六轴机器人两外部轴及传感器联动系统的制作方法
本发明涉及焊接,具体涉及一种六轴机器人两外部轴及传感器联动系统。
背景技术:
1、常见的六轴关节机器人内置有六个伺服电机,直接通过减速器、同步带轮等驱动六个关节轴的旋转。六轴工业机器人一般有6个自由度,包含旋转(s轴),下臂(l轴)、上臂(u轴)、手腕旋转(r轴)、手腕摆动(b轴)和手腕回转(t轴);6个关节合成实现末端的6自由度动作,具有高灵活性、超大负载、高定位精度等众多优点。六轴关节式机器人可用于自动装配、喷漆、搬运、焊接及后处理等工作,使用一直线轴重新定位,可以做出灵活得像人类一样的动作,机器人可以执行操作人员的指令。对于目前六轴机器人在焊接领域应用中,一般是一个外部轴与激光传感器联和动作,即该用于焊接的六轴机器人只能沿一个x轴方向进行运动,其不便于对焊缝位置出现的偏差进行跟踪及调节。
技术实现思路
1、本发明提供一种六轴机器人两外部轴及传感器联动系统,旨在解决的技术问题之一是:现有用于焊接的六轴机器人只能沿一个轴方向运动的技术问题。
2、考虑到现有技术的上述问题,根据本发明公开的一个方面,本发明采用以下技术方案:
3、一种六轴机器人两外部轴及传感器联动系统,其包括:
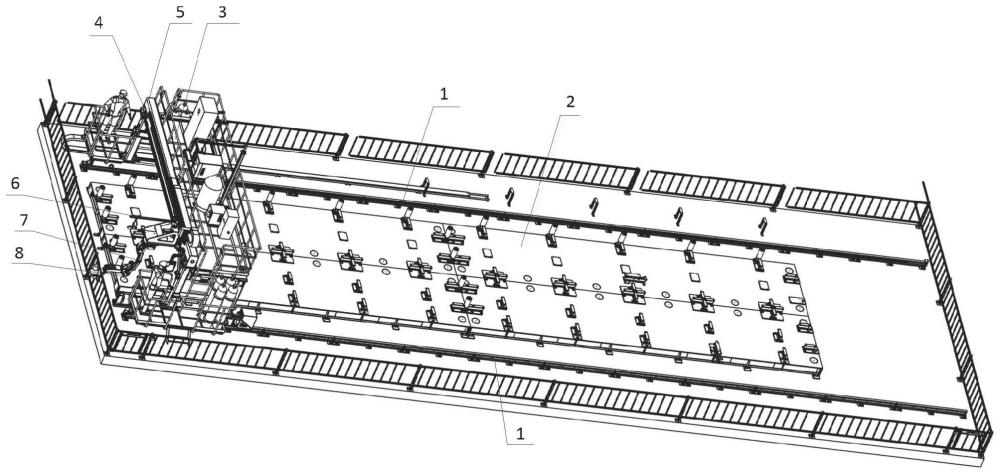
4、焊接机器人移动轨道,其为两条且分别设置于焊接平台两侧;
5、龙门机构,其两侧各与一焊接机器人移动轨道连接,所述龙门机构通过驱动装置使其能够在所述焊接机器人移动轨道移动,以实现x轴方向的运动;
6、横梁机器人机构,其包含横梁、机器人横向移动机构和六轴机器人,所述横梁设置于所述龙门机构上,所述六轴机器人与所述机器人横向移动机构连接,所述机器人横向移动机构能够沿所述横梁移动,以y轴方向的运动;
7、传感器,其设置于所述六轴机器人上,用于检测焊缝位置偏差将数据传到机器人控制器;
8、机器人控制器,用于接收所述传感器的数据,并向所述龙门机构和所述机器人横向移动机构发送运动控制数据,以实现x轴方向和y轴方向焊接位置的修正。
9、为了更好地实现本发明,进一步的技术方案是:
10、进一步地,所述龙门机构包括:
11、立柱机构,其为两个且各设置于一焊接机器人移动轨道上方;
12、平台围栏机构,其设置于两个所述立柱机构之间。
13、进一步地,所述平台围栏机构上设置机器人控制器、焊接电源、水箱、焊丝存储桶和烟尘净化器中一种或几种。
14、进一步地,所述立柱机构上设置操作盒。
15、进一步地,所述平台围栏机构上设置控制柜,所述控制柜与围栏之间设置控制柜支撑杆。
16、进一步地,所述机器人横向移动机构上设置线缆挂架。
17、进一步地,所述机器人横向移动机构包括:
18、横向导轨,其设置于所述横梁上;
19、滑板机构,其与所述横向导轨连接且能够沿所述横向导轨移动;
20、机器人安装架,其与所述滑板机构连接。
21、进一步地,所述滑板机构包括:
22、滑板;
23、电机,其固定在所述滑板上;
24、齿轮,其固定在所述电机工作轴上,对于的所述横梁上设置与所述齿轮配合的齿条。
