一种探伤结构、钻机专用钻头焊接设备及焊接方法与流程
本发明涉及钻头焊接,具体为一种探伤结构、钻机专用钻头焊接设备及焊接方法。
背景技术:
1、钻机专用钻头焊接设备通常用于焊接大型的钻头,包括油井钻头、煤矿钻头和水泥钻头等。该设备通常由以下主要部分组成:主体框架、动力系统、焊接头夹紧机构、焊接机构和安全措施组成,该设备的探伤结构通常采用超声波探伤技术和射线探伤技术,用于检测焊缝的质量和缺陷情况,焊接方法有多种,其中最常用的是氩弧焊接和电阻焊接。氩弧焊接利用氩气保护焊缝,保证焊接质量,而电阻焊接则利用焊接材料的电阻加热达到焊接目的,总体来说,钻机专用钻头焊接设备是一种非常重要的工具,它可以保证钻头的质量和性能,为工程和建设等领域提供了有力支持。
2、在现有技术中,钻头的使用寿命受几方面影响,钻头长时间使用后,焊接部分容易断裂或塑性变形,这可能导致钻头生命短暂或无法继续使用,裂纹、气孔等缺陷会对钻头的耐磨性和使用寿命产生负面影响,所以如何消除焊接缺陷、优化设备、焊接过程质量控制等措施可以有效提高钻头焊接质量和使用寿命,是急需考虑的问题。
3、因此,不满足现有的需求,对此我们提出了一种探伤结构、钻机专用钻头焊接设备及焊接方法。
技术实现思路
1、本发明的目的在于提供一种探伤结构、钻机专用钻头焊接设备及焊接方法,以解决上述背景技术中提出的钻头的使用寿命受几方面影响,钻头长时间使用后,焊接部分容易断裂或塑性变形,这可能导致钻头生命短暂或无法继续使用,裂纹、气孔等缺陷会对钻头的耐磨性和使用寿命产生负面影响问题。
2、为实现上述目的,本发明提供如下技术方案:
3、第一方面,提出探伤结构,包括承载位移结构,沿所述承载位移结构进行横向位移的探伤组件,所述探伤组件与承载位移结构配合对焊接后的钻头工件进行扫描探伤动作。
4、通过安装探伤组件和承载位移结构,探伤组件可以用于检测钻头焊接的缺陷,采用超声波探伤、x射线探伤等技术可以对钻头焊接部分进行全面的检测,发现并记录异常情况,从而减少钻头使用中因焊接部分失效而导致的危险和损失,同时承载位移结构能够使得探伤组件的可调性得到保障,与实际探伤位置调节需求适配,可以在生产线上或维修中对钻头的质量进行的全面监控,保障实用性。
5、在上述实施例中,所述承载位移结构包括:与地面通过脚栓固定的承载主杆,焊接固定所述承载主杆远离脚栓的一端内侧的转动滑杆架,与所述转动滑杆架连接、沿其周向转动的配合承载架,螺接固定于所述配合承载架下方的滑动位移架,所述配合承载架下方安装有滑轨,所述滑动位移架与滑轨滑动连接带动探伤组件整体进行横向位移。
6、承载主杆通过脚栓固定到地面,可以提供钻头焊接探伤装置的支撑和稳定,固定在承载主杆远离脚栓的一端内侧的转动滑杆架可以在其周向转动,并与配合承载架连接,从而支持探伤组件的横向移动,在配合承载架下方安装有滑轨,滑动位移架与它们进行滑动连接,探伤组件则安装于该滑动位移架上,从而可以通过驱动滑动位移架做到整体的横向位移,可以为钻头的焊接探伤提供支撑和横向移动,从而可以更准确地检测焊接部位的质量和缺陷,提高钻头的安全性能和使用寿命。
7、在上述实施例中,所述探伤组件包括:衔接于滑动位移架下方、与其转动连接的转动连接架,连接于所述转动连接架远离滑轨的一端的角度调节架,与所述角度调节架螺接、具有自伸缩性的延伸杆,与所述延伸杆远离所述角度调节架的一端固定、进行探伤扫描工作的探伤头,所述转动连接架三百六十度转动带动探伤头转动,对焊接后的钻头工件进行全方位扫描。
