一种风电塔筒法兰螺栓的紧固方法与流程
本发明涉及风力发电,尤其涉及一种风电塔筒法兰螺栓的紧固方法。
背景技术:
1、螺栓连接具有工艺要求较低、结构简单和装拆方便特点,且其结构可靠,强度高,是应用极为广泛的一类机械零件。在各种机械、设备、车辆、船舶、铁路、桥梁、建筑、结构、工具、仪器、仪表和用品等上面都可以看到各式各样的螺栓。对于重大工程及重型机械设备而言,螺栓的检测防松问题已经成为全世界范围内的重大科学瓶颈。特别是对于中大型风力发电机组而言,其所使用的螺栓数量十分巨大,且通常在位置狭小且不易检查的位置,抑或在风险较高的危险处;另外,风力发电机组因为长期工作在野外、暴晒和雷雨等恶劣环境中,其损坏率高达40~50%,同时由于风力发电设备的维护技术跟不上风力发电的发展速度,一旦其关键零部件(如齿轮、轴承、叶片等)发生故障,将会使设备损坏、发电机停机,带来严重的经济损失。因此,为保证风力发电系统可靠稳定运行,降低系统的维护成本,保证风电塔筒的每个螺栓都处在标准扭矩范围内是十分必要的。
2、风电塔筒的侧壁底部一般向外倾斜设置,风电塔筒的内侧壁设置有环绕塔筒的紧固平台,而紧固螺栓则间隔均匀地围绕于紧固平台的顶部。以往,国内的风力发电企业通过人工攀爬来逐一检测紧固螺栓,而人员攀爬检测主要采取简单的扳手检测,检测难度大风险高,效率低。此外,由于是人工检测,其效率和精度都难以保障,且受天气的客观因素影响较大,受环境及工程技术人员水平限制,检测及紧固质量难以保证。
3、为了解决人工检测带来的效率和安全问题,一些风力发电企业研制出用于实现风力发电机组塔筒螺栓快速紧固的作业装置,而现有的螺栓紧固装置一般包括行走机构和紧固机构,其中,行走机构用于令紧固机构能够沿风电塔筒的内侧壁移动,紧固机构用于拧紧位于紧固平台的螺栓。
4、现有的螺栓紧固装置一般携带自动扳手,通过自动扳手对螺栓施加扭矩,从而实现螺栓的拧紧。由于现有装置中的自动扳手一般与紧固机构中的其他部件刚性连接,当自动扳手向螺栓施加扭矩时,紧固装置也会受到扭矩施加时的反作用而发生小幅度的结构扭转,而该小幅度的结构扭转可能会导致紧固机构中的其他部件,甚至行走机构的部件损坏,不利于延长螺栓紧固装置的使用寿命。
技术实现思路
1、本发明的目的在于提出一种风电塔筒法兰螺栓的紧固方法,在风电塔筒作业机器人的结构上通过增设柔性链,以缓冲并抵消拧紧螺栓时所带来的作用力,并根据结构的设置对其螺栓紧固方法进行改进,以在确保螺栓紧固方法的作业速度和精度的前提下,对风电塔筒作业机器人起到有效的保护作用,延长风电塔筒作业机器人的使用寿命。
2、为达此目的,本发明采用以下技术方案:
3、一种风电塔筒法兰螺栓的紧固方法,适用于风电塔筒作业机器人,所述风电塔筒作业机器人包括行走机构和紧固机构,所述紧固机构安装于所述行走机构;
4、所述紧固机构包括升降座、柔性链和紧固组件,所述升降座可上下移动地安装于所述行走机构,所述紧固组件设置于所述升降座的下方,且所述升降座和所述紧固组件之间通过所述柔性链相连,所述升降座通过所述柔性链带动所述紧固组件的上下移动;所述紧固组件的底部设置有用于容纳螺母的紧固套筒,且所述紧固套筒可相对于所述紧固组件转动;
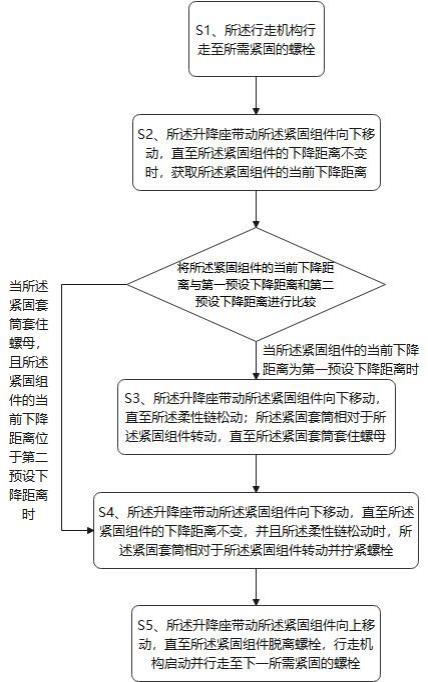
5、s1、所述行走机构行走至所需紧固的螺栓;
6、s2、所述升降座带动所述紧固组件向下移动,直至所述紧固组件的下降距离不变时,获取所述紧固组件的当前下降距离;
7、当所述紧固组件的当前下降距离为第一预设下降距离时,进入步骤s3;
8、当所述紧固套筒套住螺母,且所述紧固组件的当前下降距离位于第二预设下降距离时,进入步骤s4;
9、s3、所述升降座带动所述紧固组件向下移动,直至所述柔性链松动;所述紧固套筒相对于所述紧固组件转动,直至所述紧固套筒套住螺母;
10、s4、所述升降座带动所述紧固组件向下移动,直至所述紧固组件的下降距离不变,并且所述柔性链松动时,所述紧固套筒相对于所述紧固组件转动并拧紧螺栓;
11、s5、所述升降座带动所述紧固组件向上移动,直至所述紧固组件脱离螺栓,行走机构启动并行走至下一所需紧固的螺栓。
12、优选的,步骤s2还包括:
13、当所述紧固套筒没有套住螺母,且所述紧固组件的当前下降距离位于第二预设下降距离时,发出异常状态报警信号;
14、当所述紧固组件的当前下降距离位于第三预设下降距离时,发出异常状态报警信号。
15、优选的,步骤s3中,所述升降座带动所述紧固组件向下移动的下降距离小于所述柔性链的长度的2/3。
