一种自动对接装置
1.本发明属于对接装置领域,具体地说是一种自动对接装置。
背景技术:
2.目前对于一些具有多个大型舱段的产品,例如较大体积的弹药,在舱段对接过程中往往采用人工经验的方式。工人通过视觉对正的方式使用工具调整舱段对接,这对工人的技术水平要求较高,且舱段质量较重会增加工人劳动强度,测量装置的不充分也使得反馈信息较少,造成对接质量差距明显。现有的对接装置往往针对的是小型舱段,对大型舱段对接装置研究较少。
技术实现要素:
3.针对大型舱段人工操作难以实现自动化的问题,本发明的目的在于提供一种针对大型舱段的自动对接装置。
4.本发明的目的是通过以下技术方案来实现的:一种自动对接装置,包括转运agv、固定转载平台、姿态调整平台及若干组配合设置的转载部件及转运小车,各组所述转运小车用于支撑及转运固定舱段、并带动固定舱段与随动舱段完成对接,所述姿态调整平台用于支撑随动舱段、以及对随动舱段进行调姿;所述转运agv的顶端及所述固定转载平台的顶端均沿长度方向设有上方开口的转载部件安装槽,所述转运agv的转载部件安装槽中及所述固定转载平台的转载部件安装槽中分别沿长度方向设有若干组所述转载部件,每组所述转载部件分别带动同组的所述转运小车在所述转运agv或固定转载平台上移动。
5.每组的所述转运小车均包括转运小车主体、旋转基座及用于直接支撑固定舱段的托架a,所述转运小车主体在所述转运agv或固定转载平台上移动,所述托架a设置于所述旋转基座上,所述旋转基座转动安装于所述转运小车主体上,所述旋转基座的转动轴线垂直于水平面。
6.所述转载部件安装槽中均沿长度方向设有齿条及导轨a;每组的所述转运小车上均设有驱动轮;每组的所述转载部件均包括转载部件基板、水平驱动件、升降驱动件a、螺旋升降机a、升降托叉及驱动轮卡接组件,所述转载部件基板上设有与所述导轨a滑动连接的滑块a,所述水平驱动件、升降驱动件a及螺旋升降机a分别安装于所述转载部件基板上,所述水平驱动件的驱动端上安装有与所述齿条啮合的驱动齿轮,所述螺旋升降机a的输入端与所述升降驱动件a的驱动端连接、输出端与所述升降托叉连接,所述驱动轮卡接组件设置于所述升降托叉上、并与所述驱动轮卡接;每组的所述转载部件的驱动轮卡接组件通过卡接的所述驱动轮带动对应组的转运小车移动。
7.所述驱动轮卡接组件包括固定挡板座、锁紧气缸安装座、锁紧气缸及转动挡板,所述固定挡板座及锁紧气缸安装座分别安装于所述升降托叉上,所述固定挡板座上凸设有固
定挡板部,所述转动挡板分为连接在一起的铰接部及转动挡板部,所述锁紧气缸的缸体与所述锁紧气缸安装座铰接,所述锁紧气缸的活塞杆与所述转动挡板的铰接部铰接,所述转动挡板的转动挡板部的左右两侧分别与所述固定挡板座铰接,所述转动挡板的转动挡板部远离所述转动挡板的铰接部的端面与所述固定挡板部之间形成用于卡住所述驱动轮的锁紧导向槽。
8.所述转运agv的顶端及所述固定转载平台的顶端均设有用于盖住所述转载部件安装槽上方开口的罩板,所述罩板开设有供所述驱动轮的轮轴穿过的驱动轮轴导向槽。
9.所述姿态调整平台包括姿态调整平台底座、姿态调整平台滑动座、固定基台、调距滑台及调姿支撑组件;所述姿态调整平台底座上设有用于驱动所述姿态调整平台滑动座沿所述姿态调整平台底座长度方向滑动的轴向驱动件,所述固定基台及所述调距滑台沿所述姿态调整平台底座长度方向依次设置于所述姿态调整平台滑动座上,所述固定基台与所述姿态调整平台滑动座固接,所述姿态调整平台滑动座上设有用于驱动所述调距滑台沿所述姿态调整平台底座长度方向滑动的手动驱动组件,所述固定基台及所述调距滑台上各设有一组所述调姿支撑组件;每组所述调姿支撑组件均包括升降调节机构、径向调节机构、角度调节机构及托架b,所述升降调节机构安装于对应的所述固定基台或调距滑台,所述径向调节机构安装于所述升降调节机构的驱动端,所述角度调节机构安装于所述径向调节机构的驱动端,所述角度调节机构驱动所述托架b绕水平轴线转动。
