一种高精度夹具自动快换零点定位系统的制作方法
本发明涉及机加工领域,特别是一种高精度夹具自动快换零点定位系统。
背景技术:
1、在工业生产过程中,机加自动化生产线有着广泛的应用,在机加自动化生产线中,为实现不同种类、不同工序工件柔性切换生产,自动化生产线须具备自动切换机床夹具的功能且必须满足工件的加工精度,故存在夹具互换性、重复定位精度等技术问题。传统的可实现自动切换的机床夹具,虽然在互换性上有良好的表现,但重复定位精度相对不高,而在高转速的加工条件下,工件受力产生的位移又会放大因定位精度不足而产生的加工误差,在某些高品质、高精度要求的产品加工过程中,传统的机床夹具并不适用,存在较大的局限性。
2、因此现在需要一种能够解决上述问题的方法或装置。
技术实现思路
1、本发明是为了解决上述技术问题,提出一种结构简单,设计巧妙,布局合理,能够在保证夹具快速切换的前提下,实现高精度定位和装夹的自动快换零点定位系统。
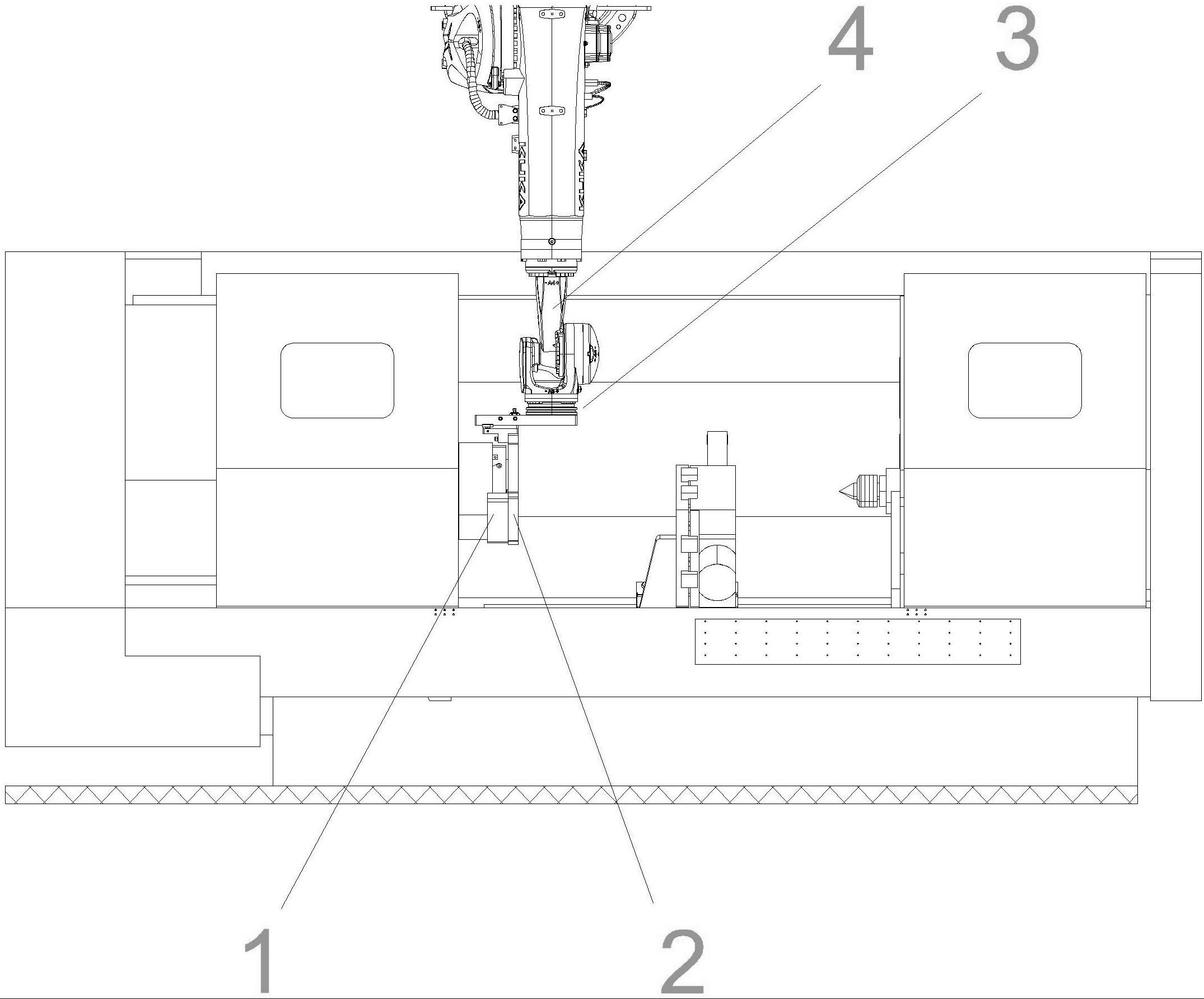
2、本发明的技术解决方案是:一种高精度夹具自动快换零点定位系统,其特征在于:所述的系统包括相互匹配的零点母板1和零点子板2,所述零点子板2的顶端通过连接机构3与六轴机器人抓手4连接,
3、所述的零点母板1上设置有三个在圆周方向上均匀分布的第一零点卡盘5,同时在零点母板1的中心处还设置有定位轴6,所述的定位轴6为锥形轴,
4、所述零点子板2上设置有三个第一定位拉钉7,所述的三个第一定位拉钉7与零点母板1上的三个第一零点卡盘5一一对应,同时在零点子板2的中心处还设置有与所述定位轴6相匹配的定位环8,所述定位环8内为锥形定位孔,
5、所述连接机构3包括与六轴机器人抓手4固定连接的第一连接板9,所述第一连接板9的底端面上设置有第二零点卡盘10,所述连接机构3还包括固定连接在零点子板2顶端的第二连接板11,所述第二连接板11上设置有与所述第二零点卡盘10相配的第二定位拉钉12。
6、所述第一连接板9的底面上设置有菱形销13和圆销14,所述第二连接板11上则设置有分别与菱形销13和圆销14相匹配的销孔。
7、所述定位轴6和定位环8的锥形定位孔的锥度角为10°,所述定位轴6与锥形定位孔之间,贴合面的贴合度>70%。
8、本发明同现有技术相比,具有如下优点:
