一种机床上下料柔性抓手的制作方法
1.本发明涉及自动化生产设备技术领域,尤其涉及一种机床上下料柔性抓手。
背景技术:
2.现有的cnc机床加工过程中需要满足对工件的上下料,特别是齿轮一类的工件在上下料时必须实现高精度定位,以避免后续机器人在动作过程中产生别劲等问题,但是现有的上下料抓手无法满足要求。
技术实现要素:
3.本发明的目的在于提供一种机床上下料柔性抓手,针对cnc加工的工件上下料高精度定位,解决机器人编程繁琐,点位示教难度大,后续机器人在动作过程中可能产生别劲等问题。
4.为实现上述目的,本发明提供如下技术方案:
5.一种机床上下料柔性抓手,其特征在于,包括安装块,所述安装块上设置有第一抓手组件和第二抓手组件,所述第一抓手组件和第二抓手组件位于安装块相邻的侧面上,所述第一抓手组件和第二抓手组件均包括柔性补偿装置、抓手气缸及其抓料夹具,所述柔性补偿装置与所述抓手气缸之间通过安装板连接,所述抓料夹具固定在所述抓手气缸上,所述抓手气缸上还设置有辅助顶料模组,所述辅助顶料模组用于支撑抓料夹具。
6.本发明进一步设置,所述安装块的第一侧面开设有气管收集口,与第一侧面相对设置的第二侧面上设置有法兰件,所述法兰件之间设置有套筒件,所述套筒件上设置有气管出口。
7.本发明进一步设置,所述柔性补偿装置为六自由度柔性补偿装置或三自由度柔性补偿装置。
8.本发明进一步设置,所述第一抓手组件位于所述安装块的第三侧面上,所述第二抓手组件位于所述安装块的第四侧面上,所述第三侧面和第四侧面相邻。
9.本发明进一步设置,所述第一抓手组件的一侧设置有机床吹屑喷嘴,所述机床吹屑喷嘴固定于安装块上。
10.本发明进一步设置,所述三自由度柔性补偿装置上设置有对中气口、任意位置锁定气口以及柔性补偿气口。
11.本发明进一步设置,所述六自由度柔性补偿装置上设置有对中气口。
12.本发明进一步设置,所述抓手气缸上设置有吹尘气口、夹爪开气口以及夹爪闭气口。
13.本发明的有益效果:针对cnc加工的工件上下料高精度定位,解决机器人编程繁琐,点位示教难度大,后续机器人在动作过程中可能产生别劲的问题。
附图说明
14.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
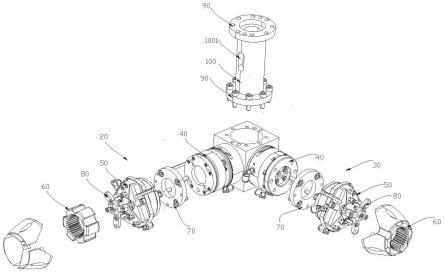
15.图1为本发明实施例的爆炸示意图。
16.图2为本发明实施例的立体图。
17.图3为本发明实施例六自由度柔性补偿装置的示意图。
18.图4为本发明实施例三自由度柔性补偿装置的示意图。
19.附图标记,
20.10、安装块;20、第一抓手组件;30、第二抓手组件;40、柔性补偿装置;50、抓手气缸;60、抓料夹具;70、安装板;80、辅助顶料模组;90、法兰件;100、套筒;1001、气管出口;110、气管收集口;120、机床吹屑喷嘴;130、对中气口;140、任意位置锁定气口;150、柔性补偿气口;160、吹尘气口;170、夹爪开气口;180、夹爪闭气口;190、缸体;200、活动盖;210、弹簧座;220、安装面板;230、腔体;240、活塞;250、活塞杆;260、上盖;270、模块罩体;280、活动体;290、底座;300、第一活塞孔;310、第二活塞孔;
具体实施方式
21.以下将配合附图及实施例来详细说明本技术的实施方式,借此对本技术如何应用技术手段来解决技术问题并达成技术功效的实现过程能充分理解并据以实施。
22.如图1-2所示,本发明为一种机床上下料柔性抓手,包括安装块10,所述安装块10上设置有第一抓手组件20和第二抓手组件30,所述第一抓手组件20和第二抓手组件30位于安装块10相邻的侧面上,所述第一抓手组件20和第二抓手组件30均包括柔性补偿装置40、抓手气缸50及其抓料夹具60,所述柔性补偿装置40与所述抓手气缸50之间通过安装板70连接,所述抓料夹具60固定在所述抓手气缸50上,所述抓手气缸50上还设置有辅助顶料模组80,所述辅助顶料模组80用于支撑抓料夹具60。本发明当中以齿轮加工为例,当需要将齿轮装入cnc夹具的时候,需要通过齿和齿之间实现定位,在cnc上料时,先把六自由度柔性补偿装置的柔性气口打开,此时柔性补偿是活动的。机器人在装夹的时候,第六轴顺时针与逆时针来回转动,用来模拟人手去适配齿和齿之间的定位,这样齿轮才能顺利滑入夹具。
23.取料的过程,也是先把柔性气口打开,此时柔性补偿能6个自由度活动。机器人在把齿轮从夹具中拔出的时候,不会对齿轮面造成硬擦伤。
24.其中第一抓手组件20用于取料,所述第二抓手组件30用于上料。
25.所述安装块10的第一侧面开设有气管收集口110,与第一侧面相对设置的第二侧面上设置有法兰件90,所述法兰件90之间设置有套筒100件,所述套筒100件上设置有气管出口1001,套筒100、气管收集口110和气管出口1001用于放置和收集气管。