10.所述手动驱动组件包括设置于所述姿态调整平台滑动座上的丝杠a及导轨b,所述丝杠a的一端连接有手轮,所述调距滑台上设有与所述丝杠a螺纹连接的螺母a,所述调距滑台上还设有与所述导轨b滑动连接的滑块b;所述姿态调整平台底座上设有丝杠b及导轨c,所述丝杠b的一端与所述轴向驱动件的输出端连接,所述姿态调整平台滑动座上有与所述丝杠b螺纹连接的螺母b,所述姿态调整平台滑动座上还设有与所述导轨c滑动连接的滑块c。
11.所述升降调节机构包括升降驱动件b、螺旋升降机b、支撑柱、支撑柱导向座及升降板,所述升降驱动件b、螺旋升降机b及支撑柱导向座分别安装于对应的所述固定基台或调距滑台上,所述升降驱动件b的输出端驱动所述螺旋升降机b的输入端,所述螺旋升降机b的输出端与所述支撑柱的底端连接、并带动所述支撑柱升降,所述支撑柱的顶端穿过所述支撑柱导向座、并与所述升降板连接,所述升降板作为所述升降调节机构的驱动端;所述径向调节机构包括径向调节驱动件、丝杠c、导轨d及径向滑动板,所述径向调节驱动件、丝杠c及导轨d分别安装于所述升降板上,所述径向调节驱动件的输出端与所述丝杠c的一端连接,所述径向滑动板上设有与所述丝杠c螺纹连接的螺母c,所述径向滑动板上还设有与所述导轨d滑动连接的滑块d,所述径向滑动板作为所述径向调节机构的驱动端;所述角度调节机构包括托架b支撑座、角度调节驱动件及蜗轮蜗杆减速机,所述托架b支撑座安装于所述径向滑动板上,所述角度调节驱动件及蜗轮蜗杆减速机分别安装于所述托架b支撑座的内侧,所述蜗轮蜗杆减速机的输入端与所述角度调节驱动件的输出端连接,所述蜗轮蜗杆减速机的输出端与所述托架b连接、并带动所述托架b绕水平轴线转动,
所述托架b支撑座从下侧支撑所述托架b。
12.本发明还包括对正测量部件,所述对正测量部件包括立柱、转臂、测量件安装框架及测量件,所述立柱设置于所述固定转载平台与姿态调整平台的外侧,所述转臂转动安装于所述立柱的顶端,所述测量件安装框架与所述转臂连接,所述测量件安装于所述测量件安装框架上;所述转臂转动、进而带动所述测量件安装框架移动至与所述固定转载平台及姿态调整平台之间的位置相对应处。
13.所述转臂连接有随所述转臂共同旋转的旋转锁定件,所述旋转锁定件通过定位销与所述立柱连接定位。
14.本发明的优点与积极效果为:1、本发明的一种自动对接装置主要功能为实现两舱段体的智能化对接,其中质量较小的舱段为需要进行调姿的随动舱段,另一个为不需要调姿的固定舱段,固定舱段为单舱段或者多舱段组合体。固定舱段可自动转载至固定转载平台上,并与姿态调整平台上的随动舱段完成对接,提高舱段对接转运转载效率及安全性。
15.2、本发明实现了在舱段对接过程中位置姿态的自动测量,自动对接,提高对接操作精度及效率,配置精益化装配操作辅助设施,减少辅助及无用时间,提升装配作业效率。
附图说明
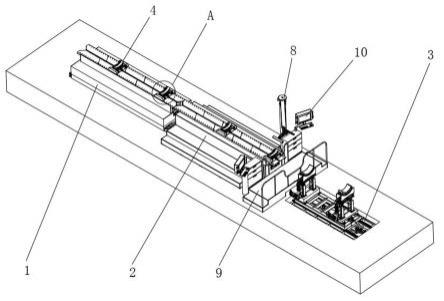
16.图1为本发明的整体结构示意图;图2为图1的a处放大图;图3为本发明的固定转载平台的结构示意图;图4为图3的b处放大图;图5为本发明的转载部件的立体结构示意图;图6为本发明的转载部件的后视结构示意图;图7为本发明的转载部件的侧视结构示意图;图8为本发明的姿态调整平台的结构示意图;图9为图8的c处放大图;图10为本发明的固定基台与调姿支撑组件的设置结构示意图;图11为本发明的对正测量部件的结构示意图;图12为图11的d处放大图。
17.图中:1为转运agv;2为固定转载平台;3为姿态调整平台、301为姿态调整平台底座、302为姿态调整平台滑动座、303为固定基台、304为调距滑台、305为轴向驱动件、306为托架b、307为手轮、308为升降驱动件b、309为螺旋升降机b、310为支撑柱、311为支撑柱导向座、312为升降板、313为径向调节驱动件、314为径向滑动板、315为托架b支撑座、316为角度调节驱动件;4为转运小车、401为转运小车主体、402为旋转基座、403为托架a、404为驱动轮;5为齿条;6为导轨a;701为转载部件基板、702为水平驱动件、703为升降驱动件a、704为螺旋升降机a、705为升降托叉、706为驱动齿轮、707为固定挡板座、708为锁紧气缸安装座、709为锁紧气缸、710为转动挡板、711为罩板、712为竖直导向板;
