一种球体姿态调整装置及方法
本发明属于智能制造领域,涉及一种球体姿态调整装置及方法。
背景技术:
1、在空心球的加工过程中,通常使用铜合金、不锈钢、铝合金等薄板,通过冲压形成空心半球,然后对空心半球进行割边加工;随后,将两个空心半球扣合后,再进行焊接,最终形成完整的空心球结构;然而,在焊接之前,必须将扣合后的空心球精确调整至正确的焊接位置。目前空心球在焊接前采用人工装卡,但人工调整不仅精度有限,而且费时费力,效率低下;因此,需要一种能够自动调整空心球位置的装置,提高焊接精度以确保焊接质量,且该装置应能够精确捕捉空心球的位置和姿态,并实现自动化调整,从而为后续焊接工作提供更稳定、高效的支持。
技术实现思路
1、本发明的目的是提供一种球体姿态调整装置及方法,其具有结构简单、自动化程度高、精度高、安全可靠的优点,可实现对球体的自动装卡、精确定位和姿态调整。
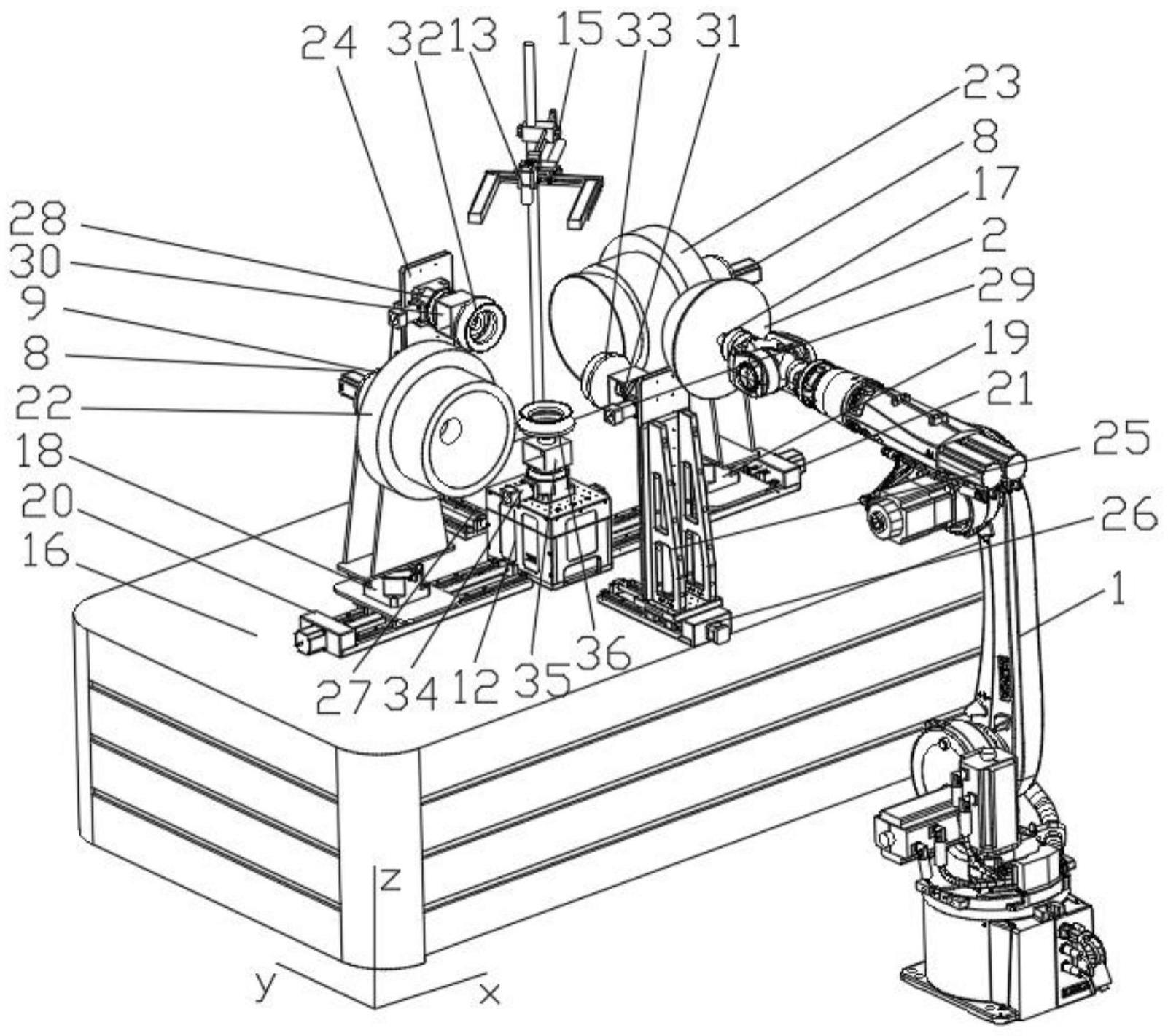
2、为解决现有技术中存在的上述问题,本发明提供一种球体姿态调整装置及方法,调整装置由机械臂、端面定位板、吸盘、空心半球、x轴电动位移台、中空旋转平台、半球体夹具、电机、气缸、z轴电动位移台、定位块、电动升降台、相机、y轴电动位移台、支架和工作台组成。
3、所述吸盘ⅰ固定连接在机械臂末端,端面定位板固定连接在吸盘ⅰ上,所述中空旋转平台ⅰ、中空旋转平台ⅱ分别固定连接在x轴电动位移台ⅰ、x轴电动位移台ⅱ上,所述半球体夹具ⅰ、半球体夹具ⅱ分别固定连接在中空旋转平台ⅰ、中空旋转平台ⅱ上,所述z轴电动位移台ⅰ、z轴电动位移台ⅱ分别固定连接在y轴电动位移台ⅰ、y轴电动位移台ⅱ上,所述中空旋转平台ⅲ、中空旋转平台ⅳ分别固定连接在z轴电动位移台ⅰ、z轴电动位移台ⅱ上,所述定位块ⅰ、定位块ⅱ分别固定在中空旋转平台ⅲ、中空旋转平台ⅳ上,所述吸盘ⅱ、吸盘ⅲ分别固定连接在定位块ⅰ、定位块ⅱ上,所述中空旋转平台ⅴ固定连接在电动升降台上,所述定位块ⅲ固定连接在中空旋转平台ⅴ上,所述吸盘ⅳ固定连接在定位块ⅲ上,所述相机固定连接在支架上。
4、其姿态调整方法包括以下步骤:
5、步骤1:机器臂利用末端的吸盘ⅰ依次将两个空心半球定位到两个半球体夹具中,并利用半球体夹具中气缸抽真空进行吸附;
6、步骤2:通过两个中空旋转平台,分别将两个半球体夹具逆时针旋转90°和顺时针旋转90°;
7、步骤3:两个x轴电动位移台带动两个半球体夹具进行对心运动,直至两个空心半球合拢,并处于预紧状态;
