一种钢拱架法兰焊接装置及钢拱架自动加工系统的制作方法
1.本技术涉及型钢加工的领域,尤其是涉及一种钢拱架法兰焊接装置及钢拱架自动加工系统。
背景技术:
2.在隧道开挖过程中,钢拱架是隧道初期支架结构中重要的组成部分,也是隧道混凝土施工前支护的重要内容。
3.钢拱架一般采用型钢加工而成,将型钢首尾焊接后,将型钢弯曲成一定弧度后,按照隧道尺寸切断而成弧形的钢架,最后在钢架的两端焊接法兰而成钢拱架。
4.但是在加工钢拱架的过程中,由于钢拱架加工装置中的焊接装置难以焊接到钢拱架的背面,需要人工补焊,耗费加工时的人力和物力。
技术实现要素:
5.为了提高钢拱架焊接效率,本技术提供一种钢拱架法兰焊接装置及钢拱架自动加工系统。
6.第一方面,本技术提供的一种钢拱架法兰焊接装置,采用如下的技术方案:一种钢拱架法兰焊接装置,包括机架,所述机架上安装有法兰焊接机器人,还包括:光电传感器,设置在机架上,用于检测到钢拱架移动至所述夹紧组件上时,向控制器发出检测信号;夹紧组件,包括底架和安装在所述底架上的夹紧臂,所述底架上安装有驱动组件;所述驱动组件,用于在控制器接收到所述检测信号后,驱动所述夹紧臂靠近所述底架;或在控制器接收到法兰焊接机器人发送的第二完成信号后,驱动夹紧臂远离所述底架;所述法兰焊接机器人,用于在控制器控制所述驱动组件夹紧所述钢拱架后,启动焊接,并在焊接完成钢拱架正面后向控制器发送第一完成信号;或在控制器控制所述转动组件正向转动后,启动焊接,并在焊接完成钢拱架背面后向控制器发送第二完成信号;转动组件,设置在所述机架上,用于在控制器接收到所述第一完成信号后,带动所述夹紧组件正向转动预设角度;以及,在所述控制器控制所述夹紧臂远离所述底架后,带动所述夹紧组件反向转动预设角度;所述驱动组件、所述转动组件、所述法兰焊接机器人和所述光电传感器均与所述控制器连接。
7.通过采用上述技术方案,当光电传感器检测到钢拱架放置在了夹紧组件上时,向控制器发送检测信号,控制器接收到检测信号后,控制夹紧臂靠近底架,夹紧臂夹紧钢拱架,并控制法兰焊接机器人启动焊接,焊接完成钢拱架正面后,法兰焊接机器人向控制器发送第一完成信号。控制器接收到第一完成信号后,控制转动组件正向转动,带动夹紧组件正
向转动预设角度完成翻转,接着,控制器控制法兰焊接机器人再次启动焊接,焊接完成钢拱架背面后,法兰焊接机器人向控制器发送第二完成信号。控制器接收到第二完成信号后,控制夹紧臂远离底架,夹紧臂松开钢拱架,接着控制转动组件反向转动,带动夹紧组件反向转动预设角度完成翻转,夹紧组件恢复原位。因此,在加工钢拱架的过程中,自动焊接钢拱架背面,无需人工补焊,提高钢拱架加工效率。
8.可选的,所述转动组件在所述控制器控制所述夹紧臂远离所述底架后,驱动所述夹紧组件反向转动第一预设角度,并在预设时间后,驱动所述夹紧组件反向转动第二预设角度,所述第一预设角度和所述第二预设角度的和等于所述预设角度。
9.通过采用上述技术方案,控制器驱动夹紧组件反向转动第一预设角度,使钢拱架被放置在成品放置架上,即钢拱架与夹紧组件脱离,并且在钢拱架远离夹紧组件的过程中,避免底架与钢拱架之间有摩擦,保护夹紧组件,并且夹紧组件反向转动第二预设角度后,夹紧组件恢复原位,等待加工下一个钢拱架。
10.可选的,所述驱动组件包括固定在所述底架上的支架,所述支架一端铰接有转动架,所述支架另一端铰接有夹紧液压缸,所述夹紧液压缸的输出端与所述转动架的另一端铰接,所述夹紧臂固定在所述转动架上。
11.通过采用上述技术方案,夹紧液压缸推动转动架转动,使夹紧臂相向底架转动,进而压紧钢拱架,实现自动锁紧钢拱架,提高自动化程度。
12.可选的,所述底架上设置有托辊,所述夹紧臂位于所述托辊上方。
13.通过采用上述技术方案,减小与钢拱架的接触面积,在钢拱架滑动到夹紧组件或离开夹紧组件时,均减小钢拱架与夹紧组件之间的摩擦,保护夹紧组件。