8为对正测量部件、801为立柱、802为转臂、803为测量件安装框架、804旋转锁定件、805为定位销、806为把手;9为操作踏台;10为操作终端。
具体实施方式
18.下面结合附图1-12对本发明作进一步详述。
19.一种自动对接装置,如图1-12所示,本实施例中包括转运agv1、固定转载平台2、姿态调整平台3及若干组配合设置的转载部件及转运小车4,各组转运小车4用于支撑及转运固定舱段、并带动固定舱段与随动舱段完成对接,姿态调整平台3用于支撑随动舱段、以及对随动舱段进行调姿。本实施例中转运agv1为现有技术,由操作终端10控制动作;固定转载平台2固定于工作地面上。
20.转运agv1的顶端及固定转载平台2的顶端均沿长度方向设有上方开口的转载部件安装槽,转运agv1的转载部件安装槽中及固定转载平台2的转载部件安装槽中分别沿长度方向设有若干组转载部件,每组转载部件分别带动同组的转运小车4在转运agv1或固定转载平台3上移动。
21.具体而言,如图2所示,本实施例中每组的转运小车4均包括转运小车主体401、旋转基座402及用于直接支撑固定舱段的托架a 403,转运小车主体401在转运agv1或固定转载平台2上移动,托架a 403设置于旋转基座402上,旋转基座402转动安装于转运小车主体401上,旋转基座402的转动轴线垂直于水平面。本实施例中转运小车主体401的设置为现有技术。旋转基座402能够相对转运小车主体401绕竖直轴线转动,以便于托架a 403微调角度并稳定支撑固定舱段。
22.具体而言,如图2-7所示,本实施例中转载部件安装槽中均沿长度方向设有齿条5及导轨a 6;每组的转运小车4上均设有驱动轮404,驱动轮404的设置结构为现有技术,驱动轮404的轮轴通过深沟球轴承与转运小车主体401连接;每组的转载部件均包括转载部件基板701、水平驱动件702、升降驱动件a 703、螺旋升降机a 704、升降托叉705及驱动轮卡接组件,转载部件基板701上设有与导轨a 6滑动连接的滑块a,水平驱动件702、升降驱动件a 703及螺旋升降机a 704分别安装于转载部件基板701上,水平驱动件702的驱动端上安装有与齿条5啮合的驱动齿轮706,螺旋升降机a 704的输入端与升降驱动件a 703的驱动端连接、输出端与升降托叉705连接,驱动轮卡接组件设置于升降托叉705上、并与驱动轮404卡接;每组的转载部件的驱动轮卡接组件通过卡接的驱动轮404带动对应组的转运小车4移动。本实施例中转载部件基板701上还设有竖直导向板712,竖直导向板712上设有导轨e,升降托叉705上设有与导轨e滑动连接的滑块e;导轨e及滑块e的设置,可使升降托叉705稳定升降。本实施例中水平驱动件702及升降驱动件a 703分别为现有技术的电机组件,由操作终端10控制动作;螺旋升降机a 704也为市购产品。水平驱动件702驱动驱动齿轮706转动,使转载部件基板701沿着齿条5及导轨a 6移动。升降驱动件a 703通过驱动螺旋升降机a 704,进而带动升降托叉705升降。升降托叉705降下时驱动轮卡接组件可与驱动轮404完全分离,使转运小车4脱离转载部件的驱动。
23.具体而言,如图5-7所示,本实施例中驱动轮卡接组件包括固定挡板座707、锁紧气缸安装座708、锁紧气缸709及转动挡板710,固定挡板座707及锁紧气缸安装座708分别安装
