一种基于3D视觉优化加工路径的铸件去毛刺加工方法与流程
本发明属于去毛刺加工,具体涉及一种基于3d视觉优化加工路径的铸件去毛刺加工方法。
背景技术:
1、在压铸等铸造行业,打磨去毛刺是必备的一道加工工序。由于铸造工艺等原因,同一批次的产品其局部形状可能会有形变。现有的去毛刺加工中心运行时都是根据预先编制好的加工程序,采用固定路径进行去毛刺打磨。对于有形变的产品,现有设备可能会出现去毛刺不干净或损坏产品等问题。
2、如公开(公布)号为cn218284969u的中国专利公开了一种压铸件去毛刺装置,包括夹持部和打磨部;两个耳板之间转动安装有托辊,两个托辊之间安装有用于打磨压铸件毛刺的磨砂带;挡板上的风孔处安装有用于过滤粉尘的滤尘网,挡板的风孔处均安装有风机;当磨砂带打磨毛刺产生粉尘时,粉尘会随着气流和吸尘管进入至壳体内,在滤尘网的过滤作用下,即可对粉尘进行过滤,避免了粉尘弥漫至空气中对工作人员的健康造成危害;通过托辊带动磨砂带运动,即可去除压铸件上的毛刺;通过夹块对压铸件进行夹持固定,方便对压铸件毛刺进行打磨,通过夹块的转动带动压铸件旋转,方便调节压铸件的工位,以对不同位置的毛刺进行打磨处理。该装置可通过旋转压铸件对其不同位置的毛刺进行打磨,但是当压铸件出现形变的时候,其打磨路径也需要随之改变,该装置明显不适用于形变后压铸件的毛刺去除需求。
3、公开(公布)号为cn210997896u的中国专利公开了一种压铸件去毛刺机,其包括机体,机体正上方设有立柱,立柱顶部设有安装盒,安装盒下方设有多个伸缩杆,所述多个伸缩杆下方均连接在一用于固定压铸件的夹具上;安装盒底面的中央设有喷水管;立柱的左右侧均设有可左右移动的移动台,移动台内侧设有可转动的用于去毛刺的钢丝轮。该设备能自动对压铸件去毛刺,省时省力,效果高,也能清洁压铸件。该压铸件去毛刺机同样也不适用于形变后压铸件的毛刺去除需求。
4、为此,我们提出一种基于3d视觉优化加工路径的铸件去毛刺加工方法来解决现有技术中存在的问题,使其能够适用于形变后铸件的毛刺去除需求。
技术实现思路
1、本发明的目的在于提供一种基于3d视觉优化加工路径的铸件去毛刺加工方法,以解决上述背景技术中提出现有技术中由于铸造工艺等原因,同一批次的产品其局部形状可能会有形变,现有的去毛刺加工中心运行时都是根据预先编制好的加工程序,采用固定路径进行去毛刺打磨,对于有形变的产品,现有设备可能会出现去毛刺不干净或损坏产品的问题。
2、为实现上述目的,本发明采用了如下技术方案:
3、一种基于3d视觉优化优化加工路径的铸件去毛刺加工方法,包括以下步骤:
4、读取加工中心的加工程序,提取去毛刺加工路径;
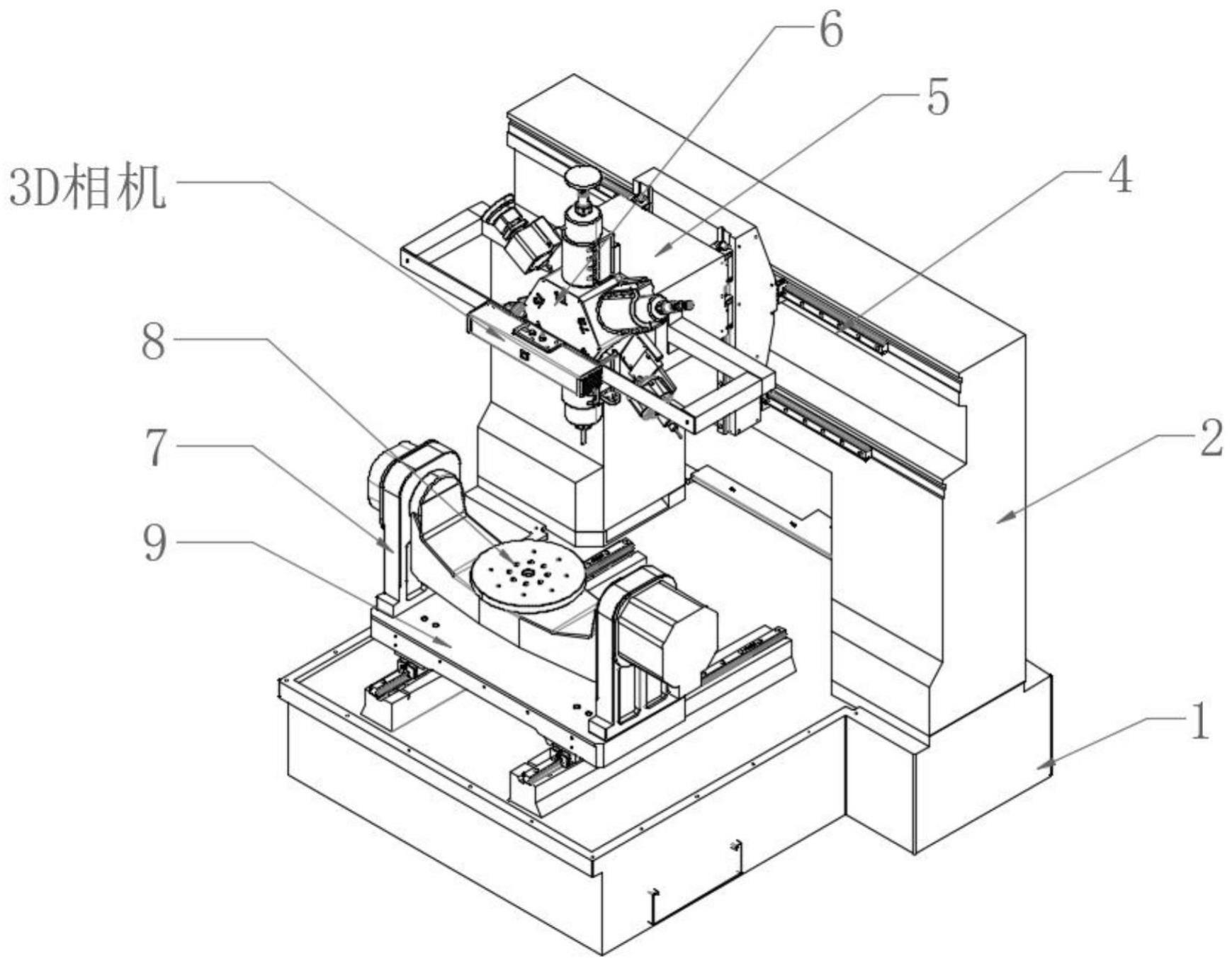
5、利用3d相机扫描待加工产品的3d图像;
6、利用视觉算法将3d图像与标准产品的3d模型进行形变匹配,根据匹配结果提取待加工产品的形变模型,进而计算新的加工路径;
7、根据新的加工路径生成新的加工程序,并发送给加工中心控制系统;
8、加工中心根据新的程序执行去毛刺加工。
9、优选的,所述读取加工中心的加工程序,提取去毛刺加工路径中,所述加工程序根据无形变的标准产品示教等得到,为g代码。
10、优选的,所述读取加工中心的加工程序,提取去毛刺加工路径中,加工路径是由一系列的关键点和路径类别组成,其中路径类别分为圆、圆弧和直线等,加工路径由圆、圆弧和直线其中一种或者多种组合而成。
