一种汽车天窗玻璃螺丝锁紧系统的制作方法
1.本实用新型涉及汽车天窗玻璃锁紧技术领域,具体涉及一种汽车天窗玻璃螺丝锁紧系统。
背景技术:
2.汽车天窗安装于车顶,能够有效地使车内空气流通,增加新鲜空气的进入,同时汽车车窗也可以开阔视野以及移动摄影摄像的拍摄需求,汽车天窗可大致分为:外滑式、内藏式、内藏外翻式、全景式和窗帘式等,主要安装于商用suv、轿车等车型上。
3.现阶段国内外行业的常规技术是汽车天窗的玻璃锁紧为人工取钉放钉,手持扭矩枪进行锁紧。这种现象的缺点为:
①
狭小空间作业,人员疲劳度高;
②
狭小空间人工判断孔位,容易出现滑丝等质量问题;
③
工业自动化程度低。
技术实现要素:
4.本实用新型提供了一种汽车天窗玻璃螺丝锁紧系统,解决了以上所述的技术问题。
5.本实用新型解决上述技术问题的方案如下:
6.一种汽车天窗玻璃螺丝锁紧系统,包括料架、限位座、移位龙门架、上料工位、振动上料盘和工业机器人,所述限位座的一侧放置有料架,所述料架上托放有玻璃板,所述限位座的上方架设有移位龙门架,所述移位龙门架上滑动安装有上料夹具,所述限位座的一侧位于上料夹具的下方架设有上料工位,所述上料工位的两侧安装有振动上料盘,所述上料工位的下方安装有工业机器人,所述上料工位背离上料夹具的一端两侧安装有显示屏和触控屏。
7.本实用新型的有益效果是:振动上料盘通过震动盘及上料槽排列螺丝,当取钉位没有螺丝时,通过上料气缸下降至上料槽位置,振动上料盘使用吹气方式把螺丝吹入取钉位,传感器检测到有螺丝后气缸上升,完成螺丝排列,之后工业机器人取出螺丝,之后工业机器人把工业摄像头移动至天窗框架的螺丝孔位位置,进行拍照,拍照后视觉程序处理图片,确定螺丝孔位具体位置,再把位置信息发送给工业机器人,机器人收到视觉系统发送的位置后,启动扭矩枪程序,并通过弹性批头进行螺丝锁紧;弹性批头装置中间内置弹簧,当弹性批头前端受力时,弹性批头可以伸缩,有效解决了机器人打螺丝时受到的反力,进而达到通过协作机器人进行玻璃螺丝锁紧,工业自动化程度高,且使用视觉系统时螺丝打的更精准,解决滑丝问题的效果。
8.在上述技术方案的基础上,本实用新型还可以做如下改进。
9.进一步,所述限位座的顶端安装有限位架和固定气缸,所述限位架和固定气缸之间安装有第一缓冲座和到位开关,所述限位座的一侧安装有安全光栅。
10.采用上述进一步方案的有益效果是:当上料工位空闲时,使用者将玻璃板转移至限位座上时,通过第一缓冲座对玻璃板进行弹性支撑,同时玻璃板阻挡到位开关,到位开关
被触发,到位开关发送电信号至电磁阀,将固定气缸接通外部气源,固定气缸伸出对玻璃板进行夹持固定,且当玻璃板转移至限位座上时,会触发安全光栅,当安全光栅被触发时,装置自动停机,进而增加装置安全性。
11.进一步,所述移位龙门架设有丝杠和滑轨,所述上料夹具通过丝杠和滑轨滑动安装在移位龙门架上。
12.采用上述进一步方案的有益效果是:上料夹具夹紧玻璃板之后通过丝杠带动进行横向滑动,并通过滑轨进行导向,进而增加玻璃板转移的准确性。
13.进一步,所述上料夹具设有升降气缸,所述升降气缸的输出端安装有第一夹紧气缸,所述第一夹紧气缸的底端安装有夹头,所述上料夹具位于第一夹紧气缸的下方安装有定位架和第二缓冲座。
14.采用上述进一步方案的有益效果是:通过夹头对玻璃板进行夹持固定,通过定位架使夹头与玻璃板精准对接,并通过第二缓冲座对玻璃板进行缓冲。
15.进一步,所述上料工位通过第二夹紧气缸对天窗框架夹持固定,且上料工位的两侧设有限位块,天窗框架通过限位块限位在上料工位上。
16.采用上述进一步方案的有益效果是:防止玻璃板安装在天窗框架上时,天窗框架移位。
17.进一步,所述振动上料盘设有振动盘,所述振动盘的出料端安装有上料槽,所述上料槽的末端安装有上料气缸。
