立式钢骨架焊接机器人的制作方法
本技术涉及钢骨架焊接的,尤其是涉及立式钢骨架焊接机器人。
背景技术:
1、钢骨架是多个钢筋组合在一起,形成一个完整的网架,形象的称之为钢筋笼或钢筋骨架,一个完整的钢骨架有利于约束混凝土,提高混凝土构件的整体性。
2、传统焊接钢骨架是将钢筋排布在地面上,工人在地面上进行焊接。
3、工人在地面上焊接钢骨架需要不断的水平移动,从而将各个焊接点焊接完毕,不断的在水平方向变换位置,影响焊接效率,且焊接质量与工人的熟练度有关。
技术实现思路
1、为了提升钢骨架焊接时的焊接效率,保证焊接质量,本技术提供立式钢骨架焊接机器人。
2、本技术提供的立式钢骨架焊接机器人采用如下技术方案:
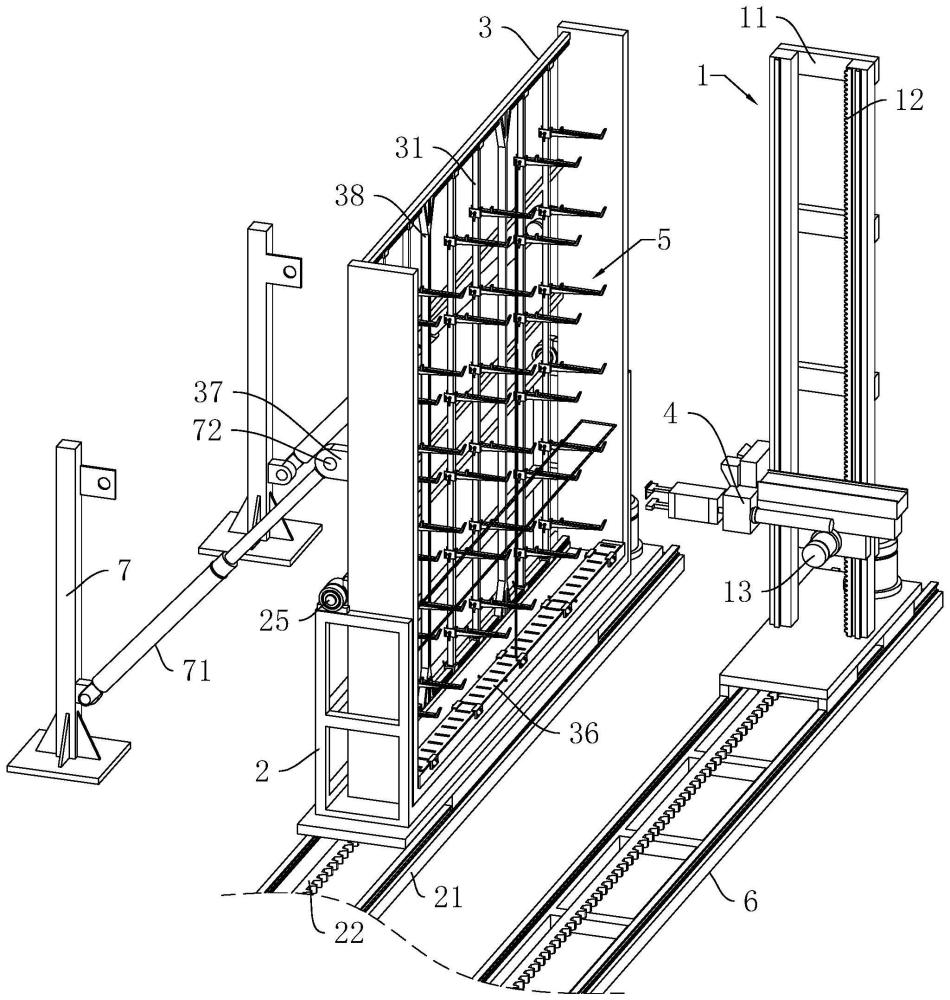
3、立式钢骨架焊接机器人,包括升降组件、支撑架、钢筋摆架和用于焊接钢骨架的机器人本体;
4、所述升降组件包括升降架、第一齿条、第一电机和第一齿轮,第一电机与机器人本体固定连接,第一齿轮环套固定在第一电机的转动轴上,第一齿条竖直固定在升降架上,第一齿轮与第一齿条啮合,机器人本体与升降架滑动连接;
5、所述支撑架滑动设置于所述升降架一侧,所述支撑架沿水平方向滑动;支撑架移动时,机器人本体与支撑架之间的最短距离保持不变;
6、所述钢筋摆架竖直架设在支撑架上,所述钢筋摆架用于钢筋的摆放。
7、通过采用上述技术方案,将钢筋摆架竖直放置在支撑架上,然后将钢骨架焊接时所需要的纵筋和横筋摆放到钢筋摆架上,启动机器人本体对纵筋和横筋进行焊接,当需要移动焊接位置时,移动支撑架即可实现焊接位置水平方向的改变,启动第一电机,第一电机通过第一齿轮和第一齿条的传动实现机器人本体竖直方向位置的改变,最终实现了焊接位置竖直方向的改变,且焊接机器人能够保证稳定的焊接效果,整个装置取代了人工手持焊枪移动,达到了提升钢骨架焊接时的焊接效率的效果,同时也保证了焊接质量。
8、可选的,所述钢筋摆架为矩形框架状,钢筋摆架内滑动设置有立杆,立杆沿钢筋摆架底边长度方向滑动,立杆上滑动设置有多个托架组件,相邻托架组件沿立杆长度方向滑动且间隔布置;
9、所述托架组件包括拖杆、u形板、限位螺栓和第一顶丝执手,限位螺栓贯穿u形板开口端,限位螺栓连同u形板环套在立杆上,拖杆垂直立杆设置,拖杆一端固定在u形板上,另一端呈悬挑状态,第一顶丝执手用于锁定u形板在立杆上的位置。