8、通过在滑动位移架下方连接一个转动连接架,使探测头可以360度转动,对焊接后的钻头工件进行全方位扫描,安装角度调节架,可以通过调整探测头的扫描角度来适应不同角度的钻头焊接工件,延伸杆具有自伸缩性,可以为探测头提供足够的长度,便于在钻头工件的深处进行准确的探测扫描,在钻头焊接探测的过程中,可以通过驱动滑动位移架和转动连接架让探测头对焊接后的钻头进行全方位的扫描,并通过控制角度调节架和延伸杆的位置,可以调整探测头扫描的角度和长度,从而更加精确地对焊接部位进行检测,钻头焊接探测可以更加全面、精确、迅速地完成,真正实现对钻头焊接质量的全面检测和控制,保证钻头的安全性能和使用寿命。
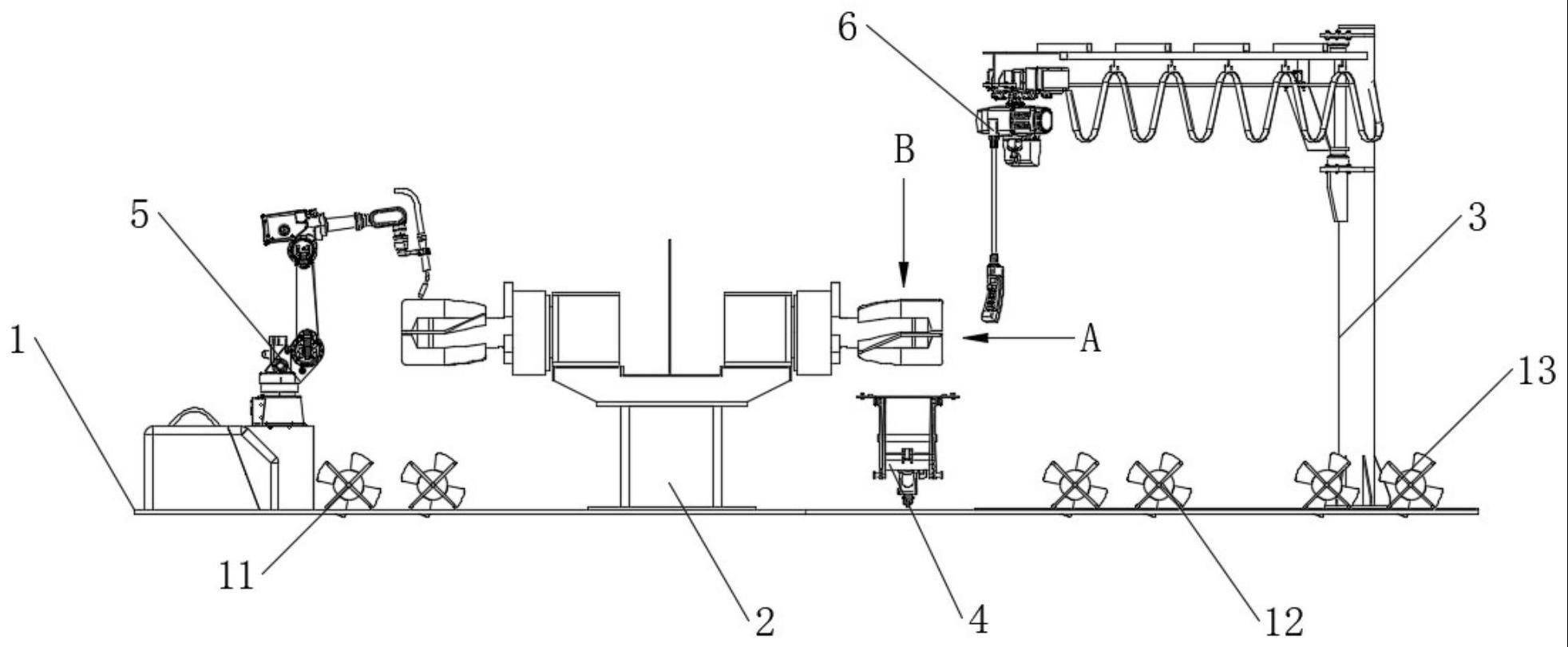
9、第二方面,提出一种钻机专用钻头焊接设备,包括提供探伤结构以及焊接组件安装工作区域的焊接平台,设置于所述焊接平台中心位置、带动钻头工件进行变位的配合承载结构,与所述焊接换位结构位置相对、对钻头工件进行焊接的焊接机器人,所述焊接换位结构设置有两个工位,待焊接钻头工件在一侧工位焊接,焊接完成后换位进行检测动作。
10、通过安装有焊接平台、配合承载结构和焊接机器人,先将待焊接的钻头工件放置在一个工位上,让焊接机器人对其进行焊接操作,完成后让钻头工件移动到另一个工位上进行检测操作,可以有效提高钻头工件的生产效率和质量,并减少焊接过程中出现的缺陷和错误的可能性。
11、在上述实施例中,所述焊接换位结构包括:工作承载台,设置于所述工作承载台与焊接平台接触端的定位基板,设置于所述工作承载台远离所述定位基板的一端的换位承载架,卡接固定于所述换位承载架中间位置处的隔板,沿所述换位承载垂直中心线相对设置有两个的夹持结构,所述换位承载和工作承载台之间安装有转动连接座,所述转动连接座带动换位承载架进行三百六十度转动。
12、通过安装有工作承载台、定位基板、换位承载架、隔板、夹持结构和转动连接座,转动连接座带动换位承载架和夹持结构整体进行转动,可以进行钻头工件的更换,但是无需整体移动,能够提升焊接换位的工作效率,并且能够有效减小损耗。
13、在上述实施例中,所述夹持结构包括:与所述换位承载架螺接、内部形成空腔的夹持定位台架,固定于所述夹持定位台架远离隔板的一端的三爪卡盘。
14、通过三爪卡盘进行钻头工件焊接的固定动作,定位的紧密性以及灵活度都得到了更好的保障。
15、在上述实施例中,所述焊接机器人包括:焊接定位基座,与所述焊接定位基座通过转动座转动连接的传动机械臂,与所述传动机械臂转动连接的配合机械臂,形成于所述配合机械臂一端、具有自伸缩性的延伸轴,固定于所述延伸轴远离所述配合机械臂的一端的组件加装架,通过电动转轴固定于所述组件安装架上的焊接头。
16、通过安装有焊接定位基座、传动机械臂、配合机械臂、延伸轴、组件加装架和焊接头,焊接定位基座保障整体工作时,不会移动或摇晃,从而保证焊接的准确性和稳定性,配合设置机械臂可以让焊接头在三维空间内移动,让焊接头可以到达不同的位置和角度,整体焊接角度的可调性得到了更好的保障。
17、在上述实施例中,所述配合承载结构包括:提供钻头工件放置区域的承载板,衔接于所述承载板下端、带动其进行高度调节的抬升承载架,与所述抬升承载架连接、提供抬升承载架调节动力的延伸调节杆架,设置于所述抬升承载架远离承载板的一端、提供组件安装区域的连接件。
