一种一体化焊接机器人的制作方法
本申请涉及到机器人,尤其涉及到一种一体化焊接机器人。
背景技术:
1、目前在焊接机器人领域,送丝管路作为构成焊接系统的重要组成部分,绝大多数位于机器人手臂的外部,即送丝管路从机器人手臂的外部设置并进行支撑安装。上述方案存在送丝管路干涉、悬挂外部工件和设备的风险,降低在狭小、幽深空间的可达性,甚至造成在上述位置无法进行焊接作业。
技术实现思路
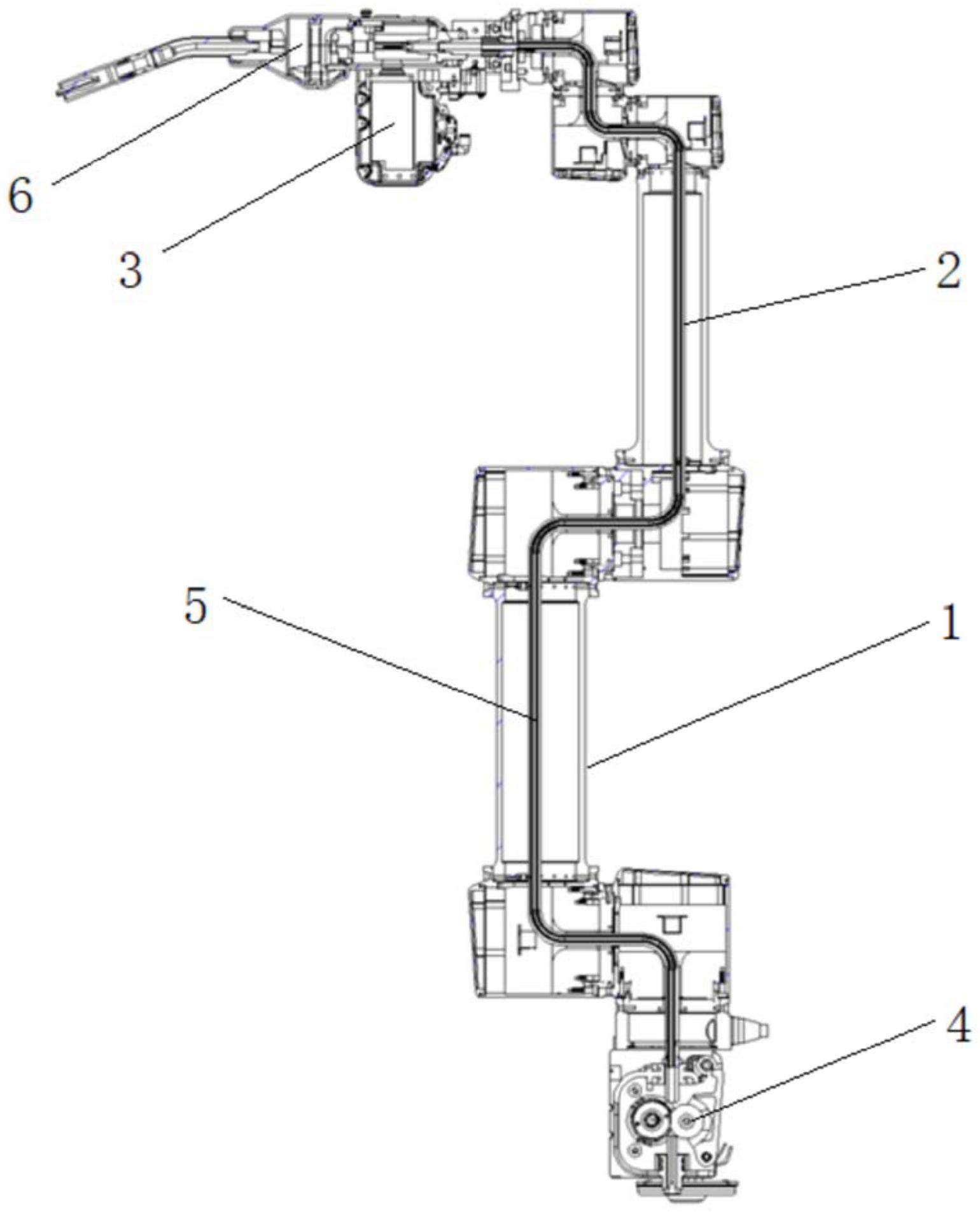
1、本申请提供了一种一体化焊接机器人,用以实现送丝管路完全内置于机器人手臂,且送丝装置直接集成至机器人首末两端的焊接机器人,避免了送丝管路带来的干涉、悬挂外部工件设备的风险。
2、本申请提供了一种一体化焊接机器人,包括:机器人本体和送丝管路,其中,
3、所述送丝管路完全设置于所述机器人本体内部;
4、所述送丝管路用于输送焊丝。
5、在上述技术方案中,通过在所述机器人本体的内部设置有送丝管路,送丝管路完全内置于机器人手臂内部,整个送丝管路外部无任何悬挂、干涉的风险,同时显著降低了机器人手臂的最小动作范围,适用于在狭窄、幽深的空间进行焊接作业。
6、在一个具体的可实施方案中,所述机器人本体包括机器人关节末端轴,其中,
7、所述机器人关节末端轴上设置有主送丝装置,
8、所述机器人关节末端轴与所述主送丝装置连接;
9、所述焊丝依次从所述送丝管路和所述主送丝装置中穿过。
10、在一个具体的可实施方案中,所述机器人本体包括用于固定的机器人关节基座轴,其中,
11、所述机器人关节基座轴上设置有辅助送丝装置,
12、所述焊丝穿过所述辅助送丝装置后进入到所述机器人本体内部的所述送丝管路中。
13、在一个具体的可实施方案中,所述送丝管路包括第一管路,其中,
14、所述第一管路设置在所述机器人关节基座轴内,
15、所述焊丝经过所述辅助送丝装置后穿入所述第一管路。
16、在一个具体的可实施方案中,所述机器人本体还包括机器人关节二轴,所述送丝管路包括第二管路,其中,
17、所述第二管路设置在所述机器人关节二轴内,
18、所述焊丝依次穿装设置于所述第一管路和所述第二管路。
19、在一个具体的可实施方案中,所述机器人本体还包括机器人关节三轴,所述送丝管路还包括第三管路,其中,
20、所述第三管路设置在所述机器人关节三轴内,
21、所述焊丝依次穿装设置于所述第一管路,所述第二管路和所述第三管路。
22、在一个具体的可实施方案中,所述机器人本体还包括机器人关节四轴,所述送丝管路还包括第四管路,其中,
23、所述第四管路设置在所述机器人关节四轴内,
24、所述焊丝依次穿装设置于所述第一管路,所述第二管路,所述第三管路和所述第四管路。
