辊交叉锂电轧机的制作方法
1.本发明涉及一种辊交叉锂电轧机,特别是涉及锂电池行业电池极片的辊压。
背景技术:
2.1932年,美国开发出了轧辊配对交叉(pair cross)的pc轧机,1979~1981经日本新日铁和三菱重工改良,在金属轧制领域逐步获得了应用。锂电行业的电池极片辊压(行业用语,等同轧制)有一定的特殊性,现在常用的正极材料以铝箔为集流体,涂层体系有钴酸锂、锰酸锂、磷酸铁锂、三元材料等,负极材料以铜箔为集流体,涂层体系有人造石墨、天然石墨、复合石墨等。处于过渡阶段的复合膜集流体替代金属箔的新型正负极正在兴起,在塑料膜表面磁溅射的金属膜层仅1μm,与铜或铝箔集流体相比,更多表现出塑料的特性。由于涂层体系不同,压实密度也有较大的差异,正负极轧制力相差较大,极片机械特性各异。凸度(横截面上各测量点最大厚度差)控制主要是采用液压弯辊技术,以抵消辊身的部分挠度,也有少量采用曲线辊拟合挠度曲线方案,达到控制凸度的目的。虽然交叉辊在凸度控制上具有较大的控制范围和较高的控制精度,轧件(被轧制的材料)越宽,调控能力越大,但交叉辊技术在电池极片生产中并未获得应用,也未检索到相关专利文献和公开资料,抛开验证成本高,风险大的市场经济因素,单论技术上的原因,可能是辊交叉带来的负面影响较多,风险较大,钢质板带与电池极片的轧制有本质上的区别,难以直接借用金属轧制领域现有成熟的技术成果。
3.辊交叉的缺点:轴向力大,结构上的间隙引起的陀螺进动效应对轴承寿命有很大影响(引用《四轧辊微动交叉机理及控制研究》 燕山大学 李明 博士论文);轧辊磨损大,换辊周期短;活动部位较多,整体刚性相对不足。
4.钢质板带与电池极片轧制的区别:㈠ 钢材轧制是塑性变形,有展宽和展长量,轧件密度不变化;而电池极片轧制是孔隙压缩,极片上电池涂料被压实,密度变大。
5.㈡ 凸度差要求不同,金属板带轧制控制在
±
50μm以下,电池极片控制在
±
2μm以下。
6.㈢ 轧件表面质量要求不同,对钢材而言,主要是对外观的要求;对电池极片则体现在电池成品安全和性能的影响上,电池极片辊压造成的表面缺陷与压入表面的有害颗粒,会直接影响电池负极析锂、 正极析铜、 尖角放电,最终酿成安全事故,对电池的电特性也有不良影响。
7.㈣ 轧制工艺不同,钢质板带的冷轧,伴生大量的热量,一般配备有冷却系统、润滑系统,交叉角设定后,可以固定不动,不需要板厚方向在线(不停机)调节,只需加装平衡机构控制跳辊,刚性较好;电池极片不能由冷却介质及润滑系统夹带其它任何驻留的组份。电池极片轧制过程中,会发生断带,需要上下辊相对位移出足够空间,方便引带穿带;贴胶接带部位,需要避让,防止轧断;空箔与单面涂布段,处理方式有停机剔除与避让二种方式,存在需要快速准确复位的情况。
8.㈤ 轧件材质不同,辊面的磨损机理也不同,轧件终极产品不同,对辊面的要求及轧件表面质量要求也不同;辊交叉时,沿交叉中心点向幅宽两侧,存在一个辊咬合线各点线速度和极片运动方向之间的线速度差值区域,轧钢时辊间产生相对滑移,在很大的接触压力下,磨损剧增,导致粗糙度值变大,有一些机型加装在线磨辊(org)以延长换辊周期就是这个原因;对极片辊压而言,相对滑移发生在极片与钢辊之间,表现为颗粒磨损,表面粗化相对缓慢,由于辊面粗糙度对极片表面影响很大,造成极片表面的微小损伤就会报废,也增加了产生褶皱乃至断带的风险,由于间隙原因,非主观因素产生的单辊交叉实际上是存在的,但并没有引起辊面的快速磨损,只有轴承的异常损坏来看,对辊的磨损机理分析是正确的。
9.㈥ 金属板带与电池极片的轧制力不同,前者约为后者的3倍,相对多辊轧制的工作辊,电池极片轧机可以用更大的辊径。
