一种基于因果学习的智能焊接方法及机器人系统
本发明属于焊接工艺和设备,尤其涉及一种基于因果学习的智能焊接方法及机器人系统。
背景技术:
1、焊接是在各种行业中普遍存在的工艺。在现有技术中,虽然这样的工艺可以在某些情况下自动化,通常是通过机器人的机械臂带动焊枪,完成焊接任务。但由于制造复杂度不断上升,目前的焊接机器人对焊接任务的适应能力和创造能力不强,无法像人类焊工一样执行复杂焊接任务,手动焊接操作仍继续存在大量的应用,导致焊接效率不高,同时高技能焊工的短缺日益严重,对于一些高精度焊接,人工焊接效果不佳。
2、由此,为了实现应用焊接机器人进行复杂焊接操作,大大提高焊接效率和安全性,有必要结合机器视觉和人工智能对焊接过程进行智能化升级,将复杂焊接任务的人工操作过程升级为机器人自主焊接。
技术实现思路
1、发明目的:本发明的目的是提供一种基于因果学习的智能焊接方法及机器人系统,通过赋予焊接机器人复杂的焊接知识和构建自适应运动规划与控制系统,实现机器人自主完成复杂焊接任务。
2、技术方案:本发明所述智能焊接方法包括以下步骤:
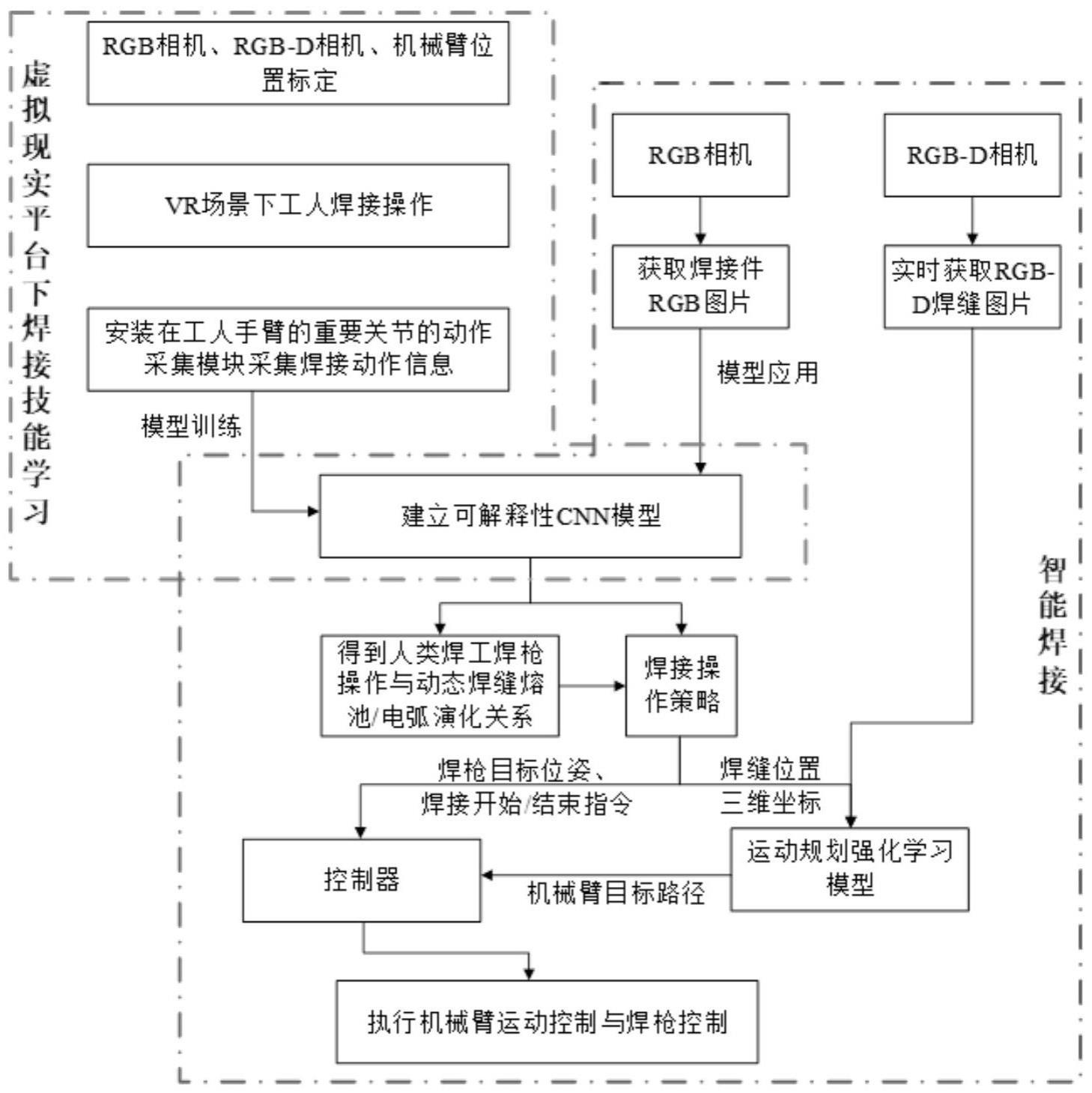
3、s1,采集工人在虚拟现实仿真环境下进行焊接操作的焊接动作信息;
4、s2,根据采集到的焊接动作信息,使用可解释性卷积神经网络cnn模型进行人工焊工焊枪操作的因果分析,建立基于因果分析的cnn模型,得到人工焊工焊枪操作与动态焊缝熔池/电弧演化的关系,以焊缝图像信息为输入,输出相应焊接操作策略;
5、s3,获取焊接件整体图像信息,按焊缝起始点与焊枪初始位置的距离以从近到远的顺序对焊接任务进行排序;
6、s4,基于焊接机器人系统的机械臂运动规划强化学习模型,以实时获取的焊缝图像信息为输入,以机械臂后续动作为输出,实时生成并更新运动规划路径,控制机械臂运动;
7、s5,在焊枪到达焊缝操作区域范围内,根据焊接操作策略,控制焊枪进行焊缝焊接,直至完成所有焊接任务。
8、进一步的,方法还包括以下步骤:建立以焊缝焊接图像信息为输入,焊接是否达标为输出的svm分类模型,焊缝焊接完成后,通过获取的焊缝焊接图像信息,基于svm焊缝质量分类模型判断焊接是否达标,如果达标,则进行下一个焊接任务,否则由工人去除焊缝,控制机械臂进行焊缝重新焊接,并更新基于因果分析的cnn模型,改进焊接操作策略。
9、进一步的,方法还包括以下步骤:完成所有焊缝焊接后,机械臂与焊枪回到初始位置。
10、进一步的,s1中所述采集工人在虚拟现实仿真环境下进行焊接操作的焊接动作信息,具体过程为:工人佩戴vr眼镜,在虚拟现实仿真环境下进行焊接操作,在工人手臂的重要关节上安装包含加速度计、陀螺仪、磁力计传感器的动作采集模块,采集焊接动作信息。
11、一种基于因果学习的智能焊接机器人系统,所述系统包括:焊接模块、图像获取模块、控制模块。
12、所述焊接模块,用于执行焊接,包括机械臂、焊枪,焊枪设置于机械臂的末端。
