钙钛矿电池层跟随除尘控制装置及方法与流程
本发明涉及钙钛矿电池领域,具体而言,涉及钙钛矿电池层跟随除尘控制装置及方法。
背景技术:
1、钙钛矿电池由于其优异的光电转换效率以及可大规模生产的特性,已经引起了广泛的关注。然而,在生产过程中,钙钛矿电池层的清洁度对电池性能有着重要影响。然而,其生产过程中的一项关键环节,激光切割钙钛矿电池层,却产生大量粉尘。这些粉尘不仅会污染钙钛矿电池层,影响电池性能,还可能对生产环境造成污染。
2、在钙钛矿电池层的制造过程中,有效的除尘操作是必不可少的,因为粉尘会影响到电池性能和可靠性。传统的固定程序或人工操作的除尘方法,难以实现对激光切割过程中动态产生粉尘的高效去除,传统的除尘方法除尘效率低,并限制了钙钛矿电池层的生产质量。此外,传统的方法没有充分利用包括激光模块与除尘模块参数数据、钙钛矿电池层参数数据和环境参数数据等多源数据的综合影响,无效进行精准的自动跟随除尘。而且,传统的除尘方法通常采用简单的一个大型除尘设备对激光切割过程中的产生的粉尘进行清除,除尘效率和除尘精度都无法满足制造所需,如何提高钙钛矿电池层在激光切割钙钛矿电池层过程中的除尘效率和精度,是一个亟待解决的问题。
技术实现思路
1、本发明实施例提供了一种钙钛矿电池层跟随除尘控制装置及方法,解决了现有技术中激光切割钙钛矿电池层后除尘方法或装置的除尘效率和精度都无法满足制造所需的技术问题,实现了在激光切割钙钛矿电池层过程中通过自动跟随激光模块的切割路径进行实时除尘,从而提高除尘效率和精度,保证钙钛矿电池层的清洁度和整体生产质量。
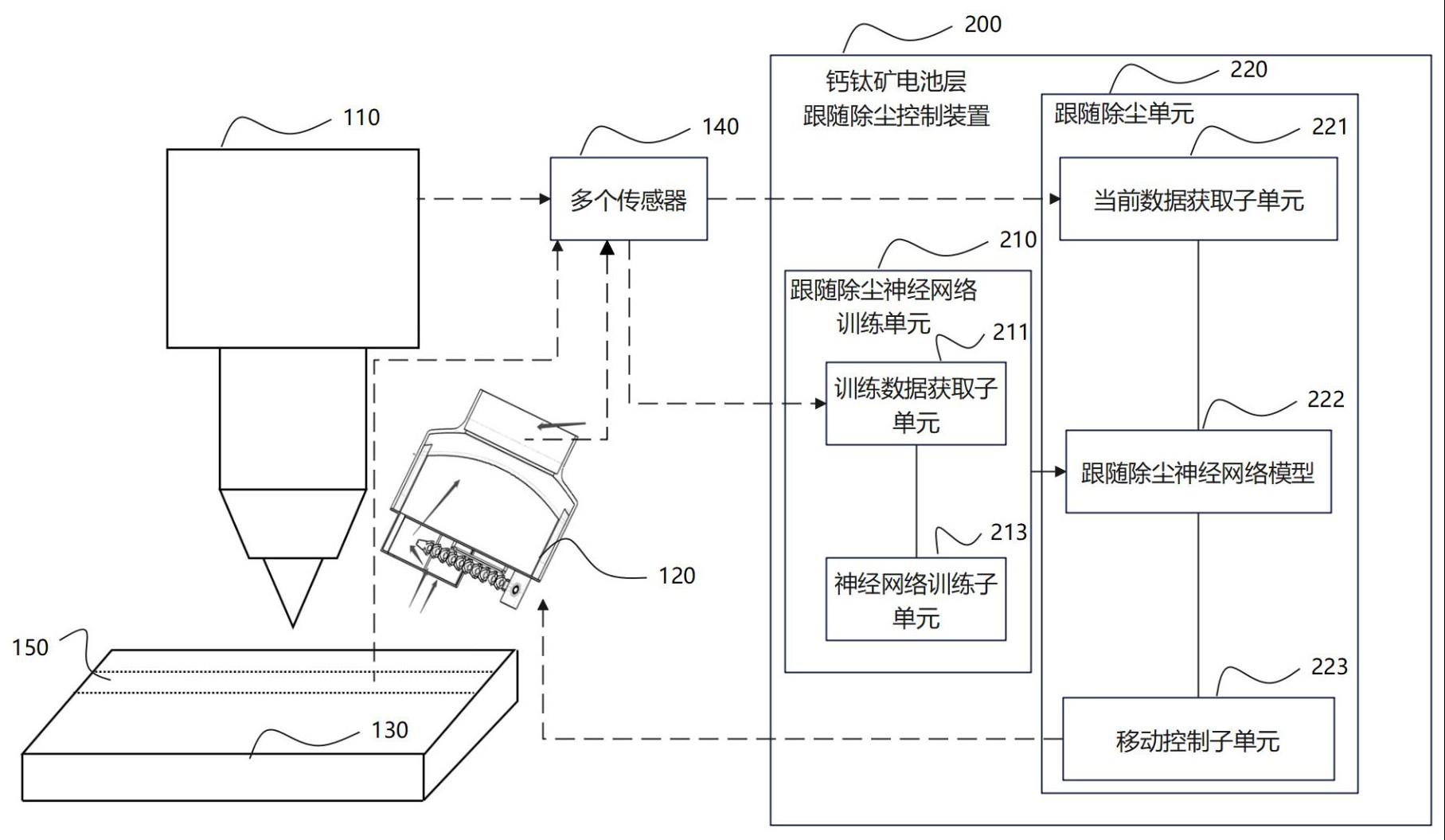
2、根据本发明实施例的一个方面,提供了一种钙钛矿电池层跟随除尘控制装置,包括跟随除尘神经网络训练单元以及跟随除尘单元;该跟随除尘神经网络训练单元包括:训练数据获取子单元,用于获取来自多个传感器的训练跟随除尘参数数据,该训练跟随除尘参数数据包括训练时刻激光模块与除尘模块参数数据、训练时刻钙钛矿电池层参数数据和训练时刻环境参数数据;该神经网络训练子单元,用于获取该训练跟随除尘参数数据,并将该训练跟随除尘参数数据作为输入层数据,对该输入层数据进行训练,得到跟随除尘神经网络模型;该跟随除尘单元包括:当前数据获取子单元,用于获取来自多个传感器的当前跟随除尘参数数据,并输入至跟随该除尘神经网络模型;该除尘神经网络模型,用于根据获取到的当前跟随除尘参数数据,生成当前除尘模块预测位置,该当前除尘模块预测位置预测当前除尘模块与激光模块之间的相对位置;移动控制子单元,用于根据该当前除尘模块预测位置生成第一移动控制指令,以驱动该除尘模块到达当前除尘模块预测位置。