18.采用上述进一步方案的有益效果是:通过振动盘振动下料,并通过上料气缸将螺丝送至工业机器人取料位。
19.进一步,所述工业机器人的末端安装有工业相机和弹性批头。
20.采用上述进一步方案的有益效果是:工业机器人通过工业摄像头确定螺丝孔位具体位置,并通过弹性批头进行螺丝锁紧,弹性批头装置中间内置弹簧,当弹性批头前端受力时,弹性批头可以伸缩,有效解决了机器人打螺丝时受到的反力,解决滑丝问题。
21.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。本实用新型的具体实施方式由以下实施例及其附图详细给出。
附图说明
22.此处所说明的附图用来提供对本实用新型的进一步理解,构成本技术的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
23.在附图中:
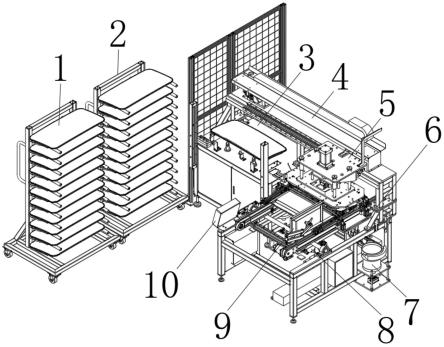
24.图1为本实用新型的斜视外观示意图;
25.图2为本实用新型的限位座斜视外观示意图;
26.图3为本实用新型的上料夹具斜视外观示意图;
27.图4为本实用新型的工业机器人斜视外观示意图;
28.图5为本实用新型的振动上料盘斜视外观示意图;
29.图6为本实用新型的上料工位斜视外观示意图。
30.附图中,各标号所代表的部件列表如下:
31.1、玻璃板;2、料架;3、限位座;4、移位龙门架;5、上料夹具;6、上料工位;7、振动上料盘;8、工业机器人;9、显示屏;10、触控屏;31、安全光栅;32、限位架;33、第一缓冲座;34、到位开关;35、固定气缸;41、丝杠;42、滑轨;51、升降气缸;52、夹头;53、第一夹紧气缸;54、定位架;55、第二缓冲座;61、天窗框架;62、第二夹紧气缸;71、振动盘;72、上料槽;73、上料气缸;81、工业相机;82、弹性批头。
具体实施方式
32.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。在下列段落中参照附图以举例方式更具体地描述本实用新型。根据下面说明和权利要求书,本实用新型的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本实用新型实施例的目的。
33.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
34.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
35.请参阅图1至图6所示,本实用新型提供的实施例:
36.一种汽车天窗玻璃螺丝锁紧系统,包括料架2、限位座3、移位龙门架4、上料工位6、振动上料盘7和工业机器人8,限位座3的顶端安装有限位架32和固定气缸35,限位架32和固定气缸35之间安装有第一缓冲座33和到位开关34,限位座3的一侧安装有安全光栅31,当上料工位6空闲时,使用者将玻璃板1转移至限位座3上时,通过第一缓冲座33对玻璃板1进行弹性支撑,同时玻璃板1阻挡到位开关34,到位开关34被触发,到位开关34发送电信号至电磁阀,将固定气缸35接通外部气源,固定气缸35伸出对玻璃板1进行夹持固定,且当玻璃板1转移至限位座3上时,会触发安全光栅31,当安全光栅31被触发时,装置自动停机,进而增加装置安全性,限位座3的一侧放置有料架2,料架2上托放有玻璃板1,限位座3的上方架设有移位龙门架4,移位龙门架4设有丝杠41和滑轨42。
