挖掘机底架物料定位装置和挖掘机底架组装系统的制作方法
本发明涉及机械设备领域,特别涉及用于对挖掘机底架组装部件进行定位的定位装置、用于搬运挖掘机底架组装材料的搬运车以及用于将各挖掘机底架组装材料进行焊接组装的挖掘机底架组装系统。
背景技术:
1、挖掘机底架一般包括位于底部的底层支撑板和位于上部的顶层支撑板,底层支撑板板和顶层支撑板均成x型(因此也称为x架),在底层支撑板和顶层支撑板之间还设置有中间支撑圈,以及位于支撑圈四周的加强筋,在顶层支撑板上还固定有轴承圈。上述各个部分都是单独加工成单个的零部件,因此需要将各个部分组装焊接成一个整体,供组装挖掘机用。
2、现有技术提供的挖掘底架组装技术,一般是通过人工将各个部件依次放置在加工平台上,然后通过人工操作焊接机将各个部分焊接起来。对于加工人员来说,工作强度大,费时费力,加工效率还比较低,加工成本高。
3、因此,在智能制造技术改造的潮流下,设计一套完全自动化的挖掘机底架组装系统,成为了本领域技术人员的一种选择,本领域的技术人员也做了一些尝试,提供了一些解决方案。但是还存在一些问题,其中最主要的就是如何实现在完全无人参与和干预下,机器自动实现对各个零部件的精准定位,从而方便机器将各个零部件准确地放置在对应的位置上,实现挖掘机底架的精准自动化组装。
技术实现思路
1、针对现有自动化的挖掘机底架组装系统存在的上述技术问题,本发明实施例提供了挖掘机物料定位工装以及一种全自动化的挖掘机底架组装系统,通过定位工装上设置的各个物料定位模块,可以实现对各个物料的精确定位,从而方便搬运机器人将各物料准确摆放在总成回转工装上,从而完成对挖掘机底架的全自动化精确加工。
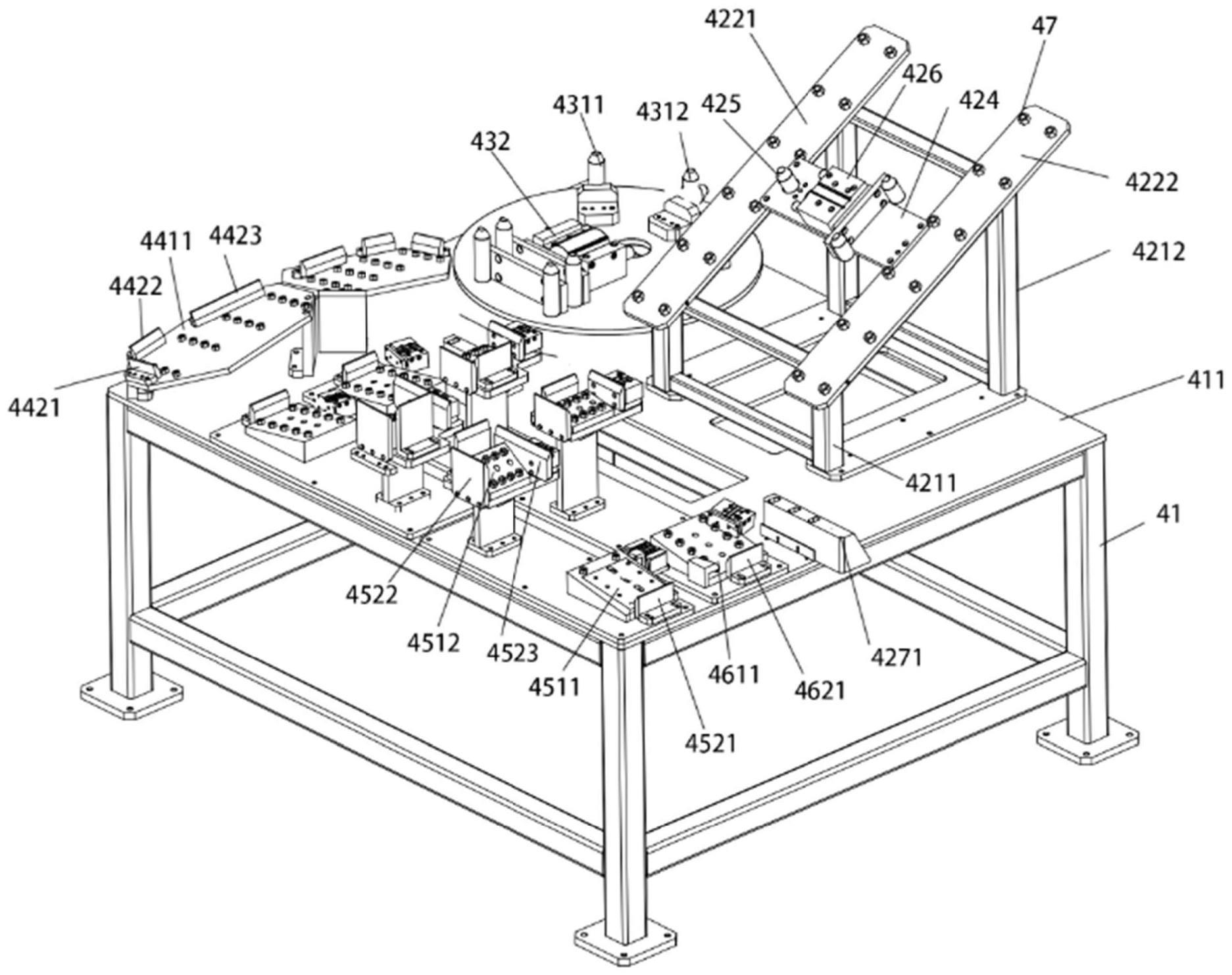
2、本发明第一实施例提供挖掘机底架物料定位工装,包括:
3、物料摆放架,所述物料摆放架包括呈水平面设置的物料摆放台;
4、物料定位组件:所述物料定位组件设置在所述物料摆放台上,所述物料定位组件包括:
5、用于确定底层支撑板以及顶层支撑板的中心位置和朝向的支撑板定位模块;
6、用于确定中间支撑圆环的中心和朝向、以及轴承环中心位置的圆环定位模块;
7、用于确定第一加强筋位置和朝向的第一加强筋定位模块、第二加强筋位置和朝向的第二加强筋定位模块、第三加强筋位置和朝向的第三加强筋定位模块。