10.综上所述,“辊交叉”这一概念,具体应用到诸如纺织品、纸张、无纺布、复合膜、电池极片之机械性能相近的材料,其整理、压光、压花、染整、复合粘贴、压榨等工艺与辊压类同,且对板型(内部残余应力不均匀分布体现出的外观缺陷与理论外形的差值)与凸度误差控制要求很高的领域,需要攻克服许多困难和问题,特别是对锂电行业电池极片的辊压,是锂电轧机的重大技术突破。
11.目前锂电行业应用的辊压机使用的液压弯辊技术,是在辊两端支承轴承座外,施加反向弯矩,以减小辊身(参与辊压的圆柱面,不含辊颈)凸度,仅能对板型边部起调节作用,对辊身凸度曲线的塑型能力及拟合曲线的吻合度均很小,对锂电极片微米级凸度误差控制,作用非常有限,只能作为一种辅助手段。采用曲线辊拟合挠度曲线方案,辊身曲线的制造难度大,对幅宽、涂层材料体系的变化适应性差,应用极少。板型控制缺乏根本性解决方案,产生的板型误差主要依靠拉伸延展,加热等方式改善。比较有趣的冷辊或热辊控制技术,不乏研究和验证,但按钢材的线膨胀系数计算,沿辊身方向需要建立小于1℃温控梯度,其控温难度、稳定性、响应速度的解决,难度相当之高,工业应用前景不容乐观。
12.
技术实现要素:
本发明的目的,是提供一种辊交叉轧机,用简便易行的方式,克服现有技术存在的不足,针对锂电池极片的特殊性,通过独特的技术方案,充分发挥辊交叉轧制的优点,克服其特有的缺点,解决的核心问题是电池极片凸度控制的精准性和产品换型后的通用性,对板型控制也有一定积极意义。
13.本发明的目的是采用以下技术措施实现的:按交叉辊数量多少,可分为单辊交叉和多辊交叉;按交叉点的位置,可分为对称交叉和非对称交叉两种型式;按支承辊和工作辊相对位置,可分为轧辊成对交叉,工作辊交叉,支承辊交叉三种型式(引用《太钢译文》1996第2期 p41《交叉辊轧制过程中的特有现象》附图1,或《带钢冷连轧液压与伺服控制》科学出版社 刘宝权等编著 p7)。辊交叉时,理论接触线等效为以交叉点处为短半轴顶点,长半轴在百米以上的椭圆轮廓线,椭圆短半轴处截面直径最大,往辊身至两侧面直径逐渐减小,到辊身两侧时的减小量等于2倍的挠度值,轮廓线各点的线速度产生了一个对线速度走带方向微小差值分量,并呈对顶三角形分布,相接触的部位产生相对滑移,如果是钢与钢的接触,在强大接触压力作用下,滑移区会产生强烈的钢与钢的摩擦,导致磨损与发热,辊面粗糙度急剧恶化。如果轧件是钢材,这种现象无法避免,如果轧件是类似电池极片的材料,相对滑移区的磨损机理是颗粒磨损或纤维磨损,
咬合区外摩擦正压力主要表现为工作张力,远小于轧制力,磨损很微弱,虽然相对非交叉辊而言,磨损稍大一点,但影响很小,基本可以忽略。轧辊成对交叉型式是指工作辊与支承辊之间保持平行,没有钢与钢接触的滑移区,可以解决辊交叉磨损大的问题。单辊交叉的优点是辊不与其它钢质件接触,有效解决了磨损问题,但随着电池极片幅宽逐步加大,辊径相应加大时,产生的弹性压扁区域增大了与电池极片的接触面积,压缩抗力增大,需要加大轧制力,以解决压下率不足的问题,势必增大了设备尺寸和成本,而多辊轧制时工作辊辊径较小,通过加大支承辊辊径可满足凸度控制要求,上述单辊交叉与成对交叉方式,能有效解决磨损和宽幅大辊径时压下率不足问题。
