一种用于模具清洗的智能控制方法及系统与流程
本发明属于电子,涉及一种用于模具清洗的智能控制方法及系统。
背景技术:
1、模具部件在机床上加工过程中需要用切削液冷却,并且铣削过程中会有几厘米到几毫米铁屑出现。这些鉄屑会粘附在工件表面或者遗留在模具缝隙或者孔、槽内,对其他工序的正常工作造成影响。因此,在转移到其他工序前需要将这些铁屑等脏污清洗干净。目前模具清理工艺上仍主要采用人工清理,需要花费的时间从30-60分钟不等。这样即占用了机床的利用率,影响生产效率,并且人工清理极耗费人力物力,又会使工人在清洗过程中弄的满身脏污,而且人工清洗存在遗落脏污区域未清洗的情况,清洗效果不理想。
技术实现思路
1、本发明的目的是针对现有技术存在的上述问题,提出了一种用于模具清洗的智能控制方法及系统,其所要解决的技术问题:如何提高模具清洗的效果。
2、本发明的目的可通过下列技术方案来实现:一种用于模具清洗的智能控制方法,包括如下步骤:
3、s1、通过视觉识别技术对待清洗模具进行三维重建,获得待清洗模具的三维点云模型;
4、s2、对待清洗模具进行从上到下从左到右的全方面清洗;
5、s3、清洗后,基于步骤s1获得的三维点云模型,根据视觉复杂区域识别算法、视觉深腔识别算法、视觉孔位识别算法分别识别出复杂区域、深腔区域及孔位区域,并通过视觉识别技术识别待清洗模具的位姿信息,基于识别的位姿信息确定复杂区域、深腔区域和孔位区域的3d位置;
6、s4、增强水压压力,针对步骤s3确定的复杂区域、深腔区域和孔位区域的3d位置进行高压不同角度的喷洗;
7、s5、再次通过视觉识别技术对待清洗模具进行视觉识别,判断待清洗模具是否存在脏污区域,若存在脏污区域,针对脏污区域的3d位置进行高压喷洗直到不存在脏污区域。
8、模具部件在机床上进行铣削后,通过本用于模具清洗的智能控制方法对其进行清洗,首先建立待清洗模具的三维点云模型,之后对待清洗模具进行全方面喷洗,可清洗掉大部分的铁屑等脏污,以上两步骤的顺序可进行调换。在全方面喷洗完成后,为了确保待清洗模具的清洗效果,对复杂区域、深腔区域及孔位区域进行识别,针对这些区域进行逐个专项定点定位进行喷冲、喷洗,保证这些区域能够被充分喷洗到,经过专项喷洗后对待清洗模具进行再次视觉识别,确认待清洗模具是否清洗干净,若还存在脏污区域,则对脏污区域所在的位姿进行再次高压喷洗直到待清洗模具不存在脏污区域,则清洗完成。本方法通过视觉识别技术实现了模具的自动清洗,还能够识别出复杂区域、深腔区域、孔位区域及脏污区域并对其进行专项定点清洗,提高了模具清洗的效果。
9、在上述的用于模具清洗的智能控制方法中,在所述步骤s1中,通过视觉识别技术对待清洗模具进行三维重建的操作包括:
10、将待清洗模具放置于旋转台上,通过控制旋转台360度多角度转动来采集待清洗模具的全方位图像信息,获得待清洗模具的多视角图像序列;
11、使用sift算法检测多视角图像序列中各图像的特征点和对应的特征描述子,使用特征描述子对相邻图像进行特征点匹配,获得特征点匹配结果;
12、基于特征点匹配结果,使用sfm算法进行稀疏重建,获得稀疏三维重建结果;
13、基于稀疏三维重建结果和摄像头的内外参数,使用mvs算法进行稠密重建,获得每个像素点的3d点云;
14、将3d点云转化为3d点云模型,从而获得待清洗模具的三维点云模型。sift,即尺度不变特征变换(scale-invariant feature transform,sift),是用于图像处理领域的一种描述。这种描述具有尺度不变性,可在图像中检测出关键点,是一种局部特征描述子。sfm算法是一种基于各种收集到的无序图片进行三维重建的离线算法,该算法通过对匹配后的图像序列进行分析和处理,推断出物体的三维结构和相机的运动轨迹。mvs(multi-viewstereo)是一种多视图三维重建算法,用于对照片中的每个像素点进行匹配,重建每一个像素点的三维坐标。摄像头的内外参数包括镜头畸变参数、内参矩阵、旋转矩阵、平移向量、相机坐标系和世界坐标系,通过估计相机的内外参数,可以实现相机坐标系与世界坐标系之间转换,确定空间点的三维位姿。稀疏重建是指在sfm算法中,只重建相机观察到的一部分关键点的三维位置,而非所有图像中的像素点,这样可以减少计算量并提高重建效率。
