3D视觉寻边及随动测高的激光头的制作方法
3d视觉寻边及随动测高的激光头
技术领域
1.本实用新型涉及激光切割机技术领域,具体地说,涉及一种3d视觉寻边及随动测高的激光头。
背景技术:
2.现有切割设备的激光切割头不能随着切割产品高度变化而变化,用固定图纸切割。当产品高度的变化,会导致切割焦距变化,切割效果变差。产品变形时,切割位置不准确。
技术实现要素:
3.本实用新型的目的在于提供一种3d视觉寻边及随动测高的激光头,自动调节高度,且能自动识别产品的边缘轮廓。
4.本实用新型公开的3d视觉寻边及随动测高的激光头所采用的技术方案是:
5.一种3d视觉寻边及随动测高的激光头,包括激光切割头、相机组件、位移传感器,以及驱动激光切割头、相机组件、位移传感器升降的升降驱动件,所述相机组件用于对产品的边缘轮廓进行自动识别,所述激光切割头用于发射激光,并使激光聚焦形成聚焦点,所述位移传感器具有一测量光束,所述聚焦点在测量光束的路径上,或者靠近测量光束的路径。
6.作为优选方案,所述位移传感器倾斜于激光切割头的光路设置。
7.作为优选方案,所述升降驱动件具有可升降的滑板,所述滑板上固定设有用于固定激光切割头的激光头固定板,所述激光头固定板一侧固定测距支架,所述测距支架具有一倾斜面,所述位移传感器固定于倾斜面上。
8.作为优选方案,所述激光切割头包括聚焦镜,激光的聚焦点为聚焦镜的焦点。
9.作为优选方案,所述升降驱动件安装于固定板,所述固定板上固定有反射镜安装支架,所述反射镜安装支架上设有反射镜,所述反射镜处于聚焦镜正上方。
10.作为优选方案,所述激光切割头包括向上延伸的调节内筒,所述调节内筒可伸缩的伸入位于反射镜安装支架上的防尘管内。
11.作为优选方案,所述相机组件包括ccd相机、连接于ccd相机的工业镜头,以及处于工业镜头下方的光源。
12.本实用新型公开的3d视觉寻边及随动测高的激光头的有益效果是:位移传感器通过测量光束测量激光切割头的聚焦点与产品的距离。测量出来的数据实时反馈给控制系统。控制系统根据数据,控制升降驱动件带动激光切割头、相机组件、位移传感器上下移动,使得激光切割头发射的激光和产品保持固定的距离。同时相机组件对产品的边缘轮廓进行自动识别,不需要图纸精准对位切割。
附图说明
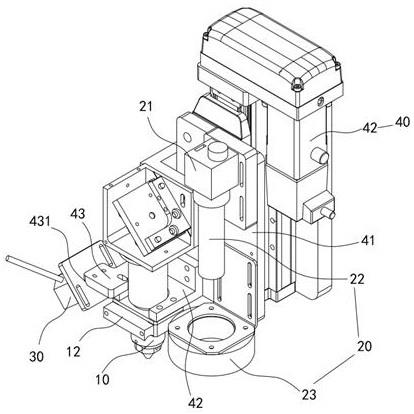
13.图1是本实用新型3d视觉寻边及随动测高的激光头的结构示意图;
14.图2是本实用新型3d视觉寻边及随动测高的激光头的另一视角的结构示意图;。
15.图3是本实用新型3d视觉寻边及随动测高的激光头的正视图。
具体实施方式
16.下面结合具体实施例和说明书附图对本实用新型做进一步阐述和说明:
17.请参考图1,一种3d视觉寻边及随动测高的激光头,包括激光切割头10、相机组件20、位移传感器30,以及驱动激光切割头10、相机组件20、位移传感器30升降的升降驱动件40。
18.所述相机组件20用于对产品的边缘轮廓进行自动识别,所述激光切割头10用于发射激光,并使激光聚焦形成聚焦点,所述位移传感器30具有一测量光束,所述聚焦点在测量光束的路径上,或者靠近测量光束的路径。
19.位移传感器30通过测量光束测量激光切割头10的聚焦点与产品的距离。测量出来的数据实时反馈给控制系统。控制系统根据数据,控制升降驱动件40带动激光切割头10、相机组件20、位移传感器30上下移动,使得激光切割头10发射的激光和产品保持固定的距离。同时相机组件20对产品的边缘轮廓进行自动识别,不需要图纸精准对位切割。
20.需要注意的是,在实施时会使测量光束小幅侧向偏移,以避让激光光路。
21.其中,所述升降驱动件40具有可升降的滑板41,所述激光切割头10、相机组件20、位移传感器30固定设于滑板41。