3、根据本发明实施例的一个方面,提供了一种钙钛矿电池层跟随除尘控制方法,包括跟随除尘神经网络训练方法以及跟随除尘方法;该跟随除尘神经网络训练方法包括:获取来自多个传感器的训练跟随除尘参数数据,该训练跟随除尘参数数据包括训练时刻激光模块与除尘模块参数数据、训练时刻钙钛矿电池层参数数据和训练时刻环境参数数据;获取该训练跟随除尘参数数据,并将该训练跟随除尘参数数据作为输入层数据,对该输入层数据进行训练,得到跟随除尘神经网络模型;该跟随除尘方法包括:获取来自多个传感器的当前跟随除尘参数数据,并输入至跟随该除尘神经网络模型;根据获取到的该当前跟随除尘参数数据,生成当前除尘模块预测位置,该当前除尘模块预测位置预测当前除尘模块与激光模块之间的相对位置;根据该当前除尘模块预测位置生成第一移动控制指令,以驱动该除尘模块到达当前除尘模块预测位置。
4、本发明实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:由于提出了一种钙钛矿电池层跟随除尘控制装置及方法,通过设置跟随除尘神经网络训练单元以及跟随除尘单元确保除尘模块可以紧随激光模块的路径,并对产生的粉尘进行实时清除,具体而言,跟随除尘神经网络训练单元具有:训练数据获取子单元,配置为从多个传感器中收集数据,其中数据涉及激光模块、除尘模块、钙钛矿电池层及环境的各种参数,还包括神经网络训练子单元,配置为将上述收集的参数数据作为输入,通过训练算法生成一个专门的神经网络模型。跟随除尘单元具有:当前数据获取子单元,配置为实时地收集当前操作中的参数数据。除尘位置预测模型,基于先前训练的神经网络模型,预测除尘模块的最佳工作位置。移动控制子单元,配置为接收上述预测位置,并生成相应的控制指令,指导除尘模块紧随激光模块进行除尘操作。在钙钛矿电池层的激光切割操作开始时,跟随除尘单元启动。当前数据获取子单元持续收集参数数据,并将这些数据提供给除尘位置预测模型。通过神经网络的推断,预测模型给出除尘模块的最佳工作位置。移动控制子单元接收这个位置,并驱动除尘模块进行相应的移动操作,确保除尘模块可以紧随激光模块的路径,并对产生的粉尘进行实时清除。通过结合神经网络技术,该装置实现了对激光切割过程中粉尘分布的精准预测,确保除尘模块能够实时且准确地紧随激光模块移动,大大增强了除尘的效率和精度。这不仅解决了传统除尘方式中的低效和不精准问题,还大大减少了粉尘对钙钛矿电池层的污染,从而提高了电池的整体性能和可靠性。该装置还通过融合激光模块与除尘模块参数数据、钙钛矿电池层参数数据及环境参数数据这些多源数据,神经网络模型能够更准确地预测除尘模块的最佳工作位置,从而确保更高效、更精确的除尘,提升了预测准确性,并且除尘过程中的多源数据的综合使用使得该装置对单一数据源的异常或缺失具有较强的容错性。即使某一数据源出现问题,其他数据源的信息仍能确保系统正常运行并维持高效的除尘效果。
