数控机床用自动化环保收料装置
1.本实用新型涉及收料装置技术领域,尤其涉及数控机床用自动化环保收料装置。
背景技术:
2.收料装置是将待加工工件送装到机床上的加工位置和将已加工工件从加工位置取下的自动或半自动机械装置,又称工件自动装卸装置。
3.现有的收料装置在使用过程中,难以进行有效的将收料与导流进行有效的结合,导致构造复杂难以进行操作等问题,因此,本实用新型提出数控机床用自动化环保收料装置以解决现有技术中存在的问题。
技术实现要素:
4.本实用新型提出数控机床用自动化环保收料装置,该数控机床用自动化环保收料装置主要是利用桁架构件进行对丝杆吊臂的支撑起来,而且两组丝杆吊臂是平行的分布状态,以形成吸附机构与导流机构,使得吸附机构能够将产品进行吸附操作,满足少量产品的取料装卸,并且导流机构在使用时,能够满足较大批量产品的导流操作,起到导流产品装载收料的效果,不会造成设备构造复杂,达到操作简便的效果。
5.本实用新型通过以下技术方案实现:
6.数控机床用自动化环保收料装置,包括基座构件和吸附机构,所述基座构件上设置有动力组件,所述基座构件的边侧设置有螺栓装配的桁架构件,且所述桁架构件的顶部底侧设置有螺栓装配且相互平行分布的吸附机构与导流机构;
7.所述吸附机构包括第一丝杆臂、第一螺纹杆、滑块、第一气缸、第一推杆、气缸盘、侧推杆、活动条、泵体座、气泵和真空吸盘,所述第一丝杆臂螺栓连接在所述桁架构件的顶部底侧,所述第一丝杆臂上通过第一螺纹杆螺纹连接滑块,且所述滑块的下方设置有第一气缸,所述第一气缸的输出端连接有第一推杆,且所述第一推杆的下方设置有气缸盘,所述气缸盘的边侧设置有侧推杆,且所述侧推杆的一端铰链连接有活动条,所述活动条一端铰链连接有泵体座,且所述泵体座的上方设置有气泵,所述泵体座的下方设置有真空吸盘。
8.进一步,所述第一气缸与第一推杆和气缸盘的中轴线处于同一直线上,所述侧推杆以气缸盘的中轴线环形等角度分布三组,所述活动条与泵体座的中轴线环形等角度分布三组。
9.进一步改进于,所述基座构件包括减压垫、底框、侧架、护板和斜板,所述减压垫的上方设置有底框,且所述底框的上方设置有四组侧架,所述侧架的内侧设置有护板,所述侧架的一侧设置有斜板。
10.进一步改进于,所述动力组件包括电动机、传动轴、传动轮、皮带轮、轴承座、辊杆和输送带,所述电动机设置在所述底框的一端顶侧,所述电动机的输出端连接有传动轴,所述传动轴贯穿所述侧架连接有传动轮,且所述传动轮通过皮带传动连接有皮带轮,所述皮带轮的输出端贯穿所述侧架连接有轴承座,所述轴承座与辊杆轴承连接,且所述辊杆的外
侧设置有滚动连接的输送带。
11.进一步改进于,所述桁架构件包括螺栓基板、固定基座、高架柱和横杆,所述螺栓基板螺栓连接在所述侧架的外侧,所述螺栓基板的一侧设置有固定基座,且所述固定基座的上方设置有高架柱,所述高架柱的顶端设置有横杆。
12.进一步改进于,所述导流机构包括第二丝杆臂、第二螺纹杆、螺纹块、第二推杆、第二气缸、电动旋转座、旋转条和导流条,所述第二丝杆臂设置在所述横杆的的顶部底侧且平行于第一丝杆臂,所述第二丝杆臂的底侧设置有两组第二螺纹杆,所述第二螺纹杆螺纹连接有螺纹块,所述螺纹块的下方通过第二推杆连接有第二气缸的输出端,所述第二气缸的下方设置有电动旋转座,所述电动旋转座的输出端连接有旋转条,且所述旋转条的下方设置有导流条。
13.有益效果
14.本实用新型利用桁架构件进行对丝杆吊臂的支撑起来,而且两组丝杆吊臂是平行的分布状态,以形成吸附机构与导流机构,使得吸附机构能够将产品进行吸附操作,满足少量产品的取料装卸,并且导流机构在使用时,能够满足较大批量产品的导流操作,起到导流产品装载收料的效果,不会造成设备构造复杂,达到操作简便的效果。
附图说明
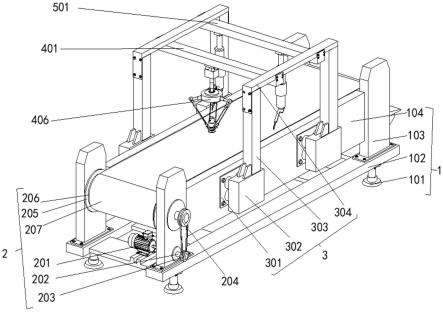
15.图1为本实用新型的立体结构示意图;
16.图2为本实用新型的侧视立体结构示意图;
