一种高精度不等分均匀分度仪系统和算法
本发明涉及嵌入式开发,特别涉及一种高精度不等分均匀分度仪系统和算法。
背景技术:
1、在一些精密仪器仪表的表盘分度、齿轮加工以及数控机床各种等分的形面加工中,经常需要数控转台能够手动或自动地均匀分度,即将360度圆周在一定精度下任意等分。等分数数控转台精度描述采用分度精度和重复精度两个指标,规定了在每个分度位置及转动一周位置的精度要求。
2、不等分加工存在以下难点问题:若在360°圆周上数控转台需要产生23个均匀分度,假设转台旋转一周步进电机需要走32000步,则每个分度步进电机需要走1391.304步,每个分度为15.652°,而步进电机的步进单位为1步,0.304步是无法实现的,若采用四舍五入的方法,取1391步为一次分度走步数量,在每个分度都会增加0.304步的误差,走一个圆周23步后会累积误差-7步,回不到零点。若分度数越大,累积误差也越大。上述问题可以通过若适当增加取1392步为一次分度走步数量的次数,从而在走步过程中不断修补单个分度误差及总分度误差,走1392步的分度次数应该占比为30.4%。但是现有的方法不能保证单个分度误差、相邻分度误差、总分度误差最小;目前在一些精密仪器仪表的表盘分度、齿轮加工以及数控机床各种等分的形面加工中,缺乏高精度任意等分均匀分度设备;现有的均匀分度台大多数运用plc进行控制,控制成本高,精度低。
技术实现思路
1、本发明的目的是克服现有技术缺陷,提供一种高精度不等分均匀分度仪系统和算法,解决转台按不等分分度旋转一周可能出现的回不到零点的问题,保证加工中单个分度误差、相邻分度误差、总分度误差同时达到最小;并且能够在保证高精度的条件下实现0-999之间的任意等分。
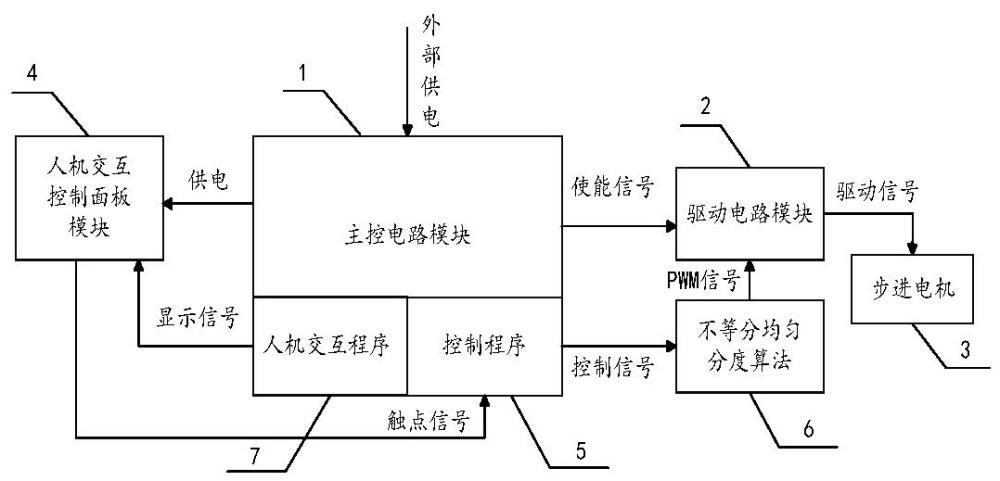
2、本发明的目的一方面是这样实现的:一种高精度不等分均匀分度仪系统,其特征在于,包括人机交互控制面板模块、主控电路模块、驱动电路模块和步进电机;
3、所述主控电路模块用于发送使能信号,使能驱动电路模块,然后执行人机交互程序确定相应的系统状态,通过rgb液晶接口向人机交互控制面板模块发送显示信号;通过不等分均匀分度算法得出进行分度所需的脉冲数,向驱动电路模块发送pwm信号;
4、所述人机交互控制面板模块用于向主控电路模块实时发送触点信号,主控电路在收到触点信号后,根据控制程序执行相应的分度任务,并通过触摸屏显示分度仪系统的当前信息;
5、所述驱动电路模块用于根据不等分均匀分度算法,输出驱动信号,驱动步进电机的旋转;
6、所述步进电机用于接收驱动电路模块的驱动信号,根据相应的指令实现平滑运动,到达相应位置,完成分度任务;
7、所述主控电路模块与人机交互控制面板模块、驱动电路模块电连接;所述驱动电路模块与步进电机电连接。
8、作为本发的进一步限定,所述主控电路模块包括主控芯片和外围电路模块;
9、所述主控芯片用于通过rgb液晶接口驱动触摸屏,实现人机交互;并根据触点信号执行相应的控制程序,向驱动板接口电路发送使能信号,同时调用基于插补的步进电机高精度不等分均匀分度算法进行分度。
10、所述外围电路模块用于通过降压电路为主控芯片提供供电电源,同时为驱动电路模块提供供电电源;并将主控芯片上的引脚信号引出,并与驱动电路模块相连接;所述引脚信号包括pwm脉冲信号、spi通信信号、步进电机使能信号和步进电机运行反馈信号。
11、作为本发的进一步限定,所述外围电路模块包括电池电压输入电路、高侧过压输入保护ic电路、dcdc5v稳压电路、ldo3v3稳压电路、核心板供电电路、保护隔离电路和驱动板接口电路;
12、所述电池电压输入电路与高侧过压输入保护ic电路电连接,用于输入12v电压u1;
13、所述高侧过压输入保护ic电路分别与dcdc5v稳压电路、ldo3v3稳压电路电连接,将电压u5分别通过dcdc5v稳压电路和ldo3v3稳压电路;
14、所述ldo3v3稳压电路用于将电压u5降压至3.3v电压u2,通过驱动板接口电路接入驱动电路模块;
15、所述dcdc5v稳压电路用于将电压u5降压至5v电压u4,u4一路接入人机交互控制面板模块,用于供电;另一路接入保护隔离电路,再通过核心板供电电路输入电压u3,为主控芯片进行供电。