22.所述升降驱动件40还包括伺服电机42、丝杠以及丝杠螺母,所述丝杠螺母固定连接滑板41,伺服电机42驱动丝杠旋转,从而带动丝杠螺母和滑板41升降。
23.请参考图2,所述位移传感器30倾斜于激光切割头10的光路设置。具体的,所述升降驱动件40具有可升降的滑板41,所述滑板41上固定设有用于固定激光切割头10的激光头固定板42,所述激光头固定板42一侧固定测距支架43,所述测距支架43具有一倾斜面431,所述位移传感器30固定于倾斜面431上。
24.所述激光切割头10包括聚焦镜,激光的聚焦点为聚焦镜的焦点,图1中,聚焦镜设置在聚焦镜架12内。所述升降驱动件40安装于固定板44,所述固定板44上固定有反射镜安装支架45,所述反射镜安装支架45上设有反射镜46,所述反射镜46处于聚焦镜正上方。
25.请参考图3,所述激光切割头10包括向上延伸的调节内筒11,所述调节内筒11可伸缩的伸入位于反射镜安装支架45上的防尘管47内。
26.请参考图1,所述相机组件20包括ccd相机21、连接于ccd相机21的工业镜头22,以及处于工业镜头22下方的光源23。
27.最后应当说明的是,以上实施例仅用以说明本实用新型的技术方案,而非对本实用新型保护范围的限制,尽管参照较佳实施例对本实用新型作了详细地说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的实质和范围。
技术特征:
1.3d视觉寻边及随动测高的激光头,其特征在于,包括激光切割头、相机组件、位移传感器,以及驱动激光切割头、相机组件、位移传感器升降的升降驱动件,所述相机组件用于对产品的边缘轮廓进行自动识别,所述激光切割头用于发射激光,并使激光聚焦形成聚焦点,所述位移传感器具有一测量光束,所述聚焦点在测量光束的路径上,或者靠近测量光束的路径。2.如权利要求1所述的3d视觉寻边及随动测高的激光头,其特征在于,所述位移传感器倾斜于激光切割头的光路设置。3.如权利要求2所述的3d视觉寻边及随动测高的激光头,其特征在于,所述升降驱动件具有可升降的滑板,所述滑板上固定设有用于固定激光切割头的激光头固定板,所述激光头固定板一侧固定测距支架,所述测距支架具有一倾斜面,所述位移传感器固定于倾斜面上。4.如权利要求1所述的3d视觉寻边及随动测高的激光头,其特征在于,所述激光切割头包括聚焦镜,激光的聚焦点为聚焦镜的焦点。5.如权利要求4所述的3d视觉寻边及随动测高的激光头,其特征在于,所述升降驱动件安装于固定板,所述固定板上固定有反射镜安装支架,所述反射镜安装支架上设有反射镜,所述反射镜处于聚焦镜正上方。6.如权利要求5所述的3d视觉寻边及随动测高的激光头,其特征在于,所述激光切割头包括向上延伸的调节内筒,所述调节内筒可伸缩的伸入位于反射镜安装支架上的防尘管内。7.如权利要求1所述的3d视觉寻边及随动测高的激光头,其特征在于,所述相机组件包括ccd相机、连接于ccd相机的工业镜头,以及处于工业镜头下方的光源。
技术总结
本实用新型公开了一种3D视觉寻边及随动测高的激光头,包括激光切割头、相机组件、位移传感器,以及驱动激光切割头、相机组件、位移传感器升降的升降驱动件,所述相机组件用于对产品的边缘轮廓进行自动识别,所述激光切割头用于发射激光,并使激光聚焦形成聚焦点,所述位移传感器具有一测量光束,所述聚焦点在测量光束的路径上,或者靠近测量光束的路径。本实用新型提供的3D视觉寻边及随动测高的激光头,自动调节高度,且能自动识别产品的边缘轮廓。且能自动识别产品的边缘轮廓。且能自动识别产品的边缘轮廓。
技术研发人员:周首斌
受保护的技术使用者:深圳市镭射源科技有限公司
技术研发日:2022.01.19
技术公布日:2022/6/20
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1