一种拉床辅助送料装置的制作方法
1.本实用新型属于机床技术领域,具体涉及一种拉床辅助送料装置。
背景技术:
2.目前,随着产线自动化改造得到进一步普及,新工厂的建设更多是向数字工厂,无人化工厂看齐,机床的销售模式也从传统的单机销售变成与自动化集成厂家合作打包出售,自动化已成为基础配备,但现存的大部分传统车间为劳动密集型模式,主要靠人工完成上下料,部分机床不具备自动化条件,这部分机床空间狭小,机器人手爪无法直接进入机床完成换料动作。
3.在立式拉床的自动化改造中,存在立式拉床因需让刀缘故,取料位和放料位不同,取料位空间较大,机器人可完成,但放料位零件与拉刀下沿距离较近,机器人手爪无法进入的问题。
技术实现要素:
4.本实用新型的目的在于提供一种拉床辅助送料装置,以克服现有技术的不足。
5.一种拉床辅助送料装置,包括送料部件、支架、底座和电气盒,送料部件包括连接板,连接板一侧固定连接有过渡板,连接板一侧设置有一级气缸,过渡板通过第一浮动接头连接有一级气缸,连接板上方设置有二级气缸,二级气缸连接有第二浮动接头,二级气缸通过第二浮动接头连接有v形块,v形块上固定连接有导向杆,连接板一侧端部固定连接有对接板,连接板下方设有底板,连接板与底板之间设置有滑动装置,送料部件的底板与支架上端相连,支架下端固定连接在底座的支撑板上,电气盒固定连接在支架的侧面。
6.进一步的,一级气缸通过锁紧螺母连接在气缸角座上,气缸角座固定连接在底板上。
7.进一步的,连接板上固定连接有安装板,安装板上固定有直线轴承和二级气缸,安装板上开有通孔。
8.进一步的,直线轴承上安装有导向杆,直线轴承上开有与导向杆截面形状相同的通孔。
9.进一步的,连接板上固定有拖链连接板,拖链连接板的前端与连接板固定连接,拖链连接板的后端与拖链连接。
10.进一步的,底板上开有与支架固定连接用的通孔。
11.进一步的,底座包括底架,底架上固定安装有第二线规、限位块和定位销孔板。
12.进一步的,第二线规上方设有第二滑块,第二滑块上开有与第二线规宽度相同的凹槽,第二滑块与上方的支撑板固定连接。
13.进一步的,支撑板上开有定位销孔和固定连接用的通孔。
14.进一步的,底架一侧固定有空心调整螺杆,空心调整螺杆下方设有垫块,空心调整螺杆套设在地脚螺杆上。
15.与现有技术相比,本实用新型具有以下有益的技术效果:
16.本实用新型一种拉床辅助送料装置,本技术通过一级气缸带动与浮动接头相连接的过渡板,进而带动连接板在底板上滑动,对接板固定连接在连接板的一端,从而使对接板与机床上料位对接,物料置于对接板上,通过二级气缸与导向杆推动v形块,完成上料过程,本装置通过与机器人取料的配合使用,让自动上下料成为可能,可代替人工,节省了人力,同时极大的降低了劳动强度;在换料过程中,机器人取完料后可直接进行下一道工序的上下料,由辅助送料机构完成送料动作,节省了机器人换料时间,提高了效率。
17.优选的,底座为可移动式设计,为自动上料及人工换刀提供了便利。
附图说明
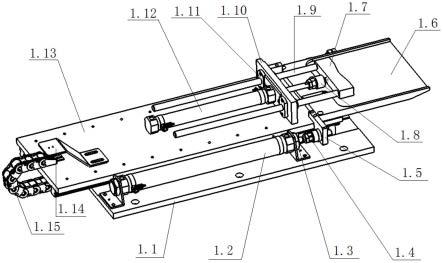
18.图1为本实用新型实施例中拉床辅助送料装置结构图。
19.图2为本实用新型实施例中拉床辅助送料装置送料部件上部结构图。
20.图3为本实用新型实施例中拉床辅助送料装置送料部件下部结构图。
21.图4为本实用新型实施例中拉床辅助送料装置底座结构图。