14.辊组之间的接触压力较大,锂电行业的轧辊大多数是涂层辊,有防止生锈和提高表面硬度的双重作用。支承辊与工作辊之间,有一个合理的基材硬度和工作寿命匹配,特硬工作辊基材表面硬度可达100hs以上,镀铬及陶瓷涂层表面硬度更高,基材硬度与涂层的抗压、耐磨损能力有密切关联,涂层硬度与使用寿命关联因素较多,用基材表面硬度指标更方便特征量化,支承辊基材表面硬度要比工作辊低20-30hs的经验值,主要基于适当牺牲支承辊而加强对工作辊的保护,表面硬度具体选择范围要根据支承辊与工作辊的辊直径比,涂层厚度与抗剥离强度,轧件质量要求,换辊周期等综合考虑,一般相接触的辊直径比越大,硬度差越大,工作寿命匹配与轧件质量要求对硬度差的取值影响,主要依据经验判断。有一种多辊轧机托辊轴承(森吉米尔轴承),外圈壁很厚,多用于多辊冷轧机上,将其装配在支承辊的辊身上,由轴承的外圈与工作辊接触,相对运动发生在轴承内外圈滚动体之间,根据幅宽大小,在支承辊上加装数个森吉米尔轴承,形成多点接触的均布载荷,最大限度的避免了对工作辊的磨损;其缺点是受力点不变,需要定期转动轴承位置,再者整体结构比较复杂,增加了误差累积。
15.上压式和下压式的区别,下压式多见于轧钢领域,锂电池极片辊压仅见上压式,这二种方式的主要考量点是轧件的标高,操作与维护的便利性,如果轧件标高值太大,整条生产线上的其它附属装备都相应升高,显然是不合理的,因实质上是工作辊间的相对运动,为简便起见,本发明没有强调辊的上下方位对功能的影响,亦即改成下压式与本
技术实现要素:
没有实质性差异。
16.辊身受力后弯曲的挠曲线与椭圆轮廓线方程,在材质和线压力(单位长度上压力值)确定后,都可以简化成与辊径和长径比(辊身长度与辊径的比值)相关的函数,在交叉角不大的情况下,能完全满足吻合度误差要求。设计时,辊身长度往往是已知的,只需要选定一个合适的辊径,通过校核两种曲线极限载荷下的吻合度差值,加上其他环节的累积误差,总误差不超过凸度误差来确定辊径。例如:锂电池极片的凸度误差
±
2μm,单辊取单边值2μm,辊身的直线度误差按1μm,考虑到装配上的随机误差,曲线沿幅宽方向对应各点的吻合度误差应不大于1μm,比较安全的取值是按小于0.5μm核算辊径值。辊端移距量的大小决定交叉角大小,按核定辊径计算的挠度值或经验值确定,再按幅宽方向的实测厚度差进行微量调节。生产线上均配备在线激光测厚仪或板型辊,动态反馈厚度差,因此也可以将辊端移距量设计成由动力驱动,进而实现在线自动调节。设辊身直径为d,受力后产生的最大挠度值为δ,辊身端面处的移距量(辊端移距量)为x,,此公式可作为粗调移距量参考值;轴向力随交叉角的增大而增大,大于某一临界值后,轴向力下降,实验测试,轴向力小于轧制力的10%(引用《钢铁研究学报》1997年12月第9卷第6期《异步交叉轧制的轴向力
研究》),由于锂电辊压线速度均小于150m/min,远小于钢材板带轧制速度,冲击载荷较小,合理选用轴承,可以解决轴向力对轴承寿命的影响;相关运动件之间的间隙引起的振动,间隙对复位精度的影响,是比轴向力更值得关注的问题。
17.按实际受力情况建立辊身段的挠度曲线公式,按最大挠度和辊身长度为已知的二个坐标值,可计算出交叉角立剖面截线椭圆方程,在软件上测量或编程计算曲线吻合度差值,综合核定辊径大小。
18.固定在上下辊轴承座上的外圆柱面与固定在机架上的内圆柱面,形成独立可调交叉角度的内外圆柱面摩擦副。内外圆柱面配合,限制了四个方向的自由度,仅有沿上下方向的移动和旋转自由度没有限制;内圆柱面沿固定在机身上的燕尾滑轨移动,可以调节内外圆柱面的配合间隙,精确控制交叉角的大小,且不影响辊系在线上下移动,用固定在机架上的端板锁定内圆柱面在燕尾滑轨上的相对位置。从辊端轴承座处施力,用辊端移距量来量化辊交叉角大小,分别推动上下辊系旋转和锁紧,辊端移距量可手动或自动调节。也可以采用某一辊系固定(零交叉角),只调节另一辊系的交叉角,这种方式可以简化结构,还有非对称交叉,即交叉角的旋转中心不与辊长中点重合,这二种情况下,轧件受力相对于轧件运动方向的不对称性,对柔性轧件,存在褶皱与轴向移动的风险,需要谨慎选择。