15、在上述的用于模具清洗的智能控制方法中,在所述步骤s2中,对待清洗模具进行从上到下从左到右的全方面清洗之前还包括摆正待清洗模具的步骤,操作包括:
16、摄取待清洗模具不同角度下的多个图像,对各图像进行分析获取待清洗模具在旋转台坐标系下的位姿信息;
17、将上述获得的位姿信息与预设的目标位姿进行比较,获取待清洗模具的偏差角度;
18、根据偏差角度控制旋转台进行转动直至待清洗模具摆正。在全面清洗前进行待清洗模具的摆正,能够使待清洗模具根据预设的路径进行全方面地清洗,控制更加简便且有效提高了清洗效率。
19、在上述的用于模具清洗的智能控制方法中,在所述步骤s2中,获取待清洗模具在旋转台坐标系下的位姿信息的操作包括:
20、对于摄取的每个图像,使用特征点检测算法提取图像中的关键点及对应的关键点描述子;
21、将当前图像的特征描述子与步骤s1中使用sfm算法进行稠密重建得到的特征描述子进行匹配,获得特征描述子的匹配关系;
22、通过对特征描述子的匹配关系进行分析和计算,获得当前图像中待清洗模具在旋转台坐标系下的位姿信息。特征点检测算法可采用sift算法。
23、在上述的用于模具清洗的智能控制方法中,在所述步骤s2中,还包括通过非线性优化或最小二乘对待清洗模的位姿信息进行优化的操作。对位姿进行优化,实现位姿地精细调整,以进一步提高位姿估计的准确性。
24、在上述的用于模具清洗的智能控制方法中,在所述步骤s2中,将上述获得的位姿信息与预设的目标位姿进行比较的操作包括:
25、获得的位姿信息包括平移向量tc和旋转矩阵rc;预设的目标位姿包括平移向量tt和旋转矩阵rt;
26、计算平移向量偏差,获得平移向量偏差tdiff=tc–tt;
27、计算旋转矩阵之间的距离,转换为旋转角度偏差angle,angle=acos((trace(rc^t*rt)-1)/2);
28、平移向量偏差tdiff和旋转角度偏差angle组合成调节待清洗模具摆正的控制参数。
29、在上述的用于模具清洗的智能控制方法中,在所述步骤s3中,所述视觉复杂区域识别算法、视觉深腔识别算法、视觉孔位识别算法的识别操作均包括:
30、获取待清洗模具的3d点云设计模型;
31、将步骤s1中三维重建的三维点云模型通过icp算法与3d点云设计模型进行3d点云配准,获得3d点云设计模型和三维点云模型的映射关系;
32、使用pointnet算法进行3d点云设计模型的点云分割,获得复杂区域、深腔区域和孔位区域的分割结果,进而根据3d点云设计模型和三维点云模型的映射关系,获得复杂区域、深腔区域和孔位区域位于待清洗模具上的位置。icp算法(iterative closest point)算法是一种常用的迭代最近点匹配算法,常用于点云数据的配准和对齐。在物料识别中,icp算法可以用于两个3d点云的配准,即将重建的带清洗模具模型与实时采集的点云数据进行对齐。通过迭代最近点匹配和优化,icp算法可以找到最优的变换矩阵,将两个点云进行配准,从而得到准确的物料姿态信息。这样就可以对复杂区域、深腔局域和孔位位置进行识别和定位。pointnet算法是一种用于点云处理的深度学习算法,它可以用于点云的分割任务。
33、在上述的用于模具清洗的智能控制方法中,在所述步骤s4中,针对步骤s3确定的复杂区域、深腔区域和孔位区域的3d位置进行高压不同角度的喷洗的操作包括:
