一种工业焊接机器人的制作方法
1.本发明涉及机器人设备技术领域,具体是一种工业焊接机器人。
背景技术:
2.随着电子技术、计算机技术、数控及机器人技术的发展,焊接机器人从60年代开始用于生产以来,其技术已日益成熟,其代替焊工自动化完成各种焊接任务,一方面使工人的劳动条件得到改善,另一方面,焊接机械手焊接质量稳定且大大提高劳动生产率,工业机器人是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域。
3.目前使用的焊接机器人普遍只能进行定向的往复移动进而对批量的工件进行依次焊接,现有的这种焊接机器人无法对焊枪的焊接位置和焊接角度进行全方位的调整,无法对管件等弧形工件进行焊接。
技术实现要素:
4.本发明的目的在于提供一种工业焊接机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种工业焊接机器人,包括底板,所述底板表面固定安装有固定架,所述固定架为倒u型结构,所述固定架内腔设置有第一固定板,所述固定架表面设置有与第一固定板相连接的升降组件,所述第一固定板下方设置有控制箱,所述控制箱底壁转动安装有焊接枪,所述控制箱内设置有与焊接枪相互配合的角度调节组件,所述第一固定板表面设置有与控制箱相连接的定位机构,所述定位机构包括有横向位移组件与纵向位移组件,所述横向位移组件位于第一固定板表面并且与纵向位移组件相连接,所述纵向位移组件与控制箱相连接。
7.作为本发明进一步的方案:所述升降组件包括有固定架内顶壁与底板之间转动安装的两组相对分布的第一螺纹杆,所述第一螺纹杆与第一固定板螺纹连接,所述第一螺纹杆顶端固定连接有同步齿盘,两组所述同步齿盘共同连接有同步带,一组所述第一螺纹杆顶端延伸出固定架并且连接有第一电机。
8.作为本发明进一步的方案:所述横向位移组件包括有第一固定板底壁向内开设的第一固定槽,所述第一固定槽内固定安装有第二电机,所述第二电机的输出轴固定连接有与第一固定槽侧壁转动连接的第二螺纹杆,所述第二螺纹杆表面螺纹连接有与第一固定槽滑动连接的第一滑动块,所述第一滑动块底端延伸出第一固定槽并且与纵向位移组件相连接。
9.作为本发明进一步的方案:所述纵向位移组件包括有第一滑动块底壁固定安装的第二固定板,所述第二固定板与第一固定板相互垂直,所述第二固定板底壁向内开设有第二固定槽,所述第二固定槽内固定安装有第三电机,所述第三电机的输出轴固定安装有与
第二固定槽侧壁转动连接的第三螺纹杆,所述第三螺纹杆表面螺纹连接有与第二固定槽滑动连接的第二滑动块,所述第二滑动块底壁延伸出第二固定槽并且与控制箱固定连接。
10.作为本发明进一步的方案:所述角度调节组件包括有焊接枪顶端固定安装的位于控制箱内的弧形板,所述弧形板表面固定安装有齿条,所述控制箱内壁固定安装有第四电机,所述第四电机的输出轴固定连接有控制齿盘,所述控制齿盘与齿条啮合连接。
11.作为本发明再进一步的方案:所述底板表面设置有均匀分布的吸盘。
12.与现有技术相比,本发明的有益效果是:通过设置由横向位移组件、纵向位移组件组成的定位机构与角度调节组件相互配合,可以对焊接枪的焊接位置和焊接角度进行全方位的调整,解决了现有的焊接机器人无法对焊枪的焊接位置和焊接角度进行全方位的调整,无法对管件等弧形工件进行焊接的问题。
附图说明
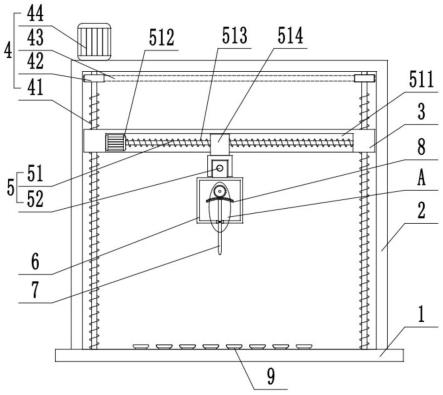
13.图1为本发明实施例中提供的一种工业焊接机器人的结构示意图。
14.图2为图1中a的放大结构示意图。
15.图3为本发明实施例中提供的一种工业焊接机器人中第二固定板及其连接结构示意图。
16.其中:底板1、固定架2、第一固定板3、升降组件4、第一螺纹杆41、同步齿盘42、同步带43、第一电机44、定位机构5、横向位移组件51、第一固定槽511、第二电机512、第二螺纹杆513、第一滑动块514、纵向位移组件52、第二固定板521、第二固定槽522、第三电机523、第三螺纹杆524、第二滑动块525、控制箱6、焊接枪7、角度调节组件8、弧形板81、齿条82、第四电机83、控制齿盘84、吸盘9。
具体实施方式
17.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
18.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
19.以下结合具体实施例对本发明的具体实现进行详细描述。
