点焊装置及点焊方法与流程
本公开涉及进行点焊的点焊装置及点焊方法。
背景技术:
1、已知一种点焊装置,在分别设置于一对焊枪臂的前端的相对的一对电极头间夹持被焊接物的同时进行通电来对被焊接物进行点焊(例如,参照日本特开2006-341266)。在一方的焊枪臂上设置有朝向不同方向的另外的电极头。
技术实现思路
1、关于设置有上述不同方向的电极头的焊枪臂,需要进行示教以免不使用的电极头干扰到被焊接物。因而,示教工时有可能增加。
2、本公开是为了解决这样的问题点而完成的,主要目的在于,提供能够减少示教工时的点焊装置及点焊方法。
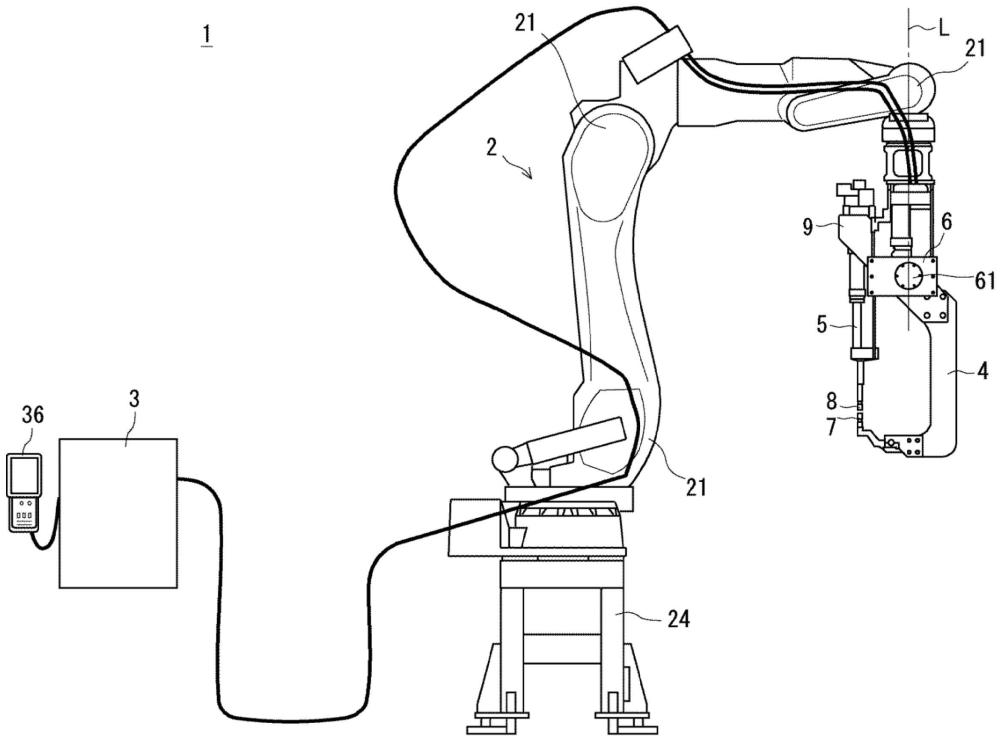
3、用于达成上述目的的本公开的一方式是一种点焊装置,该点焊装置具备:
4、机械臂;
5、一对焊枪臂,其设置于所述机械臂的前端;以及
6、一对电极头,其分别设置于所述一对焊枪臂的前端且相对,
7、该点焊装置在所述一对电极头间夹持被焊接物的同时进行通电来对被焊接物进行点焊,其中,
8、该点焊装置具备旋转机构,该旋转机构设置于所述机械臂的前端,使所述一对焊枪臂以相对于所述机械臂的前端侧部分的长度方向的中心轴垂直的轴为中心而旋转。
9、在该一方式中,也可以是,
10、所述一对焊枪臂为固定焊枪臂及可动焊枪臂,
11、该固定焊枪臂形成为侧视l字状,一端侧可旋转地安装于所述旋转机构且在另一端侧的前端部安装有所述电极头,该可动焊枪臂的一端经由滑动机构而安装于所述固定焊枪臂的一端且在另一端安装有所述电极头的可动焊枪臂,
12、所述滑动机构构成为,使所述可动焊枪臂的电极头朝向所述固定焊枪臂的电极头滑动。
13、在该一方式中,也可以是,
14、该点焊装置还具备控制所述旋转机构的致动器的控制装置,
15、所述控制装置控制所述旋转机构的致动器,使作为所述垂直的轴的运动轴旋转,来调整固定焊枪臂及可动焊枪臂的角度。
16、用于达成上述目的的本公开的一方式是一种点焊方法,该点焊方法是如下点焊装置的点焊方法,该点焊装置具备:
17、机械臂;
18、一对焊枪臂,其设置于所述机械臂的前端;以及
19、一对电极头,其分别设置于所述一对焊枪臂的前端且相对,
20、该点焊装置在所述一对电极头间夹持被焊接物的同时进行通电来对被焊接物进行点焊,其中,
21、在该点焊方法中,通过设置于所述机械臂的前端的旋转机构,使所述一对焊枪臂以相对于所述机械臂的前端侧部分的长度方向的中心轴垂直的轴为中心而旋转。
22、根据本公开,能够提供一种能够减少示教工时的点焊装置及点焊方法。
技术特征:
1.一种点焊装置,具备:
2.根据权利要求1所述的点焊装置,其中,
3.根据权利要求2所述的点焊装置,其中,
4.一种点焊方法,是如下点焊装置的点焊方法,该点焊装置具备:
技术总结
点焊装置具备:机械臂;一对焊枪臂,其设置于机械臂的前端;以及一对电极头,其分别设置于一对焊枪臂的前端且相对,该点焊装置在一对电极头间夹持被焊接物的同时进行通电来对被焊接物进行点焊。点焊装置具备旋转机构,该旋转机构设置于机械臂的前端,使一对焊枪臂以相对于机械臂的前端侧部分的长手方向的中心轴垂直的轴为中心而旋转。
技术研发人员:平井祐辉,田所裕贵,林哲史,田中慎一,熊野正幸
受保护的技术使用者:丰田自动车株式会社
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!