22.图中,1、送料部件;2、支架;3、底座;4、电气盒;1.1、底板;1.2、一级气缸;1.3、气缸角座;1.4、第一浮动接头;1.5、过渡板;1.6、对接板; 1.7、v型块;1.8、第二浮动接头;1.9、导向杆;1.10、安装板;1.11、直线轴承;1.12、二级气缸;1.13、连接板;1.14、拖链连接板;1.15、拖链;1.16、第一线规;1.17、第一滑块;3.1、垫块;3.2、地脚螺杆;3.3、锁紧扁螺母; 3.4、空心调整螺杆;3.5、压紧螺母;3.6、底架;3.7、第二滑块;3.8、第二线规;3.9、限位块;3.10、定位销;3.11、支撑板;3.12、定位销孔板。
具体实施方式
23.为了使本技术领域的人员更好地理解本实用新型方案,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分的实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本实用新型保护的范围。
24.如图1、图2、图3所示,一种拉床辅助送料装置,包括送料部件1,送料部件1包括连接板1.13,连接板1.13一侧固定连接有过渡板1.5,连接板1.13 一侧设置有一级气缸1.2,一级气缸1.2上设有第一浮动接头1.4,过渡板1.5 通过第一浮动接头1.4连接有一级气缸1.2,连接板1.13上方设置有二级气缸 1.12,二级气缸1.12上设有第二浮动接头1.8,二级气缸1.12通过第二浮动接头1.8与v形块1.7连接,v形块1.7上固定连接有导向杆1.9,连接板1.13 一侧端部固定连接有对接板1.6,连接板1.13下方设有底板1.1,连接板1.13 与底板1.1之间设置有滑动装置,送料部件1的底板1.1与支架2上端相连,支架2下端固定连接在底座3的支撑板3.11上,电气盒4固定连接在支架2 的侧面,具体的,过渡板通过m5*20螺栓安装在连接板上,导向杆通过m6*20 螺栓与v形块相连,对接板通过m6*20螺栓安装在连接板上,连接板1.13背侧设置有第一线规1.16,第一滑块1.17固定连接在底板1.1上,滑块通过m5*15 螺栓安装在底板1.1上,第一线规1.16通过m5*20螺栓安装在连接板1.13上,本技术通过一级气缸1.2带动过渡板1.5进而带动连接板1.13运动,使对接板 1.6与机床上料位
对接,二级气缸1.12与导向杆1.9推动v形块1.7运动,完成送料过程,通过与机器人取料的配合使用,让自动上下料成为可能,可代替人工,节省了人力,同时极大的降低了劳动强度;在换料过程中,机器人取完料后可直接进行下一道工序的上下料,由辅助送料机构完成送料动作,节省了机器人换料时间,提高了效率。
25.如图2所示,一级气缸1.2通过锁紧螺母连接在气缸角座1.3上,气缸角座1.3固定连接在底板1.1上,具体的,一级气缸1.2通过第一浮动接头1.4 与过渡板1.5连接,通过气缸角座1.3将一级气缸1.2固定在底板1.1上,气缸角座1.3与底板1.1之间可以通过m6*10螺栓连接。
26.如图1、图2所示,连接板1.13上固定连接有安装板1.10,安装板1.10 上固定有直线轴承1.11和二级气缸1.12,安装板1.10上开有通孔,具体的,安装板1.10通过m5*15螺栓安装在连接板1.13上,二级气缸1.12通过m6*15 螺栓安装在安装板1.10上,直线轴承1.11通过m4*15螺栓安装在安装板1.10 上。
27.如图1、图2所示,直线轴承1.11上安装有导向杆1.9,直线轴承1.11上开有与导向杆1.9截面形状相同的通孔具体的,导向杆1.9位于二级气缸1.12 的两侧,导向杆1.9穿过直线轴承1.11与v形块1.7相连,对v形块1.7起推动及导向作用。