10、通过采用上述技术方案,限位螺栓连同u形板形成封闭环状,从而环套在立杆上,实现拖杆在立杆上滑动且不脱离立杆的效果,通过转动第一顶丝执手,将u形板固定在立杆外壁上,对拖杆滑动到合适位置后起到了限位效果。拖杆位置调节后,可以适配不同造型、不同间距的钢筋,使钢筋能够放置在拖杆上。
11、可选的,所述钢筋摆架底部内壁以及顶部内壁上均固定有滑轨,滑轨长度方向沿所在的钢筋摆架底部或顶部长度方向设置,立杆端部固定有滑块,滑块在滑轨上滑动,滑块上设置有用于锁定滑块位置的第二顶丝执手。
12、通过采用上述技术方案,滑块在滑轨上滑动,当滑动到指定位置后通过转动第二顶丝执手将滑块定位在滑轨上,从而实现立杆位置调整后的定位,立杆可以在水平方向上进行位置的调整,达到适配不同造型钢筋、不同间距钢筋摆放的效果。
13、可选的,所述拖杆上固定有限位块,限位块位于拖杆顶部且位于靠近u形板处,拖杆远离u形板一端逐渐向上翘起。
14、通过采用上述技术方案,拖杆悬挑的端部向上翘起使放置在拖杆上的钢筋不易从拖杆上滑落,同时限位块对放置在拖杆上的钢筋也起到了限位的效果。
15、可选的,所述拖杆顶部固定有磁条,磁条位于限位块和拖杆翘起的端部之间。
16、通过采用上述技术方案,放置在拖杆上的钢筋被磁条磁性吸附,进一步提升了钢筋放置在拖杆上的稳定性。
17、可选的,所述钢筋摆架底部内壁上设置有u形条板和活动板,u形条板长度方向沿钢筋摆架底部长度方向设置,u形条板倒扣固定在钢筋摆架上,u形条板上开设有多个第一条孔,相邻第一条孔沿u形条板长度方向间隔开设,第一条孔自身长度方向沿垂直u形条板长度方向设置,活动板滑动设置在u形条板上,活动板滑动方向沿u形条板长度方向滑动,活动板上开设有过的第二条孔,相邻第二条孔沿活动板长度方向间隔开设,第二条孔自身长度方向沿垂直活动板长度方向设置;相邻第二条孔之间的距离与相邻第一条孔之间的距离相同。
18、通过采用上述技术方案,横筋放置在拖杆上,纵筋插嵌在第一条孔内,u形条板为第一条孔的开设提供了开设场地,移动滑动板,使第一条孔和第二条孔产生错位,从而调整了纵筋底部可以插嵌的空间大小,实现了对纵筋插嵌后的限位,也使钢筋摆架能够适应不同直径的钢筋。