技术特征:
1.一种钙钛矿电池层跟随除尘控制装置,其特征在于,包括跟随除尘神经网络训练单元以及跟随除尘单元;
2.根据权利要求1所述的装置,其特征在于,所述移动控制单元进一步用于生成第一移动方向控制指令以及第一移动距离控制指令,根据所述第一移动方向控制指令以及所述第一移动距离控制指令,驱动所述除尘模块到达当前除尘模块预测位置。
3.根据权利要求1所述的装置,其特征在于,还包括:
4.根据权利要求3所述的装置,其特征在于,所述特征运算子单元还用于根据所述训练时刻激光与除尘模块参数数据、所述训练时刻钙钛矿电池层参数数据和所述训练时刻环境参数数据,生成环境设备特征值和材料参数特征值,其中,所述环境设备特征值包括特性度量参数特征值以及环境及操作参数特征值。
5.根据权利要求4所述的装置,其特征在于,所述特征运算子单元还用于根据环境及操作参数特征值以及所述材料参数特征值进行组合运算,得到组合特征值;
6.一种钙钛矿电池层跟随除尘控制方法,其特征在于,包括跟随除尘神经网络训练方法以及跟随除尘方法;
7.根据权利要求6所述的方法,其特征在于,根据所述当前除尘模块预测位置生成第一移动控制指令,以驱动所述除尘模块到达当前除尘模块预测位置还包括:
8.根据权利要求6所述的方法,其特征在于,将所述训练跟随除尘参数数据作为输入层数据,对所述输入层数据进行训练的方法包括:
9.根据权利要求8所述的方法,其特征在于,对所述训练跟随除尘参数数据进行特征运算,得到特征运算数据的方法包括:
10.根据权利要求9所述的方法,其特征在于,对所述训练跟随除尘参数数据进行特征运算,得到特征运算数据的方法包括:
11.一种计算机可读的存储介质,其特征在于,
12.一种电子设备,包括存储器和处理器,其特征在于,
技术总结
本发明实施例提供了一种钙钛矿电池层跟随除尘控制装置和方法,该装置包括跟随除尘神经网络训练单元与跟随除尘单元。其中,训练单元通过多个传感器采集激光模块、除尘模块、钙钛矿电池层及环境的参数数据,经训练形成神经网络模型。跟随除尘单元依赖此模型,实时预测除尘模块的最佳工作位置,并驱动其紧随激光模块路径进行除尘,解决了现有技术中激光切割钙钛矿电池层后除尘装置或方法的除尘效率和精度都无法满足制造所需的技术问题,实现了在激光切割钙钛矿电池层过程中通过自动跟随激光模块的切割路径进行实时除尘,从而提高除尘效率和精度,保证钙钛矿电池层的清洁度和整体生产质量。
技术研发人员:马显,付超,石磊
受保护的技术使用者:杭州众能光电科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!