8、本技术实施例提供的挖掘机底架物料定位工装,通过在物料摆放台上分别设置用于确定底层支撑板以及顶层支撑板的中心位置和朝向的支撑板定位模块;用于确定中间支撑圆环的中心和朝向、以及轴承环中心位置的圆环定位模块;用于确定第一加强筋位置和朝向的第一加强筋定位模块、第二加强筋位置和朝向的第二加强筋定位模块、第三加强筋位置和朝向的第三加强筋定位模块。使得搬运机器人可以将物料搬运车上已经按一定顺序和方位摆放的物料,分别通过抓手抓取到各自定位模块上,各定位模块可以精确确定出对应物料的方向和位置,搬运机器人再次将物料搬运到组装回转平台上时,就可以精确确定好相互之间的摆放位置,从而在将挖掘机底架组装系统改造成无人化的全自动系统下,在不需要人工干预的情况下,能精确实现挖掘机底架的精细组装,达到更好的组装效果。
9、本技术提供的一个优选实施例中,分别设置朝向相反的第一加强筋定位模块两组,朝向相反的第二加强筋定位模块两组和朝向相反的第三加强筋定位模块两组。本技术提供的挖掘机底架组装系统,通过设置两台搬运机器人,每台搬运机器人对应设置一套定位工装,两台搬运机器人分工合作只搬运部分零部件,如第一台搬运机器人定位并搬运底层支撑板,然后第二搬运机器人定位并搬运中间支撑圆环,然后两台机器人分别定位搬运一部分加强筋放置在底层支撑板和中间支撑圆环之间,最后第二搬运机器人定位并搬运顶层支撑板,第一搬运机器人定位并搬运轴承环,两台搬运机器人分工合作,达到最有效的定位搬运工作。在这个过程中,由于两台搬运机器人处在回转平台的两侧。因此定位工装在确定加强筋的方向和位置时,需要刚好相反。因此本技术优选实施方式中,设置方向刚好相反的两套第一加强筋定位模块、第二加强筋定位模块第三加强筋定位模块,使得一台搬运机器人就可以同时将所有的挖掘机底架物料都摆放到回转加工平台上。这样,虽然会影响加工的效率,但是,当一台搬运机器人出现故障需要维护修理的时候,另一台机器人则可以完全继续工作,使得整个组装系统还能继续工作。
10、本技术提供的一个优选实施例中,所述支撑板定位模块包括第一立柱和第二立柱,所述第一立柱和第二立柱均垂直设置在所述物料摆放台上,且所述第一立柱和第二立柱按预设距离设置,所述第二立柱的高度大于所述第一立柱高度,使得从所述第二立柱的顶面至所述第一立柱顶面形成预设的角度;还包括第一斜板和第二斜板,所述第一斜板和第二斜板平行设置在所述第一立柱和第二立柱的顶面之间,所述第一斜板和第二斜板的斜板面形成用于放置挖掘机底架的支撑面,所述斜板面上设置有滚珠。
11、还包括横板,所述横板设置在第一斜板和第二斜板之间且与所述斜板面平行;所述横板上设置有用于确定挖掘机底板中心孔边缘的第一定位柱,以及第一驱动装置,所述第一驱动装置可相对所述第一定位柱靠近或远离运动;
12、还包括设置在所述物料摆放台面上的第一定位块和第二定位块,所述第一定位块用于抵靠所述底层支撑板或者顶层支撑板的第一端脚,所述第二定位块用于抵靠所述底层支撑板或者顶层支撑板的第二端脚,从而用于确定第一端脚和第二端脚的位置。