于升降托叉705上,固定挡板座707上凸设有固定挡板部,转动挡板710分为连接在一起的铰接部及转动挡板部,锁紧气缸709的缸体与锁紧气缸安装座708铰接,锁紧气缸709的活塞杆与转动挡板710的铰接部铰接,转动挡板710的转动挡板部的左右两侧分别与固定挡板座707铰接,转动挡板710的转动挡板部远离转动挡板710的铰接部的端面与固定挡板部之间形成用于卡住驱动轮404的锁紧导向槽。本实施例中转动挡板710的铰接部及转动挡板部为一体结构。本实施例中锁紧气缸709为市购产品,由操作终端10控制动作。锁紧气缸709可带动铰接的转动挡板710倾转;锁紧气缸709的活塞杆收缩时,带动转动挡板710向后侧倾转,使驱动轮404便于进入锁紧导向槽中;锁紧气缸709的活塞杆伸出时,带动转动挡板710向前侧倾转,与固定挡板座707的固定挡板部共同夹紧锁紧导向槽中驱动轮404,可使转载部件稳定带动转运小车4移动。转运agv1的顶端及固定转载平台2的顶端均设有用于盖住转载部件安装槽上方开口的罩板711,罩板711开设有供驱动轮404的轮轴穿过的驱动轮轴导向槽。罩板711起到对转载部件安装槽内侧部件保护作用并保证转载部件安装槽内侧清洁,也起到对转运小车4的移动进行导向。
24.具体而言,如图8-10所示,本实施例中姿态调整平台3包括姿态调整平台底座301、姿态调整平台滑动座302、固定基台303、调距滑台304及调姿支撑组件。本实施例中固定基台303与调距滑台304各设置有一个。本实施例中姿态调整平台3设置于工作地面开设的地坑中,使姿态调整平台3上的随动舱段的高度位置与固定转载平台2上的固定舱段的高度位置相对应。
25.姿态调整平台底座301上设有用于驱动姿态调整平台滑动座302沿姿态调整平台底座301长度方向滑动的轴向驱动件305,固定基台303及调距滑台304沿姿态调整平台底座301长度方向依次设置于姿态调整平台滑动座302上,固定基台303与姿态调整平台滑动座302固接,姿态调整平台滑动座302上设有用于驱动调距滑台304沿姿态调整平台底座301长度方向滑动的手动驱动组件,固定基台303及调距滑台304上各设有一组调姿支撑组件。
26.每组调姿支撑组件均包括升降调节机构、径向调节机构、角度调节机构及托架b 306,升降调节机构安装于对应的固定基台303或调距滑台304,径向调节机构安装于升降调节机构的驱动端,角度调节机构安装于径向调节机构的驱动端,角度调节机构驱动托架b 306绕水平轴线转动。
27.具体而言,本实施例中手动驱动组件包括设置于姿态调整平台滑动座302上的丝杠a及导轨b,丝杠a的一端连接有手轮307,调距滑台304上设有与丝杠a螺纹连接的螺母a,调距滑台304上还设有与导轨b滑动连接的滑块b。通过转动手轮307,起到带动调距滑台304移动,进而调节调距滑台304与固定基台303之间距离的作用,用于根据不同长度的随动舱段进行调整。
28.姿态调整平台底座301上设有丝杠b及导轨c,丝杠b的一端与轴向驱动件305的输出端连接,姿态调整平台滑动座302上有与丝杠b螺纹连接的螺母b,姿态调整平台滑动座302上还设有与导轨c滑动连接的滑块c。本实施例中轴向驱动件305为现有技术的电机组件,由操作终端10控制动作。轴向驱动件305带动姿态调整平台滑动座302沿姿态调整平台底座301的长度方向上移动,用于带动随动舱段整体移动。
29.具体而言,本实施例中升降调节机构包括升降驱动件b 308、螺旋升降机b 309、支撑柱310、支撑柱导向座311及升降板312,升降驱动件b 308、螺旋升降机b 309及支撑柱导
向座311分别安装于对应的固定基台303或调距滑台304上,升降驱动件b 308的输出端驱动螺旋升降机b 309的输入端,螺旋升降机b 309的输出端与支撑柱310的底端连接、并带动支撑柱310升降,支撑柱310的顶端穿过支撑柱导向座311、并与升降板312连接,升降板312作为升降调节机构的驱动端。本实施例中升降驱动件b 308为现有技术的电机组件,由操作终端10控制动作;螺旋升降机b 309为市购产品。本实施例中每个升降调节机构设有两组配合设置的螺旋升降机b 309、支撑柱310及支撑柱导向座311,其中一个螺旋升降机b 309具有两个输入端,该螺旋升降机b 309的一个输入端与升降驱动件b 308的输出端连接,该螺旋升降机b 309的另一个输入端与另一个螺旋升降机b 309的输入端通过传动轴连接,升降驱动件b 308同时带动两个螺旋升降机b 309动作;两组的支撑柱310共同支撑升降板312,支撑柱导向座311上设有供支撑柱310穿过的直线轴承,使支撑柱310稳定带动升降板312升降。