把几组交叉辊系安装在同一组机架中,形成节省空间的多级联轧,也是一种实质不变的应用。现有技术方案多采用机架与轴承座之间,加装衬板的方式,控制辊系上下活动的间隙,辊交叉时这种方式就不适用了;发明专利公开号cn1109390a《辊组交叉轧制的四辊轧机》采用的方案,实质上是斜面机构和浮动块进行辊的交叉偏移,以机架外一侧的弧形挡板为旋转中心定位,另一侧的肘杆机构锁紧;这种方式对轧制钢材而言是合理的,但对锂电池极片的辊压,就不适用了,首先是肘杆机构锁紧后,在线调节上下方向的运动就不能实现了;如果留有间隙,调整量化操作复杂,组件累积的传动间隙较大,交叉角定位精度不高,稳定性差,适应不了电池极片对凸度的要求。
19.交叉角度连续并量化可调,交叉角调节机构分为手动与自动方式,手动方式通过旋转手轮推动辊系旋转,自动方式用动力执行器分别驱动单辊交叉的上下辊系或辊组交叉的上下辊系组旋转。在驱动件与被驱动件相对运动分界面上,设有沿旋转半径方向自适应相对位移的浮动件,沿上下方向移动的下辊系,另加直线轨道,满足二个方向的复合运动要求,本发明把交叉角调节机构中具有自适应性的内外球面与直线导轨,统称为浮动件;驱动件丝杠要满足自锁条件,电动执行器电机带刹车,液压执行器带锁紧回路(引用《机械设计手册》 第五卷/成大先主编 p21-95)时,也具备自锁能力,可在任何位置锁紧,双重自锁更佳;当采用滚珠丝杠或大导程丝杠之类不能自锁的结构时,另增加机构锁定交叉角位置,不方便在线调节交叉角度和换辊操作,生产效率低下,因消除了间隙,刚性好,也是可以选择的方案;采用与旋转中心同心的的局部蜗轮加蜗杆方式,整套蜗轮蜗杆减速器安装在上下移动的直线轨道上,也是可选方案,但需要有锁紧装置解决过大的啮合间隙。
20.上辊与机架不固定,由承托机构承重,有微量的上下活动间隙,卸载轧制力后交叉角的调整更省力。在上辊轴承座的上方,加装了楔铁机构,用于调整上下活动间隙的大小以及辊水平度,过大的间隙会造成上辊卸载下落时的冲击力过大。下辊系结构与上辊系基本相同,区别在于下辊系的上下活动的距离较大,电池极片辊压过程中,会发生断带,极片贴胶接带部位,需要避让,防止轧断接带胶带,这二种情形都需要位移出较大的空间,方便引
带穿带或避让贴胶部位;空箔与单面涂布段,处理方式有停机剔除与避让二种方式,都需要暂时离开原调定好的辊缝位置,上下辊之间的楔铁机构,斜度在1:50至1:200之间,适应亚微米级的调整量,对准确复位起重要作用,由于消除了各部件之间的累积间隙,跳辊也不易产生,同时也有安全保险作用,防止工作辊直接强力接触而破坏辊面,也是一种最短的应力线结构,消除了整个机架的应变对辊缝控制的影响。
21.在上下辊轴承座处加装辊系承托机构,用于承载上下辊系自重与下落的冲击力,卸载轧制力后,手动或自动调节交叉角很省力,承托机构的结构,采用托轮方式时,滚动摩擦力小,但属于线接触,采用低摩擦材料(例如ptfe)的平面接触,摩擦力相对大一些,可根据实际承重量和交叉角旋转驱动力大小作相应选择。
22.本发明的优点在于实用性强,适用多种规格产品的快速切换即自由轧制,换辊快捷,曲线吻合度可达亚微米级,凸度误差控制精度稳定可靠,响应速度快,板型缺陷从应力不均这个产生的根源上得到了改善,可以去掉液压弯辊装置,简化整机结构,克服了交叉辊轧机存在的缺点和现有技术的不足。
发明内容
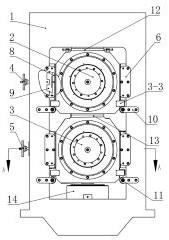
23.附图说明:图1:实施例一 垂直辊轴线方向的视图图2:实施例一 a-a剖面视图图3:实施例一 交叉角调节机构型式一图4:实施例一 交叉角调节机构型式二图5:实施例二 垂直辊轴线方向的视图图6:实施例二 b-b剖面视图图7:实施例二 c-c剖面视图图8: 实施例二 楔铁自动调整机构具体实施方式:以下结合附图实施例对本发明作进一步的详细描述。