16、优选的,所述紧固组件还包括驱动扳手,所述驱动扳手设置于所述柔性链和所述紧固套筒之间;所述驱动扳手包括驱动轴、扳手本体和反作用力臂,所述紧固套筒可转动地安装于所述驱动轴的底部;所述扳手本体可转动地套装于所述驱动轴的外部,所述反作用力臂安装于所述扳手本体的一侧,且所述反作用力臂的外侧设置有与风电塔筒的侧壁相抵的反作用面;
17、步骤s4中,所述紧固套筒相对于所述紧固组件转动并拧紧螺栓包括:
18、所述驱动轴带动反作用力臂转动,直至所述反作用面与风电塔筒的侧壁相抵;
19、所述驱动轴带动所述紧固套筒转动,直至所述紧固套筒拧紧螺栓。
20、优选的,所述紧固机构还包括距离检测器,所述距离检测器安装于所述行走机构,且所述距离检测器的检测端对准所述紧固组件的顶部;
21、步骤s2中,通过所述距离检测器获取所述紧固组件的下降距离。
22、优选的,步骤s5包括:
23、s51、所述升降座带动所述紧固组件向上移动,通过所述距离检测器获取所述距离检测器的检测端与所述紧固组件之间的上升间距;
24、当上升间距小于上升阈值时,进入步骤s52;
25、s52、所述升降座停止带动所述紧固组件向上移动,行走机构启动并行走至下一所需紧固的螺栓。
26、优选的,所述紧固机构还包括升降驱动器,所述升降驱动器安装于所述行走机构,且所述升降驱动器的输出端与所述升降座相连,所述升降驱动器用于驱动所述升降座的上下移动,所述升降驱动器电联接于所述距离检测器;
27、步骤s5包括:
28、s51、所述升降驱动器开启驱动所述紧固组件向上移动,通过所述距离检测器获取所述距离检测器的检测端与所述紧固组件之间的上升间距;
29、当上升间距小于上升阈值时,进入步骤s52;
30、当上升间距大于等于上升阈值时,进入步骤s53;
31、s52、所述升降驱动器关闭,行走机构启动并行走至下一所需紧固的螺栓;
32、s53、获取所述升降驱动器的驱动参数;
33、当所述升降驱动器的驱动参数在标准参数范围内时,进入步骤s51;
34、当所述升降驱动器的驱动参数不在标准参数范围内时,所述升降驱动器关闭,并发出异常状态报警信号。
35、优选的,所述紧固机构还包括激光定位传感器,所述激光定位传感器安装于所述行走机构,且所述激光定位传感器靠近所述紧固套筒设置;所述激光定位传感器电联接于所述行走机构,且所述激光定位传感器的激光发射端朝向风电塔筒的侧壁;
36、步骤s1包括:
37、s11、所述行走机构按照预设速度沿紧固平台匀速行走,并获取所述激光定位传感器所发出的激光光束的实时长度;
38、当激光光束的实时长度小于第一预设长度时,进入步骤s12;
39、s12、获取激光光束的实时长度与第二预设长度之间的差值e(t);
40、基于pid算法,计算运行速度v(t);
41、;
42、其中,kp、ki、kd均为常数;
43、所述行走机构按照运行速度沿紧固平台行走;
44、s13、比较运行速度和运行阈值;
45、当运行速度大于等于运行阈值时,进入步骤s12并更新运行速度;
46、当运行速度小于运行阈值时,进入步骤s14;
47、s14、所述行走机构停止行走。
48、优选的,所述第一预设长度为,当所述激光定位传感器所发出的激光光束末端落在风电塔筒的侧壁时,所述激光定位传感器所发出的激光光束的长度;
49、所述第二预设长度为,当所述紧固套筒和螺母同轴时,所述激光定位传感器所发出的激光光束的长度。
50、优选的,所述激光光束的发射方向与所述行走机构的行走方向的切线相互垂直;
51、所述第二预设长度为,当所述激光定位传感器所发出的激光光束末端落在螺栓的侧壁时,所述激光定位传感器所发出的激光光束的最短长度。
52、本发明实施例提供的技术方案可以包括以下有益效果:
53、将紧固机构进行了分体设计,将用于实现升降功能的升降座和用于拧紧螺栓的紧固组件设计为独立的结构,并将上述两个独立的结构利用柔性链(包括但不限于铁链、安全绳等)进行连接。在对紧固组件进行升降时,升降座通过柔性链带动紧固组件进行上升和下降,柔性链的设置不会影响紧固组件升降动作的正常实现;而当紧固组件需要施加扭矩拧紧螺栓时,其反作用力会被柔性链缓冲并抵消,从而避免升降组件甚至作业机器人的其他结构受到上述反作用力而发生损坏,从而能有效延长作业机器人的使用寿命。
54、根据结构改进后的紧固机构,对作业机器人的螺栓紧固方法进行改进,以在确保螺栓紧固方法的作业速度和精度的前提下,对风电塔筒作业机器人起到有效的保护作用,从而更有利于延长风电塔筒作业机器人的使用寿命。
- 还没有人留言评论。精彩留言会获得点赞!