8、步骤4:电机驱动两个半球体夹具旋转,上方的相机对球体拼缝进行检测,得到球体在y轴和z轴圆周方向的偏摆量;
9、步骤5:电动升降台带动吸盘ⅳ向+z方向移动,到达预定位置后,吸盘ⅳ将球体吸附住,同时停止两个半球体夹具中气缸抽真空,然后,两个半球体夹具进行离心运动;
10、步骤6:通过电动升降台上方的中空旋转平台ⅴ旋转,调整球体绕z轴圆周方向偏摆量;
11、步骤7:两侧y轴电动位移台带动两个z轴电动位移台进行对心运动,到达预定位置后,利用z轴电动位移台上的吸盘将球体吸附住;
12、步骤8:利用z轴电动位移台上的中空旋转平台,调整球体绕y轴圆周方向偏摆量;
13、步骤9:两个x轴电动位移台带动两个半球体夹具进行对心运动,到达预定位置后,两个半球体夹具中气缸抽真空将球体吸附。
14、所述x轴电动位移台ⅰ和x轴电动位移台ⅱ位于工作台中轴线的两侧对称分布。
15、所述y轴电动位移台ⅰ和y轴电动位移台ⅱ位于工作台中轴线的两侧对称分布。
16、所述半球体夹具ⅰ和半球体夹具ⅱ回转轴共轴线。
17、所述电动升降台位于工作台中轴线的交点处,带动中空旋转平台ⅴ上下移动。
18、所述机械臂采用多关节结构,具有良好的机械灵活性和精准度。
19、所述端面定位板上有圆形凹槽,其直径与空心半球直径一致。
20、本发明的有益效果在于:
21、本发明装置能够实现对空心半球自动装卡、精确定位和姿态调整,且装卡空心半球不用人工参与,安全可靠,具有省时省力、加工效率高的特点。
技术特征:
1.一种球体姿态调整装置的姿态调整方法,其特征在于:所述调整装置包括机械臂(1)、端面定位板(2)、吸盘(3)、空心半球(4)、x轴电动位移台(5)、中空旋转平台(6)、半球体夹具(7)、电机(8)、气缸(9)、z轴电动位移台(10)、定位块(11)、电动升降台(12)、相机(13)、y轴电动位移台(14)、支架(15)和工作台(16);所述吸盘ⅰ(17)固定连接在机械臂(1)末端,端面定位板(2)固定连接在吸盘ⅰ(17)上,所述中空旋转平台ⅰ(18)、中空旋转平台ⅱ(19)分别固定连接在x轴电动位移台ⅰ(20)、x轴电动位移台ⅱ(21)上,所述半球体夹具ⅰ(22)、半球体夹具ⅱ(23)分别固定连接在中空旋转平台ⅰ(18)、中空旋转平台ⅱ(19)上,所述z轴电动位移台ⅰ(24)、z轴电动位移台ⅱ(25)分别固定连接在y轴电动位移台ⅰ(