25、进一步地,所述滑板与所述电机之间设置电机板。
26、进一步地,所述滑板上设置顶压调节螺杆机构,所述顶压调节螺杆机构的螺杆通过弹簧装置压在所述电机板侧面。
27、与现有技术相比,本发明的有益效果之一是:
28、本发明的一种本发明的六轴机器人两外部轴及传感器联动系统,其在现有六轴机器人上增设一个外部轴,使之能够x轴和y轴方向移动,以及增加了激光传感器。机器人运行过程中,激光传感器检测到焊缝位置偏差将数据传到机器人控制器,机器人可在x,、y移动方形将位置偏差进行修正。提升了焊接的质量和效率,降低了焊工的操作难度,减少了人工工作量。
技术特征:
1.一种六轴机器人两外部轴及传感器联动系统,其特征在于包括:
2.根据权利要求1所述的六轴机器人两外部轴及传感器联动系统,其特征在于所述龙门机构(3)包括:
3.根据权利要求2所述的六轴机器人两外部轴及传感器联动系统,其特征在于所述平台围栏机构(10)上设置机器人控制器(11)、焊接电源(12)、水箱(13)、焊丝存储桶(14)和烟尘净化器(15)中一种或几种。
4.根据权利要求2所述的六轴机器人两外部轴及传感器联动系统,其特征在于所述立柱机构(9)上设置操作盒(16)。
5.根据权利要求2所述的六轴机器人两外部轴及传感器联动系统,其特征在于所述平台围栏机构(10)上设置控制柜(17),所述控制柜(17)与围栏(18)之间设置控制柜支撑杆(19)。
6.根据权利要求1所述的六轴机器人两外部轴及传感器联动系统,其特征在于所述机器人横向移动机构(6)上设置线缆挂架(20)。
7.根据权利要求1所述的六轴机器人两外部轴及传感器联动系统,其特征在于所述机器人横向移动机构(6)包括:
8.根据权利要求7所述的六轴机器人两外部轴及传感器联动系统,其特征在于所述滑板机构(22)包括:
9.根据权利要求8所述的六轴机器人两外部轴及传感器联动系统,其特征在于所述滑板(24)与所述电机(25)之间设置电机板(27)。
10.根据权利要求9所述的六轴机器人两外部轴及传感器联动系统,其特征在于所述滑板(24)上设置顶压调节螺杆机构(28),所述顶压调节螺杆机构(28)的螺杆通过弹簧装置(29)压在所述电机板(27)侧面。
技术总结
本发明公开了一种六轴机器人两外部轴及传感器联动系统,其包括焊接机器人移动轨道、龙门机构、横梁机器人机构、传感器和机器人控制器;焊接机器人移动轨道为两条且分别设置于焊接平台两侧;龙门机构两侧各与一焊接机器人移动轨道连接,所述龙门机构通过驱动装置使其能够在所述焊接机器人移动轨道移动,以实现X轴方向的运动;横梁机器人机构包含横梁、机器人横向移动机构和六轴机器人,所述横梁设置于所述龙门机构上,所述六轴机器人与所述机器人横向移动机构连接,所述机器人横向移动机构能够沿所述横梁移动,以Y轴方向的运动。通过本发明提升了焊接的质量和效率,降低了焊工的操作难度,减少了人工工作量。
技术研发人员:李全华
受保护的技术使用者:四川科立达智能系统有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!