37.移位龙门架4上滑动安装有上料夹具5,上料夹具5通过丝杠41和滑轨42滑动安装在移位龙门架4上,上料夹具5夹紧玻璃板1之后通过丝杠41带动进行横向滑动,并通过滑轨42进行导向,进而增加玻璃板1转移的准确性,上料夹具5设有升降气缸51,升降气缸51的输出端安装有第一夹紧气缸53,第一夹紧气缸53的底端安装有夹头52,通过夹头52对玻璃板1进行夹持固定,通过定位架54使夹头52与玻璃板1精准对接,并通过第二缓冲座55对玻璃板1进行缓冲,上料夹具5位于第一夹紧气缸53的下方安装有定位架54和第二缓冲座55,限位座3的一侧位于上料夹具5的下方架设有上料工位6,上料工位6通过第二夹紧气缸62对天窗
框架61夹持固定,且上料工位6的两侧设有限位块,天窗框架61通过限位块限位在上料工位6上,防止玻璃板1安装在天窗框架61上时,天窗框架61移位,上料工位6的两侧安装有振动上料盘7,振动上料盘7设有振动盘71,振动盘71的出料端安装有上料槽72,上料槽72的末端安装有上料气缸73,通过振动盘71振动下料,并通过上料气缸73将螺丝送至工业机器人8取料位,上料工位6的下方安装有工业机器人8,振动上料盘7通过震动盘及上料槽72排列螺丝,当取钉位没有螺丝时,通过上料气缸73下降至上料槽72位置,振动上料盘7把螺丝吹入取钉位,振动上料盘7上也可架设气枪,通过气枪将螺丝吹入取钉位,传感器检测到有螺丝后气缸上升,完成螺丝排列,之后工业机器人8取出螺丝,之后工业机器人8把工业摄像头移动至天窗框架61的螺丝孔位位置,进行拍照,拍照后视觉程序处理图片,确定螺丝孔位具体位置,再把位置信息发送给工业机器人8,机器人收到视觉系统发送的位置后,启动扭矩枪程序,并通过弹性批头82进行螺丝锁紧;弹性批头82装置中间内置弹簧,当弹性批头82前端受力时,弹性批头82可以伸缩,有效解决了机器人打螺丝时受到的反力,进而达到通过协作机器人进行玻璃螺丝锁紧,工业自动化程度高,且使用视觉系统时螺丝打的更精准,解决滑丝问题的效果,工业机器人8的末端安装有工业相机81和弹性批头82,工业机器人8通过工业摄像头确定螺丝孔位具体位置,并通过弹性批头82进行螺丝锁紧,弹性批头82装置中间内置弹簧,当弹性批头82前端受力时,弹性批头82可以伸缩,有效解决了机器人打螺丝时受到的反力,解决滑丝问题,上料工位6背离上料夹具5的一端两侧安装有显示屏9和触控屏10。
38.基于实施例1的一种汽车天窗玻璃螺丝锁紧系统在使用时:振动上料盘7通过震动盘及上料槽72排列螺丝,当取钉位没有螺丝时,通过上料气缸73下降至上料槽72位置,振动上料盘7使用吹气方式把螺丝吹入取钉位,传感器检测到有螺丝后气缸上升,完成螺丝排列,之后工业机器人8取出螺丝,之后工业机器人8把工业摄像头移动至天窗框架61的螺丝孔位位置,进行拍照,拍照后视觉程序处理图片,确定螺丝孔位具体位置,再把位置信息发送给工业机器人8,机器人收到视觉系统发送的位置后,启动扭矩枪程序,并通过弹性批头82进行螺丝锁紧;弹性批头82装置中间内置弹簧,当弹性批头82前端受力时,弹性批头82可以伸缩,有效解决了机器人打螺丝时受到的反力,进而达到通过协作机器人进行玻璃螺丝锁紧,工业自动化程度高,且使用视觉系统时螺丝打的更精准,解决滑丝问题的效果。
39.以上所述,仅为本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制;凡本行业的普通技术人员均可按说明书附图所示和以上所述而顺畅地实施本实用新型;但是,凡熟悉本专业的技术人员在不脱离本实用新型技术方案范围内,利用以上所揭示的技术内容而做出的些许更动、修饰与演变的等同变化,均为本实用新型的等效实施例;同时,凡依据本实用新型的实质技术对以上实施例所作的任何等同变化的更动、修饰与演变等,均仍属于本实用新型的技术方案的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1