13、本技术提供的一个优选实施例中,所述圆环定位模块包括呈同心圆设置第二定位柱、第三定位柱和第四定位柱,所述第三定位柱位于第二定位柱和第四定位柱之间,所述第三定位柱的远离同心圆圆心的侧面上设置有第五定位柱,所述第五定位柱的远离所述第三定位柱侧面的一端设置有圆台面;
14、还包括第二驱动装置,所述第二驱动装置设置在所述同心圆与所述第三定位柱确定的连线上,所述第二驱动装置可相对于所述第三定位柱靠近或远离运动。
15、本技术提供的一个优选实施例中,所述第一加强筋定位模块包括第一定位板面,所述第一定位板面与所述物料摆放台面呈预设角度设置,所述第一定位板面上设置有滚珠;在所述第一定位板面靠近所述物料摆放台面一侧分别设置第三定位块和第四定位块,所述第三定位块和第四定位块内侧面呈直角设置,在所述第一定位板面靠近所述物料摆放台一侧还设置有用于与第一加强筋一侧边抵靠的第五定位块。
16、本技术提供的一个优选实施例中,所述第二加强筋定位模块包括第二定位板和第三定位板,所述第二定位板和第三定位板均与所述物料摆放台面呈预设角度设置,且所述第三定位板板面的倾斜角度大于所述第二定位板板面的倾斜角度,所述第二定位板和第三定位板的板面倾斜方向相同,所述第三定位板的板面距离物料摆放台的距离大于所述第二定位板的板面距离物料摆放台的距离,在所述第二定位板远离所述第三定位板一侧设置有第六定位块,在所述第三定位板斜面两侧设置有第七定位块和第八定位块,所述第七定位块和第八定位块的相对内侧面平行,所述第八定位块上连接有第三驱动装置,所述第三驱动装置用于驱动所述第八定位块相对于所述第七定位块做靠近或远离运动;所述第二定位板和第三定位板板面上设置有滚珠。
17、本技术提供的一个优选实施例中,所述第三加强筋定位模块包括第四定位板和第五定位板,所述第四定位板和第五定位板均与所述物料摆放台面呈预设角度设置,且所述第五定位板板面的倾斜角度小于所述第四定位板板面的倾斜角度,所述第四定位板和第五定位板的板面倾斜方向相同,所述第五定位板的板面距离物料摆放台的距离大于所述第四定位板的板面距离物料摆放台的距离,在所述第四定位板远离所述第五定位板一侧设置有第九定位块,在所述第五定位板斜面两侧设置有第十定位块和第十一定位块,所述第十定位块和第十一定位块的相对内侧面平行,所述第十一定位块上连接有第四驱动装置,所述第四驱动装置用于驱动所述第十一定位块相对于所述第十定位块做靠近或远离运动;所述第四定位板和所述第五定位板的板面上设置有滚珠。
