一种焊机的传感方法、装置及焊机与流程
本发明属于焊接,尤其针对逆变焊机搭配机器人或者专机系统实现中厚板焊接的领域,具体涉及一种焊机的传感方法、装置及焊机。
背景技术:
1、对于使用通用逆变焊机在厚板焊接领域,高压传感是不可或缺的一项功能。在众多中厚板构造物的焊接工程中,以提高生产效率,实现稳定,均匀焊接为目的的自动化焊接已经得到广泛应用,因此精确的焊缝传感技术是保证焊接精准的重要因素,也是实现焊接自动化的重要手段。
2、在这一背景下,焊缝传感技术得以推广,但传统的焊缝传感技术需要配备独立的高压传感器,该方式成本高、实时响应度低、现场连接线繁琐。独立的高压传感器内含大功率的交流接触器和限流电阻,匹配独立的控制器,控制时序繁琐,实现成本也比较高,而且交流接触器动作耗时较长,实时的响应度变慢,而且高压传感器回路需要并入焊接系统,现场连线较为繁琐。
技术实现思路
1、为解决现有技术中的不足,本发明提供一种焊机的传感方法、装置及焊机,能有效提高焊缝传感过程中的实时响应度,同时降低了焊缝传感技术的成本,降低了焊缝传感技术的复杂度。
2、为达到上述目的,本发明所采用的技术方案是:
3、第一方面,提供一种焊机的传感方法,包括:输出传感电压,所述传感电压为焊机空载电压;对所述传感电压进行持续采样,得到采样电压;计算采样电压的平均值,并根据采样电压的平均值判断焊丝与母材的相对状态。
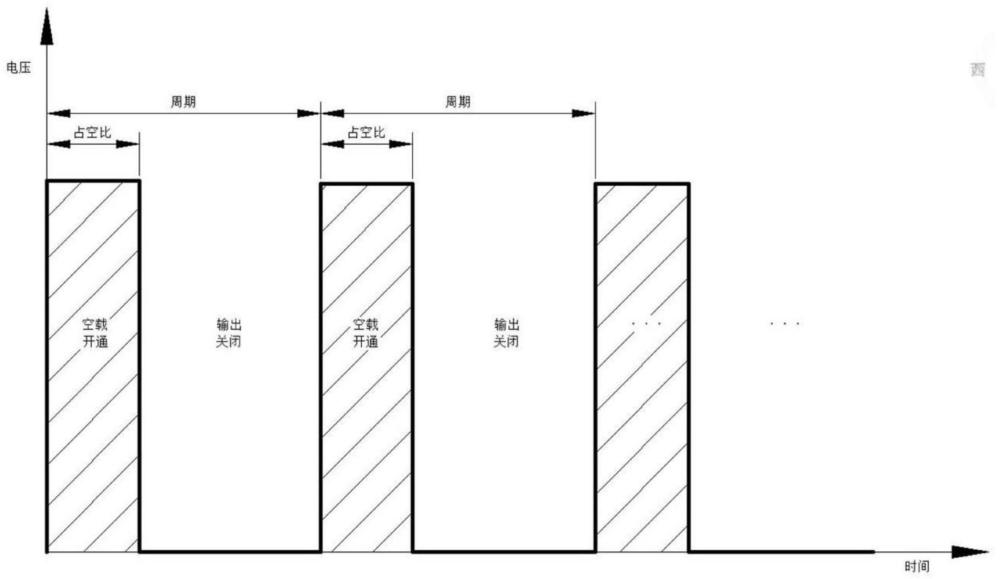
4、进一步地,作为传感电压输出的焊机空载电压以高频脉冲方式输出。
5、进一步地,根据采样电压的平均值判断焊丝与母材的相对状态,包括:当采样电压的平均值高于设定阈值时,判断为:焊丝与母材未接触;当采样电压的平均值低于设定阈值时,判断为:焊丝与母材接触。
6、进一步地,在焊丝与母材接触瞬间,传感回路产生电流,当所述电流高于电流设定值时:若焊机处于空载开通阶段,则切换焊机的开通模式为低压开通模式;若焊机处于输出关闭阶段,则不做任何处理。
7、进一步地,当焊丝与母材接触断开时,传感回路的电流消失,若此时焊机正处于低压开通阶段,则直接切换至高压开通模式;若此时焊机正处于输出关闭阶段,则保持上一输出开通模式。
8、进一步地,当首次启动传感时,空载输出占空比以最大值输出,随着传感持续时间,空载输出占空比逐渐减小。
9、进一步地,当传感停止后,空载输出占空比指令随空闲时间逐渐增大,当再次启动传感时,按当前占空比指令值输出,并随着传感持续时间,空载输出占空比再次逐渐减小。
10、进一步地,当传感停止后,再启动时,计算间隔时间,生成最终占空比。