14.可选的,所述转动组件包括设置在所述机架内的转动电机,所述转动电机与所述控制器连接,所述机架上转动连接有圆盘,所述转动电机的输出端与所述圆盘固定,所述圆盘上固定有支撑臂,所述支撑臂与所述底架固定。
15.通过采用上述技术方案,在控制器的控制下,转动电机转动,转动电机带动圆盘转动,圆盘上的支撑臂带动底架一同转动,进而实现翻转钢拱架,提高使用便利性和加工过程中的自动化程度。
16.可选的,所述机架一侧设置有推正组件,所述推正组件包括设置在机架上的连接轨,所述连接轨上滑动连接有底架,所述底架上固定有推板,所述机架上固定有推正液压缸,所述推正液压缸与所述底架固定,所述推正液压缸的输出方向与所述连接轨延伸方向平行。
17.通过采用上述技术方案,在控制器的控制下,推正液压缸动作,带动底架在连接轨上滑动,使推板推动钢拱架,摆正钢拱架的位置,便于焊接钢拱架,提高加工精度,使自动化加工过程顺利进行。
18.可选的,述夹紧臂内设置有钢索,所述钢索一端位于夹紧臂内,所述钢索另一端由所述夹紧臂远离所述转动架的一侧伸出,并固定有可被磁化的连接块,所述夹紧臂上设置有用于收卷所述钢索的收卷组件;所述底架上设置有竖直的滑槽,所述滑槽内滑动连接有电磁铁,所述电磁铁靠近槽底的一侧固定有弹簧,所述底架上设置有固定筒,所述固定筒内竖直滑动连接有重锤,所述重锤远离所述夹紧臂的一侧与所述弹簧之间固定有连接绳;
所述电磁铁和所述收卷组件均与所述控制器连接,在控制器接收到检测信号时,控制所述收卷组件放卷所述钢索以及所述电磁铁通电;在控制器接收到第二完成信号时,控制所述收卷组件收卷以及所述电磁铁断电。
19.通过采用上述技术方案,在控制器接收到检测信号时,控制收卷组件放卷钢索、电磁铁通电,在重力的作用下,连接块牵引钢索拉长,连接块与电磁铁通电,钢索、夹紧臂和底架环绕在钢拱架周围。在钢拱架翻转后,在重力的作用下,重锤牵动电磁铁在滑槽内滑动,钢索被拉紧,减小夹紧臂受到的力,保护夹紧组件。
20.可选的,所述收卷组件包括固定在所述夹紧臂上的收卷电机,所述夹紧臂内转动连接有收卷辊,所述收卷电机与所述收卷辊之间连接有电磁离合器;所述电磁离合器和所述收卷电机均与所述控制器连接,在控制器接收到检测信号时,控制器控制所述电磁离合器断开;在控制器接收到第二完成信号时,控制所述电磁离合器闭合且收卷电机转动。
21.通过采用上述技术方案,在控制器接收到检测信号时,控制控制电磁离合器断开,收卷辊即可转动,使钢索被拉开,而在控制器控制电磁离合器闭合后,收卷电机带动带动收卷辊收卷钢索,使连接块被牵引起。
22.可选的,所述电磁铁的面积大于所述连接块的面积。
23.通过采用上述技术方案,当连接块落下时,便于被更大面积的电磁铁吸附。
24.第二方面,本技术提供的一种钢拱架自动加工系统,包括如第一方面中任一项所述的一种钢拱架法兰焊接装置;还包括:进料辊,用于运送所述工字钢;端头切断装置,用于切割所述工字钢的端头;型材续接焊接装置,用于在工字钢的端头被切掉后,焊接两相邻的工字钢;型材冷弯装置,用于将续焊后的工字钢弯拱成钢拱架;弯拱后切断装置,用于定长切断钢拱架;吊装运送装置,用于将定长的钢拱架吊装至送料装置;送料装置,用于将所述钢拱架送至两相对设置的钢拱架法兰焊接装置之间;成品暂存架,用于承接所述焊接后的钢拱架。
25.通过采用上述技术方案,进料辊运送工字钢,端头切断装置切割工字钢的端头,型钢续接焊接装置将两相邻的工字钢焊接在一起,型材冷弯装置将工字钢弯拱成钢拱架,弯拱后切断装置切割成定长的钢拱架,钢拱架被吊装运送装置运动至送料装置上,法兰焊接装置焊接完成法兰和钢拱架的正面后,翻转钢拱架并焊接背面,焊接完成后的钢拱架放置在成品暂存架上。