9、本种结构形式的高精度夹具自动快换零点定位系统,其结构简单,设计巧妙,布局合理,它针对传统的数控加工中心用的自动快换夹具在使用过程中所存在的重复定位精度难以保证的问题,设计出一种特殊的结构;它包括一个与机床侧相连的母板和一个与机械手侧相连的子板,母板与子板之间通过三个在圆周方向上均匀分布的零点卡盘/定位拉钉组件实现快速连接,同时还通过一套相互匹配的定位轴和定位孔来实现二者之间的精准定位,由于定位轴为锥形轴,而定位孔则为与其相配的锥形孔,因此可以实现高精度的定位;上述结构可以保证在实现快换操作的同时,实现高精度的重复定位。并且这种系统还可以通过更换不同的母板/子板以进行组合,从而实现多品类、多型号的产品加工。该自动快换零点定位系统的制作工艺简单,制造成本低廉,因此可以说它具备多种优点,特别适合于在本领域中推广应用,其市场前景十分广阔。
技术特征:
1.一种高精度夹具自动快换零点定位系统,其特征在于:所述的系统包括相互匹配的零点母板(1)和零点子板(2),所述零点子板(2)的顶端通过连接机构(3)与六轴机器人抓手(4)连接,
2.根据权利要求1所述的高精度夹具自动快换零点定位系统,其特征在于:所述第一连接板(9)的底面上设置有菱形销(13)和圆销(14),所述第二连接板(11)上则设置有分别与菱形销(13)和圆销(14)相匹配的销孔。
3.根据权利要求1所述的高精度夹具自动快换零点定位系统,其特征在于:所述定位轴(6)和定位环(8)的锥形定位孔的锥度角为10°,所述定位轴(6)与锥形定位孔之间,贴合面的贴合度>70%。
技术总结
本发明公开一种高精度夹具自动快换零点定位系统,其特征在于:所述的系统包括相互匹配的零点母板(1)和零点子板(2),所述零点子板(2)的顶端通过连接机构(3)与六轴机器人抓手(4)连接,所述的零点母板(1)上设置有三个在圆周方向上均匀分布的第一零点卡盘(5),同时在零点母板(1)的中心处还设置有定位轴(6),所述的定位轴(6)为锥形轴,所述零点子板(2)上设置有三个第一定位拉钉(7),所述的三个第一定位拉钉(7)与零点母板(1)上的三个第一零点卡盘(5)一一对应,同时在零点子板(2)的中心处还设置有与所述定位轴(6)相匹配的定位环(8),所述定位环(8)内为锥形定位孔。
技术研发人员:李兆刚,李迎辉,彭作明,郭翔
受保护的技术使用者:大连奥托自动化设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!