11、第二方面,提供一种焊机的传感装置,包括:传感电压输出模块,用于输出传感电压,所述传感电压为焊机空载电压;传感电压采样模块,用于对所述传感电压进行持续采样,得到采样电压;传感控制模块,用于计算采样电压的平均值,并根据采样电压的平均值判断焊丝与母材的相对状态。
12、第三方面,提供一种焊机,所述焊机配置有第二方面所述的焊机的传感装置。
13、与现有技术相比,本发明所达到的有益效果:本发明通过以焊机空载电压为传感电压进行输出;对传感电压进行持续采样,得到采样电压;计算采样电压的平均值,并根据采样电压的平均值判断焊丝与母材的相对状态;能有效提高焊缝传感过程中的实时响应度,同时降低了焊缝传感技术的成本,降低了焊缝传感技术的复杂度。
技术特征:
1.一种焊机的传感方法,其特征在于,包括:
2.根据权利要求1所述的焊机的传感方法,其特征在于,作为传感电压输出的焊机空载电压以高频脉冲方式输出。
3.根据权利要求2所述的焊机的传感方法,其特征在于,根据采样电压的平均值判断焊丝与母材的相对状态,包括:
4.根据权利要求3所述的焊机的传感方法,其特征在于,在焊丝与母材接触瞬间,传感回路产生电流,当所述电流高于电流设定值时:
5.根据权利要求4所述的焊机的传感方法,其特征在于,当焊丝与母材接触断开时,传感回路的电流消失,若此时焊机正处于低压开通阶段,则直接切换至高压开通模式;若此时焊机正处于输出关闭阶段,则保持上一输出开通模式。
6.根据权利要求1所述的焊机的传感方法,其特征在于,当首次启动传感时,空载输出占空比以最大值输出,随着传感持续时间,空载输出占空比逐渐减小。
7.根据权利要求6所述的焊机的传感方法,其特征在于,当传感停止后,空载输出占空比指令随空闲时间逐渐增大,当再次启动传感时,按当前占空比指令值输出,并随着传感持续时间,空载输出占空比再次逐渐减小。
8.根据权利要求7所述的焊机的传感方法,其特征在于,当传感停止后,再启动时,计算间隔时间,生成最终占空比。
9.一种焊机的传感装置,其特征在于,包括:
10.一种焊机,其特征在于,所述焊机配置有权利要求9所述的焊机的传感装置。
技术总结
本发明公开了一种焊机的传感方法、装置及焊机,方法包括:输出传感电压,所述传感电压为焊机空载电压;对所述传感电压进行持续采样,得到采样电压;计算采样电压的平均值,并根据采样电压的平均值判断焊丝与母材的相对状态。本发明能有效提高焊缝传感过程中的实时响应度,同时降低了焊缝传感技术的成本,降低了焊缝传感技术的复杂度。
技术研发人员:何双旺,王伟,谷孝满
受保护的技术使用者:唐山松下产业机器有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!