26.综上所述,本技术包括以下至少一种有益技术效果:1.在加工钢拱架的过程中,自动焊接钢拱架背面,无需人工补焊,提高钢拱架加工效率;2.在控制器接收到检测信号时,控制收卷组件放卷钢索、电磁铁通电,在重力的作用下,连接块牵引钢索拉长,连接块与电磁铁通电,钢索、夹紧臂和底架环绕在钢拱架周围。在钢拱架翻转后,在重力的作用下,重锤牵动电磁铁在滑槽内滑动,钢索被拉紧,减小夹紧臂受到的力,保护夹紧组件。
附图说明
27.图1是本技术实施例中钢拱架加工系统的结构示意图。
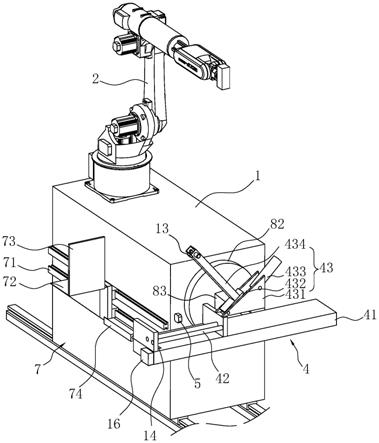
28.图2是本技术实施例中钢拱架法兰焊接装置的结构示意图。
29.图3是本技术实施例中钢拱架法兰焊接装置的结构框图。
30.图4是本技术实施例中夹紧组件夹紧钢拱架的结构示意图。
31.图5是本技术实施例中夹紧组件夹紧钢拱架翻转后的结构示意图。
32.图6是本技术实施例中收卷钢索的结构示意图。
33.图7是本技术实施例中重锤牵拉钢索的剖面图。
34.图8是本技术实施例中型材冷弯装置的结构示意图。
35.附图标记说明:1、机架;2、法兰焊接机器人;3、钢拱架;4、夹紧组件;41、底架;411、滑槽;42、托辊;43、驱动组件;431、支架;432、转动架;433、夹紧液压缸;434、夹紧臂;5、光电传感器;6、控制器;7、推正组件;71、连接轨;72、滑动架;73、推板;74、推正液压缸;8、转动组件;81、转动电机;82、圆盘;83、支撑臂;9、钢索;10、收卷电机;11、收卷辊;12、电磁离合器;13、连接块;14、电磁铁;15、弹簧;16、固定筒;17、重锤;18、连接绳;19、进料辊;20、端头切断装置;21、型材续接焊接装置;22、型材冷弯装置;221、工作台;222、压紧组件;2221、支撑架;2222、支撑辊;223、导引辊;224、压弯液压缸;225、压弯辊;23、弯拱后切断装置;24、送料装置;25、法兰焊接装置;26、成品暂存架。
具体实施方式
36.以下结合附图1-8对本技术作进一步详细说明。
37.本技术实施例公开一种钢拱架法兰焊接装置,参照图1和图2,设置钢拱架加工系统中,包括机架1,机架1底端滑动连接在滑轨上,在使用时,两个法兰焊接装置25相对设置,根据钢拱架3的尺寸滑动机架1,进而调节两机架1之间的距离,使钢拱架3位于两法兰焊接装置25之间时,钢拱架3的端部位于两机架1相靠近的一侧。
38.两法兰焊接装置25一侧设置有送料装置24,另一侧设置有成品暂存架26,法兰通过人工点焊在钢拱架3上后,钢拱架3通过送料装置24传送至两法兰焊接装置25之间。
39.机架1上设置有法兰焊接机器人2,本技术实施例中,法兰焊接机器人2为现有技术,本技术不再对其功能做具体详述。法兰焊接机器人2可通过工业相机,自动查找法兰和钢拱架3之间的焊缝,并自动调整焊接角度,焊接法兰和钢拱架3。
40.在机架1一侧设置有夹紧组件4,夹紧组件4包括底架41,底架41一端上表面设置有两相平行的托辊42,托辊42的轴线与底架41延伸方向平行。在托辊42一侧的底架41上还设置有驱动组件43。
41.驱动组件43包括固定在底架41上的支架431,支架431靠近托辊42的一端铰接有转动架432,转动架432的另一端与一夹紧液压缸433的输出端铰接,夹紧液压缸433的缸体铰接在支架431远离托辊42的一端上,在转动架432靠近托辊42的一侧固定有夹紧臂434。
42.在机架1上设置有光电传感器5,光电传感器5检测托辊42上方是否放置有钢拱架3,光电传感器5和夹紧液压缸433均与控制器6连接,当光电传感器5检测到钢拱架3时,向控制器6发送检测信号。
43.在机架1靠近送料装置24的一侧设置有推正组件7,推正组件7包括设置在机架1上
的连接轨71,连接轨71水平设置且与送料装置24的传送方向垂直。在连接轨71上滑动连接有滑动架72,滑动架72上固定有推板73。机架1上还固定有推正液压缸74,推正液压缸74与滑动架72固定,具体地,推正液压缸74的缸体可以与滑动架72固定,且推正液压缸74的输出端与机架1固定。推正液压缸74与控制器6连接。