34、根据复杂区域、深腔区域和孔位区域所在的3d位置控制旋转台进行转动并控制喷枪对准复杂区域、深腔区域或孔位区域,以实现对复杂区域、深腔区域和孔位区域进行逐个喷冲清洗。
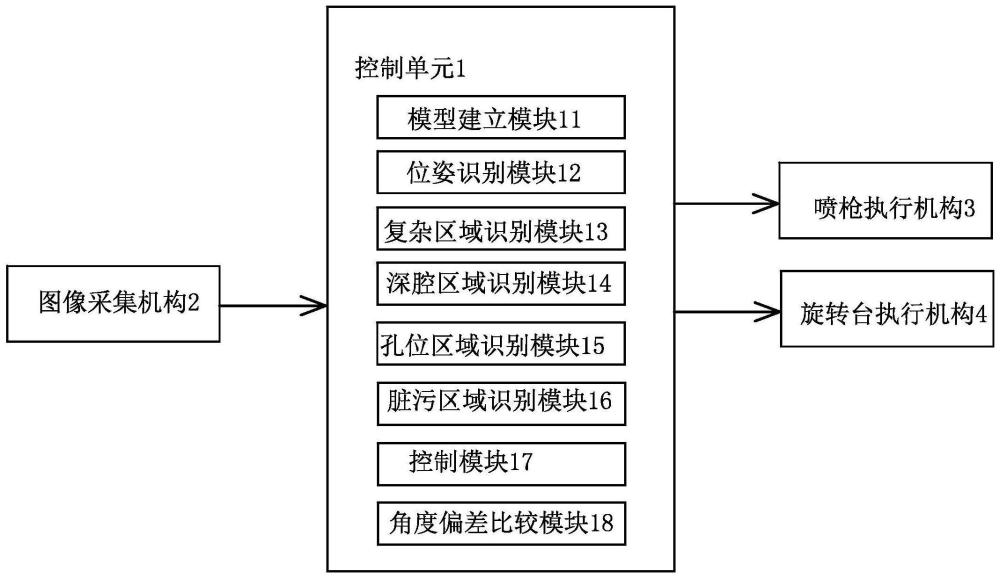
35、一种用于模具清洗的智能控制系统,包括控制单元以及与所述控制单元连接的用于使旋转台360°转动的旋转台执行机构、用于调节喷枪喷射位置和角度的喷枪执行机构及用于摄取待清洗模具全方位图像信息的图像采集机构,所述控制单元包括:
36、模型建立模块,用于对图像采集机构采集的全方位图像信息进行视觉识别,建立待清洗模具的三维点云模型;
37、位姿识别模块,用于对图像采集机构采集的全方位图像信息进行视觉识别,获取待清洗模具在旋转台坐标系下的位姿信息;
38、复杂区域识别模块,用于根据建立的三维点云模型、位姿信息和预存储的3d点云设计模型识别出复杂区域位于待清洗模具上的3d位置;
39、深腔区域识别模块,用于根据建立的三维点云模型、位姿信息和预存储的3d点云设计模型识别出深腔区域位于待清洗模具上的3d位置;
40、孔位区域识别模块,用于根据建立的三维点云模型、位姿信息和预存储的3d点云设计模型识别出孔位区域位于待清洗模具上的3d位置;
41、脏污区域识别模块,用于根据建立的三维点云模型、位姿信息和预存储的3d点云设计模型识别出待清洗模具上是否存在赃物区域,并在存在脏污区域时识别其3d位置;
42、控制模块,用于根据复杂区域、深腔区域、孔位区域和脏污区域的3d位置以及预设的控制策略输出相应的控制指令给旋转台执行机构、喷枪执行机构和图像采集机构。
43、模具部件在机床上进行铣削后,通过本用于模具清洗的智能控制系统对其进行清洗,首先将待清洗模具放置于旋转台上,通过旋转台执行机构控制旋转台360°转动,以实现图像采集机构对待清洗模具的全方位图像摄取,控制单元中的模型建立模块对图像采集机构采集的全方位图像信息进行视觉识别,建立待清洗模具的三维点云模型,位姿识别模块对待清洗模具在旋转台坐标系下的位姿信息进行识别,控制模块根据预设的控制策略,即本用于模具清洗的智能控制方法中的控制步骤来输出对应的控制指令,首先输出控制指令给喷枪执行机构,控制其对待清洗模具进行全方面喷洗,由此清洗掉大部分的铁屑等脏污。在全方面喷洗完成后,为了确保待清洗模具的清洗效果,由复杂区域识别模块、深腔区域识别模块和孔位区域识别模块对复杂区域、深腔区域及孔位区域进行识别,控制模块根据识别结果,控制喷枪执行机构和旋转台执行机构动作,使喷枪对这些区域的所在位置进行逐个专项定点定位地喷冲、喷洗,保证这些区域能够被充分喷洗到,经过专项喷洗后图像采集机构再次摄取待清洗模具的全方位图像信息,通过脏污识别模块识别待清洗模具是否存在脏污区域,在还存在脏污区域时,则对脏污区域所在的位置进行再次高压喷洗直到待清洗模具不存在脏污区域,则清洗完成。本系统能够实现模具的自动清洗,还能够识别出复杂区域、深腔区域、孔位区域及脏污区域并对其进行专项定点清洗,提高了模具清洗的效果。
44、在上述的用于模具清洗的智能控制方法中,所述控制单元还包括:
45、角度偏差比较模块,用于将待清洗模具在旋转台坐标系下的位姿信息和预设的目标位姿进行比较,获取待清洗模具的偏差角度;
46、所述控制模块用于根据偏差角度控制旋转台执行机构工作以摆正待清洗模具。
47、与现有技术相比,本用于模具清洗的智能控制方法及系统能够实现模具的自动清洗,对于孔位区域、复杂区域、深腔区域和脏污区域还能够实现自动识别,并对这些区域进行定点定位喷洗,清洗更加全面干净,有效提高了模具清洗的清洗效果。
- 还没有人留言评论。精彩留言会获得点赞!