一种激光切割机器人的刀头清理装置的制作方法
本发明涉及激光切割设备刀头清理装置领域,具体为一种激光切割机器人的刀头清理装置。
背景技术:
1、激光切割机器人在机械臂的前端安装激光切割刀头,利用高功率密度激光束照射被切割材料,使材料很快被加热至汽化温度,蒸发形成孔洞,随着光束对材料的移动,孔洞连续形成宽度很窄的切缝,完成对材料的切割。
2、现有的激光切割机器人的激光切割刀头内大多安装有保护镜片,长时间进行切割工作后,保护镜片的底面会受到污染,保护镜片安装于一个能够滑动连接于激光切割刀头内的抽屉中,在对保护镜片进行清洗的时候,需要先抽出安装有保护镜片的抽屉,然后将保护镜片从抽屉中拆卸出,使用异丙醇或分析醇乙醇清洁镜片,完成保护镜片的清洁工作后再将保护镜片安装回抽屉中,并将抽屉插回激光切割刀头内。
3、针对上述相关技术,现有的激光切割机器人前端的激光切割刀头内的保护镜片采用人工清洗的方式效率较低,对于生产线上的多个激光切割机器人进行保护镜片的清洗工作需要拆装各个机械臂前端的激光切割刀头,在影响生产线的生产效率的同时,还会增加工人的劳动强度,并且人工拆卸激光切割刀头需要十分小心,避免在拆装的过程中损伤激光切割刀头内的零件,综上所述,现有的激光切割机器人的刀头清理较为麻烦,对于保护镜片的清理速度较慢,影响生产线的生产效率。
技术实现思路
1、基于此,本发明的目的是提供一种激光切割机器人的刀头清理装置,以解决现有的激光切割机器人的刀头清理较为麻烦,对于保护镜片的清理速度较慢,影响生产线的生产效率的技术问题。
2、为实现上述目的,本发明提供如下技术方案:一种激光切割机器人的刀头清理装置,包括第一盒体与第二盒体,所述第一盒体与第二盒体之间插入有刀头,所述刀头内滑动连接有抽屉,所述第一盒体与第二盒体内皆设置有推动结构,所述推动结构用于推出与拉回抽屉,所述第一盒体内在远离推动结构的一端转动设置有多根清扫棒,所述抽屉内上下滑动连接有镜片框,且与镜片框之间通过多个弹簧相接,所述镜片框内设置有镜片,所述第一盒体内设置有用于将镜片框压下的下压结构,所述镜片框被下压结构压下后,所述镜片的底面能够被多根清扫棒清扫。
3、通过采用上述技术方案,通过自动化清理的盒体结构,激光切割机器人只需将刀头伸入到盒体内即可自动完成对保护镜片的清理工作,保护镜片在清理完成后也能够自动复位,大幅提高了对于保护镜片的清理效率,降低了工人的劳动强度,进一步的实现了机械自动化。
4、本发明进一步设置为,所述第一盒体与第二盒体内皆设置有电动推杆,所述电动推杆连接有伸缩杆,所述伸缩杆的前端设置有凹槽,且在凹槽内设置有第二磁铁,所述抽屉对应伸缩杆的位置处固定连接有凸柱,所述凸柱的前端固定连接有能够与第二磁铁相吸的第一磁铁,所述第一磁铁的两侧皆固定连接有弹性卡片,所述刀头的侧壁上设置有供弹性卡片伸出的穿孔,所述伸缩杆能够通过穿孔伸入刀头内。