44.当控制器6接收到检测信号时,控制器6控制推正液压缸74动作,使滑动架72沿连接轨71滑动,推板73推动法兰,即两法兰焊接装置25上的推板73相向动作,将钢拱架3推正在两个法兰焊接装置25之间,然后推正液压缸74回位。
45.参照图3和图4,接着,控制器6控制夹紧液压缸433伸出,使转动架432带动夹紧臂434靠近底架41,进而使夹紧臂434抵紧在钢拱架3上表面,钢拱架3被夹紧在夹紧组件4上。进而,控制器6控制法兰焊接机器人2开始焊接法兰和钢拱架3的正面,在焊接完成正面后,法兰焊接机器人2向控制器6发送第一完成信号。
46.参照图2和图3,在机架1上还设置有转动组件8,转动组件8包括设置在机架1内的转动电机81(图中未示出),还包括转动连接在机架1上的圆盘82,转动电机81的输出端与圆盘82的圆心固定,因此,转动电机81可带动圆盘82转动。在圆盘82上固定有支撑臂83,支撑臂83固定在底架41上。当控制器6接收到第一完成信号后,控制器6控制转动电机81正向转动预设角度,预设角度可以为180度,进而使夹紧组件4带动钢拱架3翻转,并从送料装置24移动到成品暂存架26上。
47.参照图3和图5,转动组件8完成正向翻转后,控制器6控制法兰焊接机器人2开始焊接法兰和钢拱架3的背面。在焊接完成背面后,法兰焊接机器人2可向控制器6发送第二完成信号。
48.当控制器6接收到第二完成信号后,接着控制器6控制夹紧液压缸433缩回,即夹紧臂434远离底架41,钢拱架3落在成品暂存架26上,同时控制器6控制转动电机81反向转动第一预设角度,第一预设角度可以为10度,使底架41悬在钢拱架3的上方,防止钢拱架3在移动过程中与夹紧组件4摩擦。
49.当成品暂存架26将钢拱架3带离后,控制器6控制转动电机81继续反向转动第二预设角度,第二预设角度可以为170度,使夹紧组件4恢复到原位。其中第一预设角度和第二预设角度的和与预设角度相等,且第一预设角度和第二预设角度的大小不唯一。
50.参照图2和图6,为了减小翻转后夹紧臂434受到的压力,在夹紧臂434内还设置有钢索9,钢索9一端位于夹紧臂434内,另一端由夹紧臂434远离转动架432的一侧伸出。在夹紧臂434一侧固定有收卷电机10,在夹紧臂434内转动连接有收卷辊11,在收卷辊11和收卷电机10输出端之间固定有电磁离合器12。钢索9一端缠绕在收卷辊11上,另一端固定有连接块13,连接块13为可此话的金属制成。收卷电机10和电磁离合器12均与控制器6连接。
51.参照图2和图7,在底架41上设置有竖直开设的滑槽411,滑槽411位于夹紧臂434端部正下方,在滑槽411内滑动连接有电磁铁14,电磁铁14的顶面积大于连接块13的侧面面积。在电磁铁14靠近槽底的一侧固定有弹簧15,在无外力作用下,弹簧15推动电磁铁14悬在滑槽411顶部。
52.在底架41上固定有母线竖直的固定筒16,固定筒16内沿竖直方向滑动连接有重锤17,在重锤17远离夹紧臂434的一侧和弹簧15之间固定有无弹性的连接绳18。电磁铁14与控制器6连接。
53.参照图3和图4,当控制器6控制夹紧液压缸433伸出的同时,控制器6控制电磁离合器12断开,收卷辊11解除锁定,并控制电磁铁14通电,连接块13在重力的作用下下落,电磁铁14吸附连接块13。钢索9从收卷辊11上被拉出,因此钢索9牵拉在夹紧臂434和底架41之间,钢索9、夹紧臂434和底架41圈紧钢拱架3。
54.参照图7,当底架41翻转后,重锤17在重力的作用下,在固定筒16内滑动,重锤17拉动连接绳18,连接绳18拉动弹簧15,使弹簧15带动电磁铁14向滑槽411内滑动,进而钢索9被拉紧,为夹紧臂434施加一个向上的力,减小夹紧臂434受到的压力,保护夹紧组件4。