20.如图1所示,为本发明的一个实施例提供的一种工业焊接机器人的结构图,包括底板1,所述底板1表面固定安装有固定架2,所述固定架2为倒u型结构,所述固定架2内腔设置有第一固定板3,所述固定架2表面设置有与第一固定板3相连接的升降组件4,所述第一固定板3下方设置有控制箱6,所述控制箱6底壁转动安装有焊接枪7,所述控制箱6内设置有与焊接枪7相互配合的角度调节组件8,所述第一固定板3表面设置有与控制箱6相连接的定位机构5,所述定位机构5包括有横向位移组件51与纵向位移组件52,所述横向位移组件51位于第一固定板3表面并且与纵向位移组件52相连接,所述纵向位移组件52与控制箱6相连接,在使用时,当需要对工件进行焊接时,将工件放置在底板1表面,通过升降组件4控制第
一固定板3沿竖直方向上下移动进而使得控制箱6处于合适的焊接高度,所述焊接枪7高度确定后,通过横向位移组件51与纵向位移组件52相互配合可以驱动控制箱6在水平面内进行全方位的移动进而控制焊接枪7与工件表面的待焊接缝处于同一位置,当对管件的弧形面进行焊接时,通过角度调节组件8可以控制焊接枪7的焊接头沿弧线方向旋转进而对管件的弧形面进行高效焊接处理。
21.如图1所示,作为本发明的一种优选实施例,所述升降组件4包括有固定架2内顶壁与底板1之间转动安装的两组相对分布的第一螺纹杆41,所述第一螺纹杆41与第一固定板2螺纹连接,所述第一螺纹杆41顶端固定连接有同步齿盘42,两组所述同步齿盘42共同连接有同步带43,一组所述第一螺纹杆41顶端延伸出固定架2并且连接有第一电机44,在使用时,启动第一电机44带动第一螺纹杆41转动,通过同步齿盘42与同步带43相互配合控制两组第一螺纹杆41同步旋转进而可以便捷的控制第一固定板3沿第一螺纹杆41轴线方向上下移动。
22.如图1所示,作为本发明的一种优选实施例,所述横向位移组件51包括有第一固定板3底壁向内开设的第一固定槽511,所述第一固定槽511内固定安装有第二电机512,所述第二电机512的输出轴固定连接有与第一固定槽511侧壁转动连接的第二螺纹杆513,所述第二螺纹杆513表面螺纹连接有与第一固定槽511滑动连接的第一滑动块514,所述第一滑动块514底端延伸出第一固定槽511并且与纵向位移组件52相连接,在使用时,启动第二电机512带动第二螺纹杆513转动进而推动第一滑动块514在第一固定槽511内沿第二螺纹杆513轴线方向移动,可以便捷的控制焊接枪7在水平面沿横向移动。
23.如图1、图3所示,作为本发明的一种优选实施例,所述纵向位移组件52包括有第一滑动块514底壁固定安装的第二固定板521,所述第二固定板521与第一固定板3相互垂直,所述第二固定板521底壁向内开设有第二固定槽522,所述第二固定槽522内固定安装有第三电机523,所述第三电机523的输出轴固定安装有与第二固定槽522侧壁转动连接的第三螺纹杆524,所述第三螺纹杆524表面螺纹连接有与第二固定槽522滑动连接的第二滑动块525,所述第二滑动块525底壁延伸出第二固定槽522并且与控制箱6固定连接,在使用时,启动第三电机523带动第三螺纹杆524转动进而可以推动第二滑动块525在第二固定槽522内沿第三螺纹杆524轴线方向移动,进而可以控制焊接枪7在水平面沿纵向移动。
24.如图1、图2、图3所示,作为本发明的一种优选实施例,所述角度调节组件8包括有焊接枪7顶端固定安装的位于控制箱6内的弧形板81,所述弧形板81表面固定安装有齿条82,所述控制箱6内壁固定安装有第四电机83,所述第四电机83的输出轴固定连接有控制齿盘84,所述控制齿盘84与齿条82啮合连接,在使用时,当需要调整焊接枪7的焊接角度时,启动第四电机83带动控制齿盘84转动,所述控制齿盘84与齿条82啮合传动进而带动焊接枪7在竖直方向转动进而调整焊接角度。
25.如图1所示,作为本发明的一种优选实施例,所述底板1表面设置有均匀分布的吸盘9,通过吸盘9进一步提高工件放置在底板1表面时的稳定性,避免焊接时产生偏移。
26.本发明的工作原理是:在使用时,当需要对工件进行焊接时,将工件放置在底板1表面,通过升降组件4控制第一固定板3沿竖直方向上下移动进而使得控制箱6处于合适的焊接高度,所述焊接枪7高度确定后,通过横向位移组件51与纵向位移组件52相互配合可以驱动控制箱6在水平面内进行全方位的移动进而控制焊接枪7与工件表面的待焊接缝处于
同一位置,当对管件的弧形面进行焊接时,通过角度调节组件8可以控制焊接枪7的焊接头沿弧线方向旋转进而对管件的弧形面进行高效焊接处理。
27.上面对本发明的较佳实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1