28.如图1、图2所示,连接板1.13上固定有拖链连接板1.14,拖链连接板 1.14的前端与连接板1.13固定连接,拖链连接板1.14的后端与拖链1.15连接,具体的,拖链连接板1.14前端通过m5*10螺栓固定在连接板1.13的后端,后端与拖链1.15连接,用于将装置控制线路归纳,避免杂乱的线路影响装置的正常工作,第一线规1.16固定在连接板1.13的背侧,第一线规1.16与第一滑块 1.17相配合使得连接板1.13可以在一级气缸1.2的带动下滑动,此外,送料部件1的底板1.1与支架2的上端固定连接。
29.如图1、图4所示,底座3包括底架3.6,底架3.6上固定安装有第二线规 3.8、限位块3.9和定位销孔板3.12,第二线规3.8上方设有第二滑块3.7,第二滑块3.7上开有与第二线规3.8宽度相同的凹槽,第二滑块3.7与上部的支撑板3.11固定连接,具体的,第二线规3.8通过m5*20螺栓安装在底架3.6 相对的两侧边上,第二滑块3.7通过m5*15螺栓与支撑板3.11相连,定位销孔板3.12通过焊接固定在底架3.6上。
30.如图1、图4所示,支撑板3.11上开有定位销孔和固定连接用的通孔,具体的,定位销3.10通过支撑板3.11插入定位销孔板3.12上,进而对拉床辅助送料装置进行限位固定,保证装置在工作时不会沿着第二线规3.8滑动,支撑板3.11通过m8*15螺栓安装在支架2下方。
31.如图1、图4所示,底架3.6安装有空心调整螺杆3.4,空心调整螺杆3.4 下方设有垫块3.1,空心调整螺杆3.4套设在地脚螺杆3.2上。具体的,底架 3.6四角位置均安装有空心调整螺杆3.4,所述空心调整螺杆3.4采用型号为 m36*1,锁紧扁螺母3.3采用型号为m36*1,安装在空心调整螺杆3.4上,地脚螺杆3.2型号为m20*2,穿过空心调整螺杆3.4,上端安装压紧螺母3.5,采用型号为m20*2,装置通过四角位置的地脚螺杆进行固定,底座3可通过拧动空心调整螺杆3.4使底座3上下移动进行调平。
32.具体的,底座3通过拧动空心调整螺杆3.4使底座3上下移动来调平,调平后通过拧紧锁紧扁螺母3.3来锁紧,不发生相对位置变化;地脚螺杆3.2穿过空心调整螺杆3.4,通过化学地锚固定在地面上,通过上紧压紧螺母3.5来完全固定。
33.具体的,本辅助送料装置可与机器人配合,用于生产线的自动化改造中,其具体实施过程如下;
34.上料前,支架2位于底座3的左端,如图1所示,一级气缸1.2、二级气缸1.12均处于收回状态,如图2所示,机器人手爪将上料零件放至对接板1.6 上,等待上料。
35.换料过程,机床加工完成,自动门开,机器人手爪取机床加工完零件至下料道,一级气缸1.2伸出,通过第一浮动接头1.4带动过渡板进而带动连接板 1.13运动,对接板1.6与连接板1.13连接,推动对接板1.6向前,完成对接板 1.6与机床上料位对接,二级气缸1.12伸出,通过第二浮动接头、导向杆1.9 推动v形块1.7向前,并保持稳定,v型块1.7将零件推至机床上料位,上料完成。
36.上料后,一级气缸1.2收回,二级气缸1.12收回,拉床辅助送料机构恢复初始状态,等待进行下一个送料循环。
37.具体的,本装置进行人工换刀的操作过程如下;
38.首先,使装置停止工作,将定位销3.10从定位销孔板3.12拔出,装置通过第二滑块3.7沿着第二线规3.8滑动;然后推动支架2至底座3右端限位块 3.9,人处于机床前完成换刀操作;最后,换刀完成后,将支架2推回底座3 左端,定位销3.10插入定位销孔板3.12中,重新对装置进行固定。
39.以上内容仅为说明本实用新型的技术思想,不能以此限定本实用新型的保护范围,凡是按照本实用新型提出的技术思想,在技术方案基础上所做的任何改动,均落入本实用新型权利要求书的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1