24.实施例一:由锂电行业通行的二辊轧机演变而来,主体由机架(1)、上辊系(2)、下辊系(3)、油缸(14)等组成。交叉角调节机构(4)和(5),分别驱动上下辊系旋转,确定的旋转中心由内外圆柱面摩擦副,间隙调整及锁紧功能件组成,楔铁机构、承托机构,共同组成单辊交叉的锂电轧机。
25.上辊系(2)与下辊系(3)的结构基本相同,图2是下辊系a-a剖面,皆由辊(3-1),轴承座(3-2),轴承等构成,固定在上辊系(2)与下辊系(3)轴承座上的外圆柱面(7)与固定在机架(1)上的内圆柱面(8)形成可调交叉角度的上下辊系内外圆柱面摩擦副。燕尾滑块(9)固定在机架(1)上,内圆柱面(8)沿燕尾滑块(9)移动,用于调整内外圆柱面配合间隙,调整好的端板(6)上的圆柱头螺丝顶入位置,用中部起拉杆作用的螺丝锁紧。
26.本例中的交叉角调节机构分为(4)和(5)二种型式,其上的表盘手轮驱动丝杠旋转,通过丝杠头部的球面角接触轴承推动辊两端轴承座(3-2)沿内外圆柱面旋转,因上下辊系的左右两端均安装有交叉角调节机构(4)或(5),调整交叉角的同时,也起到锁定位置的作用。采用上辊系固定,只调节下辊系的交叉角,虽然可简化结构,但沿极片幅宽方向不对称的布局,在交叉角较大时,极片有跑偏的风险,实施例一是按对称交叉设计的。图3与图4
分别是两种不同结构的交叉角调节机构,图3中,手动旋转交叉角调节机构(4)上表盘手轮(4-1),驱动丝杠(4-3)旋转,表盘手轮是标准化的市售件,附着在手轮上的表盘可显示旋转量,丝杠(4-3)上的外螺纹与机架(1)上的内螺纹配合,直线轴承(4-2)固定在机架上,头部球面角接触轴承(4-4)的外球面置于外圆柱面(7)内,内球面空套在丝杠(4-3)的圆柱面上,产生交叉角时,球面角接触轴承的内外球面相对滑移,作为沿旋转半径方向相对位移的浮动件,这种结构适用于辊系没有在线上下方向位移的情况。手动旋转交叉角调节机构(5)中,带座直线轴承(5-2)及丝母(5-3)安装在机架外,丝杠(5-1)旋转,推动置于轴承座(5-5)内的关节轴承(5-4),直线导轨(5-6)固定在内圆柱面(8.1)【比(8)多一凸台,便于直线导轨的安装】,作为旋转半径方向和上下方向适应相对位移的复合运动浮动件,这种结构适用于辊系有在线上下方向位移的情况。
27.上辊系(2)与机架(1)不固定,位于辊系的承重块(3-3)与托轮(11)之间,有微量的上下活动间隙,利于卸载轧制力后,省力地调整交叉角。在上辊轴承座的上方,加装了楔铁机构(12),用于调整上下活动间隙的大小,过大的间隙会造成上辊卸载下落时的冲击力过大,也起到调节上辊系水平度的作用。工作辊之间的楔铁机构(13)的结构与上辊系楔铁机构(12)的结构基本相同,但作用不同,主要用于设定最小辊缝,可以是手动,或加装动力后的自动调节,起安全保险作用,当然也能调节辊两端辊缝的大小或辊水平度。
28.在上下辊系(2)与(3)轴承座处,加装有辊系承托机构,与机架(1)固定的托架(10)上固定的托轮(11)为承托面,与辊系固定的承重块(3-3)为支承面,用于卸载轧制力时承载辊系自重与下落的冲击力,托轮(11)处的滚动摩擦系数小,调整辊交叉角的力不大,可以手动完成。托轮(11)与承重块(3-3)处的间隙,下辊系(3)大于上辊系(2),给引带避让出足够空间的同时,调节交叉角时,油缸(14)与下辊系脱离接触。
29.换辊时,先拆下辊系(3)再拆上辊系(2),用专用吊具吊挂辊颈,将妨碍辊系从辊动力的另一侧抽出的件松开或拆下,落在油缸(14)两侧的轨道上(图中省略),转移至卸辊小车上。