55.当控制器6接收到第二完成信号后,控制器6控制电磁离合器12连接、收卷电机10启动和电磁铁14断电,即钢索9被收卷到收卷辊11上,钢拱架3得以从夹紧组件4上移出。
56.本技术实施例一种钢拱架法兰焊接装置的实施原理为:当传送装置将钢拱架3放置在托辊42上后,光电传感器5向控制器6发送检测信号,控制器6接收到检测信号后,控制器6控制推正液压缸74动作,推板73推动钢拱架3,使钢拱架3摆正在两个法兰焊接装置25之间。
57.接着,控制器6控制夹紧液压缸433伸长,夹紧臂434夹紧钢拱架3,同时控制器6控制电磁离合器12断开,并且电磁铁14通电,连接块13被吸附在电磁铁14上,钢索9环绕在钢拱架3一侧。控制器6控制法兰焊接机器人2开始焊接,当焊接完成正面后,法兰焊接机器人2向控制器6发送第一完成信号。
58.控制器6接收到第一完成信号后,控制转动电机81转动预设角度,钢拱架3翻转后背面朝上。在重锤17的作用下,连接绳18牵动电磁铁14和连接块13向滑槽411内部移动,钢索9被拉紧。控制器6控制法兰焊接机器人2再次动作,当法兰焊接机器人2焊接完成背面后,向控制器6发送第二完成信号。
59.当控制器6接收到第二完成信号后,控制器6控制电磁离合器12连接、收卷电机10启动、电磁铁14断电和夹紧液压缸433缩回,并且控制转动电机81反向转动第一预设角度。当成品暂存架26将钢拱架3带离底架41后,控制器6控制转动电机81反向转动第二预设角度。直至夹紧组件4恢复原位、钢索9收卷在收卷辊11上。
60.本技术实施例还提供一种钢拱架自动加工系统,参照图1,包括上述的钢拱架法兰焊接装置25,还包括:进料辊19,用于运送工字钢;端头切断装置20,用于切割工字钢的端头;型材续接焊接装置21,用于在工字钢的端头被切掉后,焊接两相邻的工字钢;在型材续接焊接装置21完成工字钢一侧焊接后,人工在工字钢另一侧补焊;型材冷弯装置22,用于将续焊后的工字钢弯拱成钢拱架3;弯拱后切断装置23,用于定长切断钢拱架3;吊装运送装置,用于将定长的钢拱架3吊装至送料装置24,具体可以采用天车;送料装置24,用于将钢拱架3送至两相对设置的钢拱架法兰焊接装置25之间;成品暂存架26,用于承接焊接后的钢拱架3。
61.其中,在钢拱架加工系统中,每个装置均对应有控制器,各个控制器均连接至中控装置,中控装置与各个控制器相通讯,以实现加工系统的自动运行。
62.端头切断装置20和型材续接焊接装置21一侧的进料辊19上设置有编码器,编码器
与端头切断装置20的第一控制器连接。当第一控制器通过编码器检测到工字钢传送达到预设长度后,第一控制器控制端头切断装置20动作,将工字钢的两端切割,使工字钢端部平整,便于续焊;还控制型材续接焊接装置21开始续焊。
63.进一步地,参照图8,型材冷弯装置22包括工作台221,工作台221上设置有四组压紧组件222,四组压紧组件222呈扇形分布,每个压紧组件222均包括一个支撑架2221,支撑架2221上设置有一对支撑辊2222,工字钢可从两个支撑辊2222中穿过,在支撑架2221一侧设置有导引辊223,导引辊223带动工字钢缓慢从支撑架2221中穿过。在两组压紧组件222之间的工作台221上固定有压弯液压缸224,压弯液压缸224的输出端固定有压弯辊225,当冷弯工字钢时,压弯液压缸224的输出端伸长,使压弯辊225接触工字钢,压弯辊225和导引辊223分别位于工字钢的两侧,工字钢被弯曲成弧形。
64.进一步地,在型材冷弯装置22的其中一支撑辊2222上设置有编码器,编码器与型材冷弯装置22的第二控制器连接,当第二控制器根据编码器检测到钢拱架3运送达到一定长度后,第二控制器控制弯拱后切断装置23切断钢拱架3。
65.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1