19、可选的,所述支撑架与地面之间设置有第一导轨,第一导轨上固定有第二齿条,第二齿条沿第一导轨长度方向设置,支撑架外壁上竖直固定有第二电机,第二电机的转动轴上环套固定有第二齿轮,第二齿轮和第二齿条啮合,第二齿轮与第二齿条啮合,支撑架在第一导轨上滑动。
20、通过采用上述技术方案,第二电机转动,第二电机通过第二齿轮和第二齿条的啮合传动,实现了支撑架在第一导轨上的滑动,支撑架移动带动钢筋摆架移动,实现了钢骨架的移动,便于对钢骨架上各个焊接点的焊接,提升了对钢骨架的焊接效率,当钢骨架焊接完毕后,也便于钢骨架后续的运送。
21、可选的,所述升降架与地面之间设置有第二导轨,升降架在第二导轨上滑动;第二导轨与第一导轨平行设置。
22、通过采用上述技术方案,升降架能够在第二导轨上移动,实现了机器人本体相对钢骨架移动的效果,进一步提升了机器人本体对钢骨架上各个焊接点的焊接效率。
23、可选的,所述支撑架顶部设置有翻转轴,翻转轴水平设置,翻转轴位于支撑架长度方向的竖直侧壁顶部,钢筋摆架的竖直侧壁上固定有挂耳;支撑架背离机器人本体一侧设置有支架,支架上设置有油缸,油缸本体一端与支架转动连接,油缸的转动轴与翻转轴平行设置,油缸活塞一端插嵌有活动销,活动销与挂耳插嵌连接。
24、通过采用上述技术方案,支架为油缸提供支撑点,活动销插嵌在挂耳内后,油缸活塞运动,带动钢筋摆架由竖直状态变为水平状态;钢骨架焊接时,钢筋摆架为竖直状态,钢骨架焊接完毕后,钢筋摆架转动调整为水平状态,从而厂房内的龙门吊将钢骨架吊走,钢筋摆架能够转动便于后续的钢骨架运输。
25、可选的,所述机器人本体上设置有补光灯。
26、通过采用上述技术方案,开启补光灯对焊接的位置进行打光,从而使机器人本体在明亮的环境中进行焊接。
27、综上所述,本技术包括以下至少一种有益技术效果:
28、1.机器人本体配合升降组件以及第二导轨实现了对钢骨架焊接时水平方向和竖直方向的位置变化,提升了焊接效率,同时保证了统一的焊接质量;
29、2.翻转轴和油缸的设置使钢筋摆架有两种状态,钢筋摆架为竖直状态时为钢骨架焊接时,钢筋摆架为水平状态时为钢骨架焊接完毕需要吊装运输时;
30、3.托架组件的设置能够适应不同造型和间距的钢筋排布,对钢筋起到承托和限位作用。
- 还没有人留言评论。精彩留言会获得点赞!