30.实施例二:上支承辊(15)与上工作辊(2)的轴承座联结在一起,下支承辊(16)与下工作辊(3)的轴承座联结在一起,形成成对的对称交叉结构。主体由机架(1)、上支承辊系(15)、上工作辊系(2)、下支承辊系(16)、下工作辊系(3)、油缸(14)等组成。动力执行器(17)分别驱动上下辊系组旋转,确定的旋转中心由内外圆柱面和间隙调整和锁紧机构组成,楔铁机构、承托机构,共同组成四辊锂电轧机,上辊组与下辊组的结构基本相同,图6是立剖面b-b,显示支承辊和工作辊的装配关系,图7是下辊系c-c剖面,皆由辊(16-1),轴承座(16-2),轴承等构成,固定在上支承辊系(15)与下支承辊系(16)轴承座上的外圆柱面(7)与固定在机架(1)上的内圆柱面(8)形成可调交叉角度的上下辊组内外圆柱面摩擦副,在外圆柱面(7)上,镶嵌低摩擦材料或滚动体,以减小摩擦阻力。燕尾滑块(9)固定在机架(1)上,内圆柱面(8)沿燕尾滑块(9)移动,用于调整内外圆柱面配合间隙,调整好的端板(6)上的圆柱头螺丝顶入位置,用中部起拉杆作用的螺丝锁紧。
31.本例中的交叉角调节机构是动力执行器(17),采用的是电动执行器,也可利用轧机已配套的液压站,加装液压执行器,其推力较电动执行器更大,二种执行器类似收放卷纠偏执行器,均有产品供成套选购或定制,由于左右两端的执行器和复合运动需协调动作,位
置传感器种类不同,控制器程序要略作调整。执行器头尾部均安装了关节轴承(业内称鱼眼接头),分别用销轴与机架(1)和上下支承辊轴承座相连结,动力执行器(17)可以沿尾部销轴旋转,头部销轴可以一边推动辊系组旋转,一边上下移动,走一条近似渐开线的路径,动力执行器(17)推动旋转的力是主动的,但在上下运动时,是被动跟随自重伸出,液压缸顶升时回缩;因此,可以借鉴图4的方式,将执行器杆端与轴承座之间,加装直线导轨(图中省略),使复合运动分离,避免程序失误时的强力拉压对执行器造成破坏。电动执行器是自锁的,液压执行器采用锁紧回路或能任意位置锁紧的液压缸,这种结构对沿交叉角调整旋转半径方向和上下方向相对位移的情况都可适应,鱼眼接头与程序控制的复合运动,都可以视为浮动件。因上下辊系的左右两端均安装有动力执行器(17),调整交叉角的同时,也起到锁定位置的作用。采用上辊系组固定,只调节下辊系组的交叉角,虽然可简化结构,但沿极片幅宽方向不对称的布局,在交叉角较大时,极片有跑偏的风险,实施例二是按对称交叉设计的。
32.与实施例一不同的是工作辊之间的楔铁机构(13),采用的交叉角调节机构是伺服电机驱动调整机构(18),弯板(18-4)固定在下工作辊轴承座上,伺服电机(18-1)经减速器(18-2)驱动丝杠(18-3)旋转,推动楔铁机构(13)移动,调整下工作辊轴向水平与最小辊缝的左右一致性。
33.在上下辊系组轴承座处,加装有辊系承托机构,与机架(1)固定的托板(20)为承托面,与轴承固定的承重块(19)为支承面,用于卸载轧制力后承载辊系自重与下落的冲击力,承重块(19)的上表面,镶嵌有低摩擦系数材料(ptfe,巴氏合金等),由于采用了动力驱动旋转,相对滚动摩擦而言,偏大的摩擦力是可以接受的,同时,因辊系组的重量大,面接触利于延长相关零件的使用寿命,上下托板(20)与实施例一基本相同。
34.换辊步骤与实施例一不同之处是上下辊系组分别作为一个整体装卸。
35.实施例一和实施例二中的具体机构是包含但不限于的关系,可以互相通用或借鉴的,具体案例不是对机构应用范围的限定,而是对可能的选择作出的拓展。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1