30.径向调节机构包括径向调节驱动件313、丝杠c、导轨d及径向滑动板314,径向调节驱动件313、丝杠c及导轨d分别安装于升降板312上,径向调节驱动件313的输出端与丝杠c的一端连接,径向滑动板314上设有与丝杠c螺纹连接的螺母c,径向滑动板314上还设有与导轨d滑动连接的滑块d,径向滑动板314作为径向调节机构的驱动端。本实施例中径向调节驱动件313为现有技术的电机组件,由操作终端10控制动作。径向调节驱动件313带动径向滑动板314沿垂直于随动舱段轴线的方向水平移动,以便于准确与固定舱段对接。
31.角度调节机构包括托架b支撑座315、角度调节驱动件316及蜗轮蜗杆减速机,托架b支撑座315安装于径向滑动板314上,角度调节驱动件316及蜗轮蜗杆减速机分别安装于托架b支撑座315的内侧,蜗轮蜗杆减速机的输入端与角度调节驱动件316的输出端连接,蜗轮蜗杆减速机的输出端与托架b 306连接、并带动托架b 306绕水平轴线转动,托架b支撑座 315从下侧支撑托架b 306。本实施例中角度调节驱动件316为现有技术的电机组件,由操作终端10控制动作;蜗轮蜗杆减速机为市购产品,蜗轮蜗杆减速机与托架b 306之间的连接结构采用现有技术。角度调节驱动件316通过蜗轮蜗杆减速机带动支撑随动舱段的托架b 306绕水平轴线(也即随动舱段轴线)转动,进而实现随动舱段角度位置调节。本实施例中托架b支撑座315转动安装于径向滑动板314,托架b支撑座315相对于径向滑动板314的转动轴线垂直于水平面,进而实现托架b 306的角度微调。
32.具体而言,本实施例中的一种自动对接装置还包括对正测量部件8,对正测量部件8包括立柱801、转臂802、测量件安装框架803及测量件,立柱801设置于固定转载平台2与姿态调整平台3的外侧,转臂802转动安装于立柱801的顶端,测量件安装框架803与转臂802连接,测量件安装于测量件安装框架803上。本实施例中立柱801与转臂802的转动安装结构采用现有技术。转臂802转动、进而带动测量件安装框架803移动至与固定转载平台2及姿态调整平台3之间的位置相对应处。转臂802连接有随转臂802共同旋转的旋转锁定件804,旋转锁定件804通过定位销805与立柱801连接定位,旋转锁定件804及立柱801上分别设有用于穿过定位销805的定位孔。旋转锁定件804上还设有可转动的把手805,方便通过把手805拉动旋转锁定件804,进而拉动转臂802转动。本实施例中测量件安装框架803安装有两个测量件,测量件均为市购的视觉相机,测量件分别与操作终端10。
33.具体而言,本实施例中固定转载平台2与姿态调整平台3之间的工作地面上设有供操作人员站立的操作踏台9,操作终端10设置于操作踏台9上。操作终端10的设置采用现有
技术。操作人员站在操作踏台9上通过测量件给操作终端10的反馈来给姿态调整平台3发送命令,使随动舱段调整位姿以达到最佳对接位置;操作终端10可控制固定转载平台2与姿态调整平台3自动动作,实现随动舱段与固定舱段自动对接。
34.工作原理:使用时,将质量较重的固定舱段通过吊车放置于转运agv1上的转运小车4上,随动舱段放置于姿态调整平台3上,接着转运agv1将固定舱段运送到固定转载平台2附近,通过转载部件及转运小车4的作用将固定舱段运送到固定转载平台2上的转运小车4上;调整对正测量部件8,使测量件可以到达指定位置以进行检测到固定舱段与随动舱段之间的相对状况;接着操作人员在操作踏台9上根据测量件的反馈信息在操作终端10上调整姿态调整平台3动作以调整随动舱段的姿态,接着通过固定转载平台2上的转运小车4缓慢推动固定舱段,使之完成与随动舱段的对接。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1