16、作为本发的进一步限定,所述驱动电路模块包括spi驱动模式和独立操控模式;
17、所述spi驱动模式通过主控电路发送高低电平配置驱动电路模块引脚,从而确定模式的选择;spi驱动模式需将驱动板上的sd_mode引脚和spi_mode引脚接入高电平使能,通过spi接口来设置步进电机控制驱动芯片的寄存器,最大完成128微步的细分设置,最后通过脉冲和方向引脚来控制步进电机运动;
18、所述独立操控模式通过主控电路发送高低电平配置驱动电路模块引脚,从而确定模式的选择;独立操控模式需将驱动板上的sd_mode引脚接入高电平,spi_mode引脚接入低电平使能此模式;配置驱动电路的硬件引脚cfg1和cfg0的高低电平完成8,16,32,64微步的细分设置,最后通过脉冲和方向引脚来控制步进电机运动。
19、作为本发的进一步限定,所述人机交互控制面板模块包括数值显示界面、参数设定界面和说明界面;
20、所述数值显示界面用于显示当前分度仪系统的等分参数;所述数值显示界面上设有启动按键、动作按键、停止按键和设置按键;通过触摸屏按下启动按键,根据用户设定的等分参数启动分度系统;通过触摸屏按下动作按键,系统则根据基于插补的步进电机高精度不等分均匀分度算法给出的步进数执行一次分度任务;通过触摸屏按下停止按键,停止当前的分度任务,用户重新设定参数,执行新一次的分度任务;通过触摸屏按下设置按键进入参数设定界面。
21、所述参数设定界面用于显示和设定等分参数,并设有返回按键和说明按键,通过触摸屏按下返回按键,返回第一个界面即数值显示界面;通过触摸屏按下说明按键,即进入说明界面;
22、所述说明界面用于显示高精度不等分均匀分度仪的基本介绍和使用说明。
23、作为本发的进一步限定,所述等分参数包括输入齿数、分度脉冲当量、输入脉冲、运行速度和运行方向;所述输入齿数为需要设定的分度数;所述分度脉冲当量等于步进电机的步距角除以驱动器的细分数,再除以从电动机转轴到需要分度工件的减速比;所述输入脉冲等于通过计算好的脉冲数值即360除以分度脉冲当量;所述运行速度为步进电机在单位时间内步进电机旋转步数的多少;所述运行方向即步进电机的旋转方向。
24、作为本发明的进一步限定,所述主控电路模块采用stm32系列单片机。
25、本发明的目的另一方面是这样实现的:一种高精度不等分均匀分度算法,所述不等分均匀分度算法包括以下步骤:
26、1)首先确定预置分度数fs和总步数d,分度偏差f;
27、2)判断总步数d是否能被预置分度数fs整除;
28、2-1)若能整除,则是均匀分度,此时大步步数ta等于小步步数tb,步进电机只需要走ta或tb步即可,当分度数计数器等于0时,则分度任务完成;
29、2-2)若不能整除,则是不均匀分度,此时大步步数ta=d/fs+1,小步步数tb=d/fs;
30、3)根据式fb=fs×tb-d得到小步误差修正值fb;小步误差修正值fb等于预置分度数fs与小步步数tb的乘积减去被分度的工件转动一周步进电机应走的步数d;
31、4)根据式fa=fs×ta-d得到大步误差修正值fa,大步误差修正值fa等于预置分度数fs与大步步数ta的乘积减去被分度的工件转动一周步进电机应走的步数d;
32、5)当步进电机在向下一个分度位置走步之前先判定当前分度位置上的分度偏差f,步进电机在当前分度位置上的偏差等于当前偏差f加上小步误差修正值fb或大步误差修正值fa;若分度偏差f大于或等于0,步进电机向下一个分度走小步步数tb,若偏差小于0,步进电机向下一个分度走大步步数。
33、本发明采用以上技术方案,与现有技术相比,有益效果为:采用了自研的基于插补的步进电机高精度不等分均匀分度算法,以分度数和步进电机转动步数构成坐标平面的横轴和纵轴,并且同时通过大步步数,小步步数修正均匀分度误差,能够较好地解决转台按分度旋转一周可能会出现的回不到零点的问题,保证单个分度误差、相邻分度误差、总分度误差最小。采用接口丰富、设计灵活度高、成本较低的单片机进行控制,用户可以根据不同的运用场景,选择相应的分度模式与参数。基于单片机的高精度不等分均匀分度仪成本低、精度高,运用场景更加广泛,能够较好地弥补现在工业市场上分度仪的不足。
- 还没有人留言评论。精彩留言会获得点赞!