18、通过安装有承载板、抬升承载架、延伸调节杆架和连接件,在进行钻头工件装配工作时,根据不同钻头工件的高度和大小来调整操作高度,并提供一个固定的平面用于安装钻头工件,可以在连接件上加装移动轮,从而增加整体的可调节位移性。
19、第三方面,提出一种钻机专用钻头焊接设备的焊接方法,包括以下步骤:
20、s1、准备工作:将要焊接的钻头和设备表面清洗干净,去除油脂和其他杂物,确保表面光洁,确定焊接位置,根据钻头形状和规格,在设备上确定要将钻头焊接的位置,并进行标记或固定;
21、s2、焊接准备:将焊接材料和焊接设备预热至预定的温度,使用夹持结构对钻头工件进行夹持;
22、s3、焊接过程:焊接过程需要控制焊接材料的温度和焊接时间,对于选取的焊接材料进行加热,使其达到熔化状态;在一侧工位上的钻头工件进行焊接工作时,在另一侧工位进行钻头工件的装配,钻头工件首先通过夹持结构夹紧固定在换位承载架的工位之一,然后该工位被旋转到焊接位置,通过焊接机器人进行焊接操作;
23、s4、焊接后处理:在钻头工件移动到另一个工位上后,采用探伤组件可以用于检测钻头焊接的缺陷,探伤组件对钻头焊接部分进行全面的检测,进行探伤检测,发现并记录异常情况,对焊接部位进行检测,如果未发现任何缺陷,钻头工件可以移动回一侧工位进行下一步操作,如果有缺陷,则需要进行修复或重新焊接操作。
24、在上述实施例中,所述探伤检测的过程包括:
25、当前钻头工件完成焊接后,由所述焊接换位结构驱动完成焊接后的所述钻头工件回转180度后停止;
26、所述探伤头运动至第一拍摄位置,由工业相机拍摄当前钻头工件位置的照片作为第一输出图像;由图像识别模块判断当前所述第一输出图像是否存在焊接缺陷,若存在焊接缺陷,则输出当前焊接缺陷的位置及缺陷类型;若不存在焊接缺陷,则跳入下一步;
27、所述探伤头运动至第二拍摄位置,由工业相机拍摄当前工作位置作为第二输出图像;重复图像识别动作,判断是否存在焊接缺陷,若不存在则跳入下一步;
28、所述探伤头运动至第三拍摄位置,由工业相机拍摄当前工作位置作为第三输出图像;重复图像识别动作,判断是否存在焊接缺陷,若不存在则跳入下一步;
29、当钻头工件不存在缺陷时,直接取下钻头工件即可,当钻头工件存在缺陷时,通过所述焊接换位结构驱动钻头工件反向运动至焊接工位上进行二次焊接。
30、在上述实施例中,所述第一拍摄位置的定义如下:所述工业相机的拍摄方向位于三爪卡盘的水平中心线位置,由钻头工件的一端中心向另一端拍摄,为x方向;
31、所述第二拍摄位置的定义如下:由所述钻头工件从上至下拍摄,拍摄方位为所述钻头工件的长轴方向,为z方向;
32、所述第三拍摄位置的定义如下:由所述钻头工件的前端向后端延伸方向拍摄,设置为y方向;
33、所述钻头工件拍摄过程中由所述三抓卡盘驱动其进行一百八十度转动,此时第三拍摄位置进行第二次拍摄动作。
34、与现有技术相比,本发明的有益效果是:
35、通过安装有焊接换位结构、承载位移结构、配合承载结构、焊接机器人和探伤组件,焊接换位结构先将待焊接的钻头工件放置在一个工位上,让焊接机器人对其进行焊接操作,完成后让钻头工件移动到另一个工位上进行检测操作,配合探伤组件进行检测动作,提升整体焊接工作的完善度。
- 还没有人留言评论。精彩留言会获得点赞!