17.图3为本实用新型的吸附机构立体结构示意图;
18.图4为本实用新型的导流机构立体结构示意图。
19.其中:1、基座构件;101、减压垫;102、底框;103、侧架;104、护板;105、斜板;2、动力组件;201、电动机;202、传动轴;203、传动轮;204、皮带轮;205、轴承座;206、辊杆;207、输送带;3、桁架构件;301、螺栓基板;302、固定基座;303、高架柱;304、横杆;4、吸附机构;401、第一丝杆臂;402、第一螺纹杆;403、滑块;404、第一气缸;405、第一推杆;406、气缸盘;407、侧推杆;408、活动条;409、泵体座;4010、气泵;4011、真空吸盘;5、导流机构;501、第二丝杆臂;502、第二螺纹杆;503、螺纹块;504、第二推杆;505、第二气缸;506、电动旋转座;507、旋转条;508、导流条。
具体实施方式
20.为了加深对本实用新型的理解,下面将结合附图及实施例对本实用新型方案做进一步详述,本实施例仅用于解释本实用新型,并不构成对本实用新型保护范围的限定。
21.根据图1-4所示,本实施例提出了一种数控机床用自动化环保收料装置,包括基座构件1和吸附机构4,基座构件1上设置有动力组件2,基座构件1的边侧设置有螺栓装配的桁架构件3,且桁架构件3的顶部底侧设置有螺栓装配且相互平行分布的吸附机构4与导流机构5;
22.吸附机构4包括第一丝杆臂401、第一螺纹杆402、滑块403、第一气缸404、第一推杆405、气缸盘406、侧推杆407、活动条408、泵体座409、气泵4010和真空吸盘4011,第一丝杆臂401螺栓连接在桁架构件3的顶部底侧,第一丝杆臂401上通过第一螺纹杆402螺纹连接滑块
403,且滑块403的下方设置有第一气缸404,第一气缸404的输出端连接有第一推杆405,且第一推杆405的下方设置有气缸盘406,气缸盘406的边侧设置有侧推杆407,且侧推杆407的一端铰链连接有活动条408,活动条408一端铰链连接有泵体座409,且泵体座409的上方设置有气泵4010,泵体座409的下方设置有真空吸盘4011。第一气缸404与第一推杆405和气缸盘406的中轴线处于同一直线上,侧推杆407以气缸盘406的中轴线环形等角度分布三组,活动条408与泵体座409的中轴线环形等角度分布三组。
23.本实施例中,当产品在输送带207的运行下,到达第一丝杆臂401的垂直方向下时,这时启动第一螺纹杆402输出动力带动滑块403运行到产品的上方,之后第一气缸404输出动力带动第一推杆405运行到收料的高度,由于气缸盘406的外侧设置环形分布的三组侧推杆407,这样在侧推杆407与活动条408的相互作用下能够将活动条408一端的泵体座409放置在取料产品的高度,使得泵体座409下方的真空吸盘4011贴合上取料的产品,启动气泵4010抽取真空吸盘4011贴合产品之间的空气,从而形成真空,接着启动第一螺纹杆402使得产品在吸附机构4各个组件的作用下到达装载的位置进行有效的卸载产品,达到收料的效果。
24.基座构件1包括减压垫101、底框102、侧架103、护板104和斜板105,减压垫101的上方设置有底框102,且底框102的上方设置有四组侧架103,侧架103的内侧设置有护板104,侧架103的一侧设置有斜板105。
25.本实施例中,在减压垫101的上方设置底框102,使得底框102能够支撑侧架103将设备放置在加工的地点,起到支撑的效果。
26.动力组件2包括电动机201、传动轴202、传动轮203、皮带轮204、轴承座205、辊杆206和输送带207,电动机201设置在底框102的一端顶侧,电动机201的输出端连接有传动轴202,传动轴202贯穿侧架103连接有传动轮203,且传动轮203通过皮带传动连接有皮带轮204,皮带轮204的输出端贯穿侧架103连接有轴承座205,轴承座205与辊杆206轴承连接,且辊杆206的外侧设置有滚动连接的输送带207。