11、优选的,所述加工路径类别具体如下:
12、若加工路径类别为圆,则该段的加工路径由3个参数组成,分别为:路径类别、圆的起点以及路径上的任一点;
13、若加工路径类别为圆弧,则该段的加工路径由4个参数组成,分别为:路径类别、圆弧的起点、圆弧的终点以及路径上的任一点;
14、若加工路径类别为直线,则该段的加工路径由3个参数组成,分别为:路径类别、直线起点、直线终点。
15、优选的,所述利用视觉算法将3d图像与标准产品的3d模型进行形变匹配,根据匹配结果提取待加工产品的形变模型,进而计算新的加工路径,包括以下步骤:
16、离线获取标准产品3d模型及加工路径,以提取模型特征;
17、在线扫描待加工产品3d图像,以提取点云图像特征;
18、基于模型特征和点云图像特征,利用视觉算法进行形变配准,并获取形变配准结果;
19、基于形变配准结果,利用视觉算法计算待加工产品的形变场,并生成新的加工路径。
20、优选的,所述利用视觉算法将3d图像与标准产品的3d模型进行形变匹配,根据匹配结果提取待加工产品的形变模型,进而计算新的加工路径,其中算法的输入包括:
21、标准产品的3d模型及加工路径的关键点,设点的个数为m;
22、待加工产品的3d图像;具体实现过程如下:
23、预处理,去除待加工产品3d图像上的无效点;
24、特征提取,提取源点云和目标点云的法向量等特征参数;
25、形变匹配,利用非刚性配准等匹配算法将源点云匹配到目标点云;
26、路径优化,获取新的加工路径,进而生成新的加工程序。
27、优选的,所述预处理包括以下步骤:
28、通过采样将3d模型转换为离散的三维空间点,设点的个数为n,得到源点云数据;
29、通过z方向阈值等处理去除待加工产品3d图像上的无效点,得到目标点云数据。
30、优选的,所述形变匹配包括以下步骤:
31、利用非刚性配准等匹配算法将源点云匹配到目标点云;
32、匹配算法的输入为源点云与目标点云的空间点三维坐标、法向量等特征参数;目标函数为匹配后源点云中的点到目标点云中的最近点的平均距离;目标优化参数为源点云每个点的变换矩阵集合t;
33、其中t={t i}(i=1,2,…,n),t i=[x i,y i,z i,a i,b i,c i],x i、y i、z i表示源点云中第i个点的平移量;
34、a i,b i,c i表示源点云中第i个点的法向量变换参数。
35、优选的,所述路径优化包括以下步骤:
36、设原加工路径的关键点坐标集合为p={pi}(i=1,2,…,m),从形变匹配结果中提取各关键点i的变换矩阵t i;
37、利用t i对关键点坐标p i进行位移变换得到新的关键点坐标集合q={q i}(i=1,2,…,m);
38、q即为新的加工路径关键点,结合关键点的路径类别可以得到新的加工路径,进而生成新的加工程序。
39、优选的,所述在线扫描待加工产品3d图像,以提取点云图像特征,其通过3d相机对待加工产品进行扫描,所述3d相机具体为线激光3d相机或结构光等面阵立体相机其中一种。
40、本发明的技术效果和优点:本发明提出的一种基于3d视觉优化加工路径的铸件去毛刺加工方法,与现有技术相比,具有以下优点:
41、本发明在执行去毛刺加工前,对待加工的产品进行3d图像扫描,将扫描的图像与标准产品的3d模型进行形变匹配得到待加工产品的形变模型,再基于形变模型自动调整和优化去毛刺加工路径,从而解决有形变产品的去毛刺加工问题。
- 还没有人留言评论。精彩留言会获得点赞!