助激光焊接方法,基于下述装置实现:
72.如图1所示的随焊超声辅助激光焊接装置,包括光纤激光焊接系统、超声发生系统、连接夹具三部分。激光焊接头1装配在工业机器人第6轴的末端,通过特制的连接夹具2
与超声发生装置3相连。超声变幅杆端部与焊接试板4接触,焊接过程中保持与激光热源的相对位置不变。在机器人的驱动下,通过激光束和超声变幅杆同步移动来完成焊接。
73.如图2所示的连接夹具,其一端通过螺栓与激光头相连,另一端通过筒形固定夹具5夹紧超声换能器的外壁。该夹具设计有导轨槽6,配合各方向上的紧固螺丝可实现超声振动头在相对焊接试板x、y、z三个方向上偏置距离的调节,通过旋转机构7也可实现超声振动头入射角度的调节。具有3个平移自由度和1个旋转自由度。定义连接夹具的x方向平行于焊接方向,y方向垂直于焊接方向,z向平行于待焊试板法向。
74.如图3所示的超声发生系统包括超声电源、一体化的超声变幅杆8、超声换能器9和尾部气缸10。超声换能器与超声电源相连,超声电源发出的电信号由超声换能器转化为超声频的机械振动,并通过超声变幅杆传递到焊接试板内。超声发生装置尾部的气缸通过减压阀与压缩空气发生装置相连,在焊接过程中持续为超声变幅杆提供压紧力。利用减压阀调节进入气缸的压缩空气的压力,可以实现超声振动头对试板表面压紧力的控制。当工件表面形貌存在局部起伏,气缸可驱动超声振动头做出即时响应,保证二者的紧密接触,发挥类似气弹簧的效果。
75.本实施方式的一种航天用超高强度钢随焊超声辅助激光焊接方法,它是按照以下步骤进行的:
76.步骤一:将厚度为2.5mm的航天动力舱段壳体用超高强度30cr3钢用砂轮机打磨去除表面氧化膜,直至表面露出金属光泽。用600#砂纸对试板表面进行二次打磨,消除砂轮机打磨产生的表面局部起伏,使试板表面光滑平整。用丙酮擦拭对接边及待焊面,去除表面油污。
77.步骤二:将处理后的待焊试板4固定在焊接工装夹具上,对接间隙小于板厚的10%。
78.步骤三:调节激光焊接头1的位置及姿态,使激光束在工件表面聚焦,优选离焦量为0。为防止试板表面的反射激光对激光器造成损伤,调节激光头与竖直方向夹角为5
°
。利用机器人操作面板对焊接轨迹进行示教,示教点包括初始位置点、焊接起始点和焊接终止点,所述初始位置点位于焊接起始点上方50mm处。调节连接夹具2的z向位移机构和旋转机构,使超声振动头8与待焊试板接触并与水平方向呈45
°
。调节连接夹具2的x向、y向位移机构,使超声振动头偏置激光作用点一定距离,在本实施例中x向偏置0mm,y向偏置20mm。激光作用点与超声作用点的连线垂直于焊缝方向。
79.步骤四:设置激光焊接参数、超声发生参数。本实施例中激光焊接功率优选为4000w,焊接速度优选为1.2m/min。保护气种类为纯氩,保护气流量优选为20l/min。所述超声发生参数包括超声频率和振幅增益,本实施例中优选频率为20khz,优选振幅增益为10%。开启与尾部气缸10相连的压缩空气,并利用减压阀调节气体压力为0.2mpa。
80.步骤五:利用机器人集成控制系统开启激光焊接头1、超声电源,首先超声发生装置3产生超声波作用于待焊试板4,3s后激光器发出激光,同时机器人按预先示教的焊接轨迹行走开始焊接过程。
81.步骤六:机器人移动到焊接终止点位置,激光焊接头1关闭,保持超声发生装置3工作3s后关闭超声电源。依次关闭保护气、压缩空气,结束焊接过程。
82.本实施例将超声波的高频振动能场作用于焊接熔池,利用其一系列有益效应,改
善焊缝凝固结晶组织。在不改变原有激光焊接系统下,采用随焊接触式超声施加方式,设备组成简单,超声的能量利用率高。同时发挥激光焊接能量密度高、焊接变形小、热影响区窄的优势,可有效抑制航天用超高强度钢焊接时容易出现的冷裂纹以及热影响区的软化和脆化问题,提高接头的综合性能,实现动力舱段壳体焊接的控形控性目标。
83.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。本领域技术人员依据本发明的思想可以在权利要求范围内做出各种变形或修改,这并不影响本发明的实质内容,均应包含在本发明权利要求的保护范围之内。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1