26.所述柔性补偿装置40为六自由度柔性补偿装置40或三自由度柔性补偿装置40。
27.其中第一抓手组件20中优选为六自由度柔性补偿装置40,第二抓手组件30中优选为三自由度柔性补偿装置40,可以根据需求进行选择,即第一抓手组件20中也可以采用三自由度柔性补偿装置40,第二抓手组件30中也可以采用六自由度柔性补偿装置40。
28.所述第一抓手组件20位于所述安装块10的第三侧面上,所述第二抓手组件30位于所述安装块10的第四侧面上,所述第三侧面和第四侧面相邻。
29.所述第一抓手组件20的一侧设置有机床吹屑喷嘴120,所述机床吹屑喷嘴120固定于安装块10上,其安装面为第四侧面的相对面。
30.所述三自由度柔性补偿装置40上设置有对中气口130、任意位置锁定气口140以及柔性补偿气口150,所述六自由度柔性补偿装置40上设置有对中气口130,所述抓手气缸50上设置有吹尘气口160、夹爪开气口170以及夹爪闭气口180。
31.如图3所示,其中本发明当中所采用的六自由度柔性补偿装置40的结构如下:六自由度的柔性补偿装置40,包括缸体190、活动盖200、弹簧座210以及用于连接机械手的安装面板220,所述缸体190内形成腔体230,所述腔体230内设置有活塞240,所述活塞240的一端连接有活塞杆250,所述活塞杆250穿过所述活动盖200与所述弹簧座210内设置的顶针相对设置,所述缸体190上开设有进气孔(即对中气口130),所述进气孔与所述腔体230相通,通过气体作用于所述活塞240向活塞杆250一侧移动。
32.六自由度柔性补偿装置40的原理如下:当进气孔进气时,气体作用于活塞240,推动活塞杆250的同时带动活动盖200向弹簧座210一侧移动,直至顶针和活塞杆250相抵对中;不通气之后,所述活动板在弹簧的作用下复位,实现自由摆动,实现在六个自由度上的柔性补偿。上述结构在本司申请的专利名称为“一种六自由度的柔性补偿装置40”中有详细的描述;此处就不在多做描述。
33.如图4所示,本发明为一种三自由度的柔性补偿装置40,包括从上至下依次设置的上盖260、模块罩体270、活动体280以及底座290,所述活动体280与所述底座290活动连接,所述上盖260与所述模块罩体270之间构成腔体230,所述活动体280位于所述底座290和所述模块罩体270之间,且活动体280活动设置在所述底座290上,所述模块罩体270内设置有第一活塞孔300以及第二活塞孔310,第一活塞孔300和第二活塞孔310对称设置,所述第一活塞孔300内设置第一活塞240,所述第二活塞孔310内设置第二活塞240,所述模块罩体270的侧面上设置有进气孔a(即对中气口130)和进气孔b(任意位置锁定气口140),所述进气孔a进气时驱动第一活塞240和第二活塞240下移并作用于活动体280使底座290下移,所述进气孔b进气时驱动第一活塞240和第二活塞240上移并作用于活动体280使底座290上移。上述结构在本司申请的专利名称为“一种三自由度的柔性补偿装置40”中有详细的描述;此处就不在多做描述
34.三自由度柔性补偿装置40的工作原理:当进气孔a进气时,通过第一活塞240和第二活塞240的下移,实现对装置的锁死;当进气孔b进气时,实现在装置的解锁,底座290和活动体280能够实现x/y方向上的移动以及在x/y平面内的转动。
35.如在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可理解,硬件制造商可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名称的差异来作为区分组件的方式,而是以组件在功能上的差异来作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”为一开放式用语,故应解释成“包含但不限定于”。“大致”是指在可接收的误差范围内,本领域技术人员能够在一定误差范围内解决所述技术问题,基本达到所述技术效果。
36.需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的商品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种商品或者系统所固有的要素。在没有更多限制的情况
下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的商品或者系统中还存在另外的相同要素。
37.上述说明示出并描述了本发明的若干优选实施例,但如前所述,应当理解本发明并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述发明构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1