18、本技术实施例提供的挖掘机底架组装系统,包括:
19、三轴伺服桁架,所述三轴伺服桁架上设置有桁架抓手;所述桁架抓手用于将组装好的挖掘机底架从总成回转工装转移至挖掘机底架输送线;
20、挖掘机底架输送线,用于将组装好的挖掘机底架送离所述组装系统或输送至下一加工位;
21、设置在三轴伺服桁架抓手活动区域内的总成回转工装,所述总成回转工装上设置有用于放置底架物料的回转平台,用于将各挖掘机底架物料焊接组装的焊接机器人,以及用于驱动回转平台按预设角度旋转的驱动子系统;
22、分别设置在以回转平台和三轴伺服桁架确定的加工中心轴线两侧的第一搬运机器人和第二搬运机器人,针对每一侧设置的搬运机器人,分别设置有搬运抓手切换放置架,所述搬运抓手切换放置架上放置有适用于抓取底层支撑板、支撑顶板、中间支撑圆环、轴承环的第一抓手;适用于抓取第一加强筋、第二加强筋和第三加强筋的第二抓手;
23、针对每一侧设置的搬运机器人,分别设置上述的挖掘机底架物料定位工装;
24、用于将物料搬运到搬运机器人活动范围内的物料搬运车。
25、本技术实施例提供的挖掘机底架组装系统,实现了无人干预的全自动加工生产系统,同时由于采用了定位工装,以及为搬运机器人配置了两套搬运抓手,使得搬运机器人可以根据不同的物料,更换不同的抓手,并通过搬运抓手抓取相应的物料,将物料放置在定位工装的对应位置,对相应物料的朝向和位置进行定位,然后再通过搬运机器人将对应物料按定位好的朝向和位置搬运到回转加工平台上,从而实现了在组装加工过程中的零部件精准定位安装。
26、本技术提供的一个优选实施例中,所述物料搬运车包括第一物料搬运车和第二物料搬运车;
27、所述第一物料搬运车包括搬运车物料摆放架,所述搬运车物料摆放架上分别设置有第一加强筋摆放定位模块、第二加强筋摆放定位模块、第三加强筋摆放定位模块、支撑顶板摆放定位模块和中间支撑圆环摆放定位模块;
28、所述第二物料搬运车包括搬运车物料摆放架,所述搬运车物料摆放架上分别设置有第一加强筋摆放定位模块、第二加强筋摆放定位模块、第三加强筋摆放定位模块、底层支撑板摆放定位模块和轴承环摆放定位模块;
29、在每一个搬运车物料摆放架底部设置有agv小车,所述agv小车用于抬起并搬运所述搬运车物料摆放架。
30、本技术提供的一个优选实施例中,还包括对应每一侧搬运机器人分别设置的搬运车固定模块,所述搬运车固定模块针对物料搬运车的四个支撑脚分别设置四个固定座,每个固定座包括用于对固定座进行固定定位的固定件,以及设置在固定件上,用于与搬运车支持脚端面截面缩小的方台对应设置的截面缩小的方槽。
- 还没有人留言评论。精彩留言会获得点赞!