27.本实施例中,首先启动电动机201输出动力带动输出端的传动轴202进行转动,这样传动轴202带动传动轮203运行,使得传动轮203利用皮带带动皮带轮204高速的转动,接着皮带轮204将动力通过输出端传递到轴承座205的内侧使得辊杆206运行,从而带动辊杆206外侧的输送带207运行,当输送带207运行时,将加工完成的物料放置在上方随着输送带207进行运动。
28.桁架构件3包括螺栓基板301、固定基座302、高架柱303和横杆304,螺栓基板301螺栓连接在侧架103的外侧,螺栓基板301的一侧设置有固定基座302,且固定基座302的上方设置有高架柱303,高架柱303的顶端设置有横杆304。
29.本实施例中,固定基座302在螺栓基板301的作用下能够将组件牢固的固定在侧架103的外侧,并且固定基座302的上方设置有高架柱303,使得高架柱303便于用户进行组装横杆304以起到支撑的效果。
30.导流机构5包括第二丝杆臂501、第二螺纹杆502、螺纹块503、第二推杆504、第二气缸505、电动旋转座506、旋转条507和导流条508,第二丝杆臂501设置在横杆304的的顶部底侧且平行于第一丝杆臂401,第二丝杆臂501的底侧设置有两组第二螺纹杆502,第二螺纹杆502螺纹连接有螺纹块503,螺纹块503的下方通过第二推杆504连接有第二气缸505的输出
端,第二气缸505的下方设置有电动旋转座506,电动旋转座506的输出端连接有旋转条507,且旋转条507的下方设置有导流条508。
31.本实施例中,当物料较多时,利用两组第二螺纹杆502输出动力带动螺纹块503运行的收料的调节位置,之后启动第二气缸505输出动力使得第二推杆504伸长,让电动旋转座506运行的收料的高度,接着启动电动旋转座506输出动力带动旋转条507运行到适合导流条508作业的角度停止,在两组导流条508的作用下,产品依次通过导流条508的作用从输送带207一端输送设备,在侧架103一侧的斜板105导流下进行装载完成设备的作业。
32.该数控机床用自动化环保收料装置的工作原理是:首先启动电动机201输出动力带动输出端的传动轴202进行转动,这样传动轴202带动传动轮203运行,使得传动轮203利用皮带带动皮带轮204高速的转动,接着皮带轮204将动力通过输出端传递到轴承座205的内侧使得辊杆206运行,从而带动辊杆206外侧的输送带207运行,当输送带207运行时,将加工完成的物料放置在上方随着输送带207进行运动,当物料较多时,利用两组第二螺纹杆502输出动力带动螺纹块503运行的收料的调节位置,之后启动第二气缸505输出动力使得第二推杆504伸长,让电动旋转座506运行的收料的高度,接着启动电动旋转座506输出动力带动旋转条507运行到适合导流条508作业的角度停止,在两组导流条508的作用下,产品依次通过导流条508的作用从输送带207一端输送设备,在侧架103一侧的斜板105导流下进行装载完成设备的作业,当产品在输送带207的运行下,到达第一丝杆臂401的垂直方向下时,这时启动第一螺纹杆402输出动力带动滑块403运行到产品的上方,之后第一气缸404输出动力带动第一推杆405运行到收料的高度,由于气缸盘406的外侧设置环形分布的三组侧推杆407,这样在侧推杆407与活动条408的相互作用下能够将活动条408一端的泵体座409放置在取料产品的高度,使得泵体座409下方的真空吸盘4011贴合上取料的产品,启动气泵4010抽取真空吸盘4011贴合产品之间的空气,从而形成真空,接着启动第一螺纹杆402使得产品在吸附机构4各个组件的作用下到达装载的位置进行有效的卸载产品,达到收料的效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1