5、通过采用上述技术方案,利用第一盒体与第二盒体内的电动推杆控制伸缩杆的伸长与缩短,能够便捷的实现解除抽屉锁定状态并推出抽屉,或是将抽屉拉回刀头内并锁定抽屉的功能。
6、本发明进一步设置为,所述第一磁铁的直径与第二磁铁相同,所述凸柱的直径小于伸缩杆前端凹槽部分的内径,所述弹性卡片伸出穿孔时能够限制抽屉移动,所述弹性卡片能够卡入伸缩杆前端的凹槽内,所述伸缩杆的外径小于穿孔的直径。
7、通过采用上述技术方案,使得伸缩杆在伸长接触到弹性卡片的时候能够使得弹性卡片变形并收在伸缩杆前端的凹槽空间内,并且使得伸缩杆能够自由的插入到刀头内部。
8、本发明进一步设置为,所述第一盒体内设置有气杆,所述气杆的伸缩部分向下并固定连接有压框,所述压框能够与镜片框接触并将镜片框压下。
9、通过采用上述技术方案,镜片框被压框压下后,使得镜片框内的镜片的底面处于清扫棒的清扫范围内,在清扫棒的转动状态下,能够对镜片的底面进行有效的清洁。
10、本发明进一步设置为,所述镜片框的顶面固定设置有环形的压台,所述压框与压台相接触,且边缘处皆设置有朝向下方的凸起,所述压框设置有凸起的部分皆处于远离压台的位置。
11、通过采用上述技术方案,压框边缘的凸起能够很好的限制镜片框,避免镜片框发生水平面方向上的位移,使得清扫棒能对镜片进行更好的清扫。
12、本发明进一步设置为,所述第一盒体内固定连接有清扫电机,所述清扫电机的输出端固定连接有多根清扫棒,所述清扫棒的顶面能够与镜片的底面接触,且底面皆固定连接有叶片,所述叶片在清扫电机工作的时候能够产生向下流动的气流。
13、通过采用上述技术方案,有效避免了镜片的顶面受到灰尘等杂志的污染。
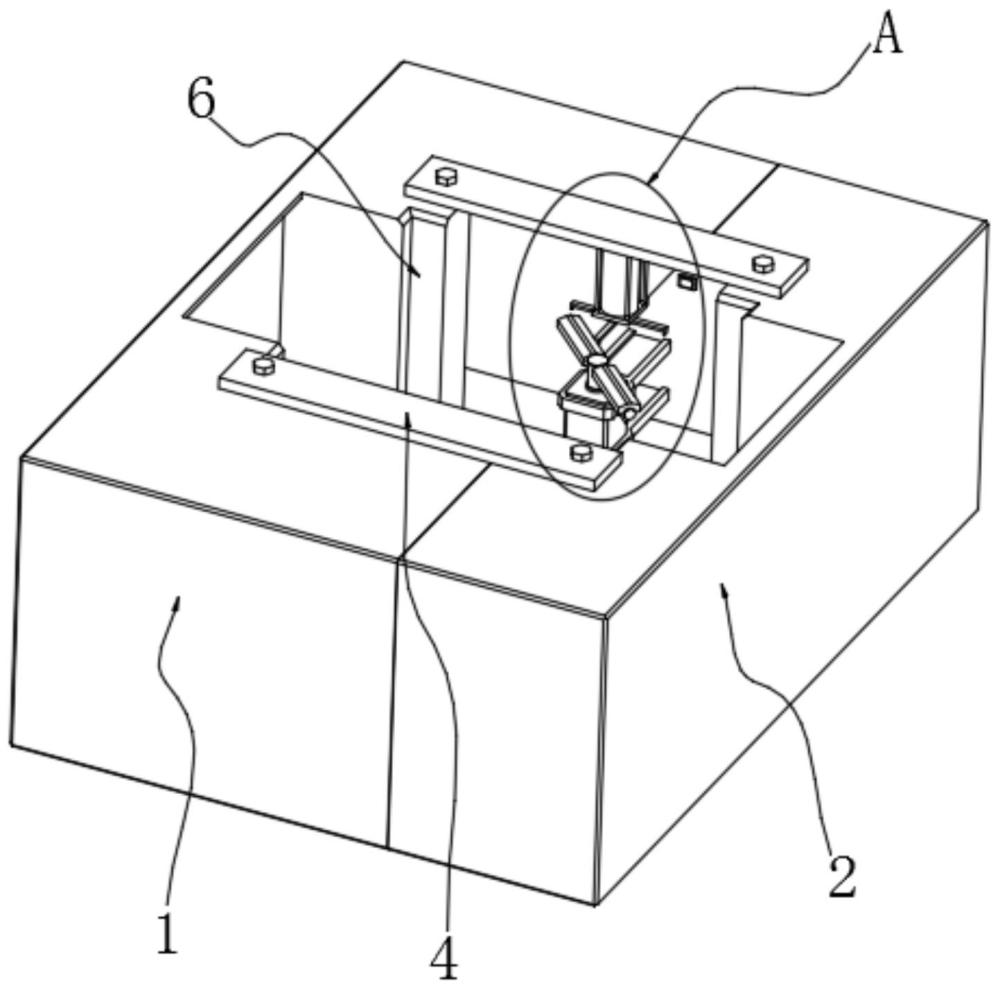
14、本发明进一步设置为,所述第一盒体与第二盒体内壁皆设置有用于对刀头进行导向的导向槽,所述第一盒体与第二盒体的底端皆固定连接在底框上,所述底框用于限制刀头向下运动,所述第一盒体与第二盒体的顶端之间相互连接有顶条。
15、通过采用上述技术方案,利用第一盒体与第二盒体内的导向槽对插入的刀头进行导向,同时利用底框限制刀头在竖直方向上的位置,使得伸缩杆在伸长的时候能够准确的穿入到穿孔内。
16、本发明进一步设置为,所述第一盒体的内壁固定有触动开关,所述抽屉被伸缩杆推出后能够触碰到触动开关。
17、通过采用上述技术方案,利用触动开关在抽屉滑动到位后自动启动清扫电机,并控制气杆的伸缩部分伸长,有效的实现了自动化对于镜片的清理工作。
18、综上所述,本发明主要具有以下有益效果:
19、1、本发明通过自动化清理的盒体结构,在刀头内滑动设置能够升降的保护镜片,同一个盒体结构能够对多个相邻的激光切割机器人进行保护镜片的清理,激光切割机器人只需将刀头伸入到盒体内即可自动完成对保护镜片的清理工作,保护镜片在清理完成后也能够自动复位,大幅提高了对于保护镜片的清理效率,降低了工人的劳动强度,进一步的实现了机械自动化;
20、2、本发明通过在电动推杆的伸缩杆前端设置磁铁,同时在抽屉的一端设置能够与伸缩杆前端相吸的磁铁,在抽屉上磁铁的两侧设置弹性卡片,弹性卡片能够穿过刀头并卡在刀头的外壁,使得伸缩杆在伸长的时候能够解除弹性卡片的卡紧状态并将抽屉推出刀头,而在伸缩杆缩回的状态下,由于两个磁铁之间的磁力又能够将抽屉拉回到刀头内部,抽屉在复位的同时,弹性卡片又恢复卡接状态,起到对抽屉限位的作用;
21、3、本发明通过在抽屉上设置能够上下滑动的镜片框,镜片框与抽屉之间连接有弹簧,镜片框在抽屉完全伸出的状态下能够被气杆向下推动,使得镜片下降到合适高度,保护镜片在此状态下能够被转动的清扫棒充分清洁,在气杆复位后镜片框受弹簧的弹力复位,复位后的气杆底端以及清扫棒的顶端皆不会影响抽屉的伸缩,不会影响保护镜片在完成清洁后的缩回,使得保护镜片能够自动完成清洁并复位。
技术特征:
1.一种激光切割机器人的刀头清理装置,包括第一盒体(1)与第二盒体(2),所述第一盒体(1)与第二盒体(2)之间插入有刀头(7),所述刀头(7)内滑动连接有抽屉(16),其特征在于:所述第一盒体(1)与第二盒体(2)内皆设置有推动结构,所述推动结构用于推出与拉回抽屉(16),所述第一盒体(1)内在远离推动结构的一端转动设置有多根清扫棒(11),所述抽屉(16)内上下滑动连接有镜片框(17),且与镜片框(17)之间通过多个弹簧(18)相接,所述镜片框(17)内设置有镜片(19),所述第一盒体(1)内设置有用于将镜片框(17)压下的下压结构,所述镜片框(17)被下压结构压下后,所述镜片(19)的底面能够被多根清扫棒(11)清扫。
2.根据权利要求1所述的激光切割机器人的刀头清理装置,其特征在于:所述第一盒体(1)与第二盒体(2)内皆设置有电动推杆(8),所述电动推杆(8)连接有伸缩杆(9),所述伸缩杆(9)的前端设置有凹槽,且在凹槽内设置有第二磁铁(25),所述抽屉(16)对应伸缩杆(9)的位置处固定连接有凸柱(22),所述凸柱(22)的前端固定连接有能够与第二磁铁(25)相吸的第一磁铁(24),所述第一磁铁(24)的两侧皆固定连接有弹性卡片(23),所述刀头(7)的侧壁上设置有供弹性卡片(23)伸出的穿孔(26),所述伸缩杆(9)能够通过穿孔(26)伸入刀头(7)内。