13、所述图像获取模块,用于获取焊接件整体图像信息和实时焊缝图像信息,包括用于获取实时焊缝图像信息的rgb-d相机、用于获取焊接件整体图像信息的rgb相机。rgb-d相机可随焊接模块移动,rgb相机设置于外部支架上。若一台rgb相机无法获取完整的焊接件图片,可放置多台rgb相机。
14、所述控制模块,为gpu工控机,包括焊接学习子模块、运动规划子模块、焊接控制子模块,分别用于生成基于因果学习的自主焊接vr相机模型、根据传入的焊接件整体图像信息对焊接任务进行规划排序、根据传入的实时焊缝图像信息调用相应焊接操作策略来控制焊接模块完成焊接任务。
15、有益效果:本发明实现应用焊接机器人进行复杂焊接操作,大大提高焊接效率和安全性,结合机器视觉和人工智能对焊接过程进行智能化升级,将复杂焊接任务的人工操作过程升级为机器人自主焊接。
技术特征:
1.一种基于因果学习的智能焊接方法,其特征在于,应用于焊接机器人系统,包括以下步骤:
2.根据权利要求1所述的基于因果学习的智能焊接方法,其特征在于,进一步包括以下步骤:
3.根据权利要求1或2所述的基于因果学习的智能焊接方法,其特征在于,进一步包括以下步骤:
4.根据权利要求1所述的基于因果学习的智能焊接方法,其特征在于,s1中所述采集工人在虚拟现实仿真环境下进行焊接操作的焊接动作信息,具体过程为:工人佩戴vr眼镜,在虚拟现实仿真环境下进行焊接操作,在工人手臂的重要关节上安装包含加速度计、陀螺仪、磁力计传感器的动作采集模块,采集焊接动作信息。
5.基于权利要求1至4任意一项所述方法的基于因果学习的智能焊接机器人系统,其特征在于,所述系统包括:焊接模块、图像获取模块、控制模块,
6.根据权利要求5所述的基于因果学习的智能焊接机器人系统,其特征在于,焊接模块包括机械臂、焊枪,焊枪设置于机械臂的末端。
7.根据权利要求5所述的基于因果学习的智能焊接机器人系统,其特征在于,图像获取模块包括用于获取实时焊缝图像信息的rgb-d相机、用于获取焊接件整体图像信息的rgb相机。
8.根据权利要求7所述的基于因果学习的智能焊接机器人系统,其特征在于,rgb-d相机可随焊接模块移动,rgb相机设置于外部支架上。
9.根据权利要求5所述的基于因果学习的智能焊接机器人系统,其特征在于,控制模块为gpu工控机。
10.根据权利要求7所述的基于因果学习的智能焊接机器人系统,其特征在于,设置多台rgb相机。
技术总结
本发明公开了一种基于因果学习的智能焊接方法及机器人系统,方法包括以下步骤:采集工人在虚拟现实仿真环境下进行焊接操作的焊接动作信息;根据采集到的焊接动作信息,建立基于因果分析的CNN模型,以焊缝图像信息为输入,输出相应焊接操作策略;获取焊接件整体图像信息,对焊接任务进行排序;基于焊接机器人系统的机械臂运动规划强化学习模型,控制机械臂运动;根据焊接操作策略,控制焊枪进行焊缝焊接。本发明利用机器视觉和人工智能技术,通过赋予焊接机器人复杂的焊接知识和构建自适应运动规划与控制系统,可实现机械臂自主完成复杂焊接任务。
技术研发人员:程诚,吴洪状,陈涛
受保护的技术使用者:苏州大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!