25、在一个具体的可实施方案中,所述机器人本体还包括机器人关节五轴,所述送丝管路还包括第五管路,其中,
26、所述第五管路设置在所述机器人关节五轴内,
27、所述焊丝依次穿装设置于所述第一管路,所述第二管路,所述第三管路,所述第四管路和所述第五管路。
28、在一个具体的可实施方案中,所述送丝管路还包括第六管路,其中,
29、所述第六管路设置在所述机器人关节末端轴内,
30、所述焊丝依次穿装设置于所述第一管路,所述第二管路,所述第三管路,所述第四管路,所述第五管路和所述第六管路。
31、在一个具体的可实施方案中,还包括焊枪,所述焊枪设置在所述机器人关节末端轴上,其中,
32、所述焊丝经过所述主送丝装置进入所述焊枪。
技术特征:
1.一种一体化焊接机器人,其特征在于,包括:机器人本体和送丝管路,其中,
2.根据权利要求1所述的一体化焊接机器人,其特征在于,所述机器人本体包括机器人关节末端轴,其中,
3.根据权利要求2所述的一体化焊接机器人,其特征在于,所述机器人本体包括用于固定的机器人关节基座轴,其中,
4.根据权利要求3所述的一体化焊接机器人,其特征在于,所述送丝管路包括第一管路,其中,
5.根据权利要求4所述的一体化焊接机器人,其特征在于,所述机器人本体还包括机器人关节二轴,所述送丝管路包括第二管路,其中,
6.根据权利要求5所述的一体化焊接机器人,其特征在于,所述机器人本体还包括机器人关节三轴,所述送丝管路还包括第三管路,其中,
7.根据权利要求6所述的一体化焊接机器人,其特征在于,所述机器人本体还包括机器人关节四轴,所述送丝管路还包括第四管路,其中,
8.根据权利要求7所述的一体化焊接机器人,其特征在于,所述机器人本体还包括机器人关节五轴,所述送丝管路还包括第五管路,其中,
9.根据权利要求8所述的一体化焊接机器人,其特征在于,所述送丝管路还包括第六管路,其中,
10.根据权利要求2-9任一项所述的一体化焊接机器人,其特征在于,还包括焊枪,所述焊枪设置在所述机器人关节末端轴上,其中,
技术总结
本申请提供了一种一体化焊接机器人,该一体化焊接机器人包括:机器人本体和送丝管路,其中,所述送丝管路完全设置于所述机器人本体内部;所述送丝管路用于输送焊丝。在上述技术方案中,通过在所述机器人本体的内部设置有送丝管路,送丝管路完全内置于机器人手臂内部,整个送丝管路外部无任何悬挂、干涉的风险,同时显著降低了机器人手臂的最小动作范围,适用于在狭窄、幽深的空间进行焊接作业。
技术研发人员:才磊,王景磊
受保护的技术使用者:唐山松下产业机器有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!