26)、y轴电动位移台ⅱ(27)上,所述中空旋转平台ⅲ(28)、中空旋转平台ⅳ(29)分别固定连接在z轴电动位移台ⅰ(24)、z轴电动位移台ⅱ(25)上,所述定位块ⅰ(30)、定位块ⅱ(31)分别固定连接在中空旋转平台ⅲ(28)、中空旋转平台ⅳ(29)上,所述吸盘ⅱ(32)、吸盘ⅲ(33)分别固定连接在定位块ⅰ(30)、定位块ⅱ(31)上,所述中空旋转平台ⅴ(34)固定连接在电动升降台(12)上,所述定位块ⅲ(35)固定连接在中空旋转平台ⅴ(34)上,所述吸盘ⅳ(36)固定连接在定位块ⅲ(35)上,所述相机(13)固定连接在支架(15)上;
2.根据权利要求1所述的球体姿态调整平台的姿态调整方法,其特征在于:所述x轴电动位移台ⅰ(20)和x轴电动位移台ⅱ(21)位于工作台(16)中轴线的两侧对称分布。
3.根据权利要求1所述的球体姿态调整平台的姿态调整方法,其特征在于:所述y轴电动位移台ⅰ(26)和y轴电动位移台ⅱ(27)位于工作台(16)中轴线的两侧对称分布。
4.根据权利要求1所述的球体姿态调整平台的姿态调整方法,其特征在于:所述半球体夹具ⅰ(22)和半球体夹具ⅱ(23)回转轴共轴线。
5.根据权利要求1所述的球体姿态调整平台的姿态调整方法,其特征在于:所述电动升降台(12)位于工作台(16)中轴线的交点处,带动中空旋转平台ⅴ(34)上下移动。
6.根照权利要求1所述的球体位姿调整装置,其特征在于:所述机械臂(1)采用多关节结构,具有良好的机械灵活性和精准度。
7.根照权利要求1所述的球体位姿调整装置,其特征在于:所述端面定位板(2)上有圆形凹槽,其直径与空心半球(4)直径一致。
技术总结
本发明涉及一种球体姿态调整装置及方法,包括机械臂、端面定位板、吸盘、空心半球、X轴电动位移台、中空旋转平台、半球体夹具、电机、气缸、Z轴电动位移台、定位块、电动升降台、相机、Y轴电动位移台、支架和工作台。该方法包括将半球体定位到半球体夹具中、旋转半球体夹具、对心运动、检测球体偏摆量、吸附球体、调整球体绕Z轴和Y轴圆周方向的偏摆量等步骤。本发明能实现对空心半球自动装卡、精确定位和姿态调整,且装卡空心半球不用人工参与,安全可靠,具有省时省力、加工效率高的特点。
技术研发人员:李超,潘睿志,向腾,赵远发
受保护的技术使用者:成都理工大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!