3.根据权利要求2所述的激光切割机器人的刀头清理装置,其特征在于:所述第一磁铁(24)的直径与第二磁铁(25)相同,所述凸柱(22)的直径小于伸缩杆(9)前端凹槽部分的内径,所述弹性卡片(23)伸出穿孔(26)时能够限制抽屉(16)移动,所述弹性卡片(23)能够卡入伸缩杆(9)前端的凹槽内,所述伸缩杆(9)的外径小于穿孔(26)的直径。
4.根据权利要求1所述的激光切割机器人的刀头清理装置,其特征在于:所述第一盒体(1)内设置有气杆(12),所述气杆(12)的伸缩部分向下并固定连接有压框(13),所述压框(13)能够与镜片框(17)接触并将镜片框(17)压下。
5.根据权利要求4所述的激光切割机器人的刀头清理装置,其特征在于:所述镜片框(17)的顶面固定设置有环形的压台(20),所述压框(13)与压台(20)相接触,且边缘处皆设置有朝向下方的凸起,所述压框(13)设置有凸起的部分皆处于远离压台(20)的位置。
6.根据权利要求1所述的激光切割机器人的刀头清理装置,其特征在于:所述第一盒体(1)内固定连接有清扫电机(10),所述清扫电机(10)的输出端固定连接有多根清扫棒(11),所述清扫棒(11)的顶面能够与镜片(19)的底面接触,且底面皆固定连接有叶片(28),所述叶片(28)在清扫电机(10)工作的时候能够产生向下流动的气流。
7.根据权利要求1所述的激光切割机器人的刀头清理装置,其特征在于:所述第一盒体(1)与第二盒体(2)内壁皆设置有用于对刀头(7)进行导向的导向槽(6),所述第一盒体(1)与第二盒体(2)的底端皆固定连接在底框(3)上,所述底框(3)用于限制刀头(7)向下运动,所述第一盒体(1)与第二盒体(2)的顶端之间相互连接有顶条(4)。
8.根据权利要求1所述的激光切割机器人的刀头清理装置,其特征在于:所述第一盒体(1)的内壁固定有触动开关(14),所述抽屉(16)被伸缩杆(9)推出后能够触碰到触动开关(14)。
技术总结
本发明公开了一种激光切割机器人的刀头清理装置,涉及激光切割设备刀头清理装置领域,包括第一盒体与第二盒体,所述第一盒体与第二盒体之间插入有刀头,所述刀头内滑动连接有抽屉,所述第一盒体与第二盒体内皆设置有推动结构,所述推动结构用于推出与拉回抽屉,所述第一盒体内在远离推动结构的一端转动设置有多根清扫棒,所述抽屉内上下滑动连接有镜片框,且与镜片框之间通过多个弹簧相接,所述第一盒体内设置有用于将镜片框压下的下压结构。本发明通过自动化清理的盒体结构,激光切割机器人只需将刀头伸入到盒体内即可自动完成对保护镜片的清理工作,保护镜片在清理完成后也能够自动复位,大幅提高了对于保护镜片的清理效率。
技术研发人员:林凤鸣,张立杰,李明
受保护的技术使用者:深圳市润泽机器人有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!