控制摆焊机器人摆焊运动的方法以及摆焊机器人系统与流程
本公开实施例涉及焊接,特别涉及一种控制摆焊机器人摆焊运动的方法以及摆焊机器人系统。
背景技术:
1、随着制造业的高速发展,机器人系统已被广泛应用在自动化制造领域。对焊接机器人来说,摆焊是指机器人控制焊枪在焊接移动路径上以特定角度周期性左右摇摆进行焊接,扩大了焊缝的宽度,从而提高焊接强度。
2、目前的摆焊机器人在进行摆焊运动时,机器人的大臂也需要通过摆动来实现摆焊动作。在许多焊接应用中,摆焊机器人的焊枪往往需要进行高频的摆动。然而,机器人的大臂具有较大的质量,机器人摆焊的惯量也较大,这就使得机器人在摆焊运动的过程中不能获得较高的摆动频率,影响摆焊机器人的焊接效率。
技术实现思路
1、本公开实施例提供一种控制摆焊机器人摆焊运动的方法以及摆焊机器人系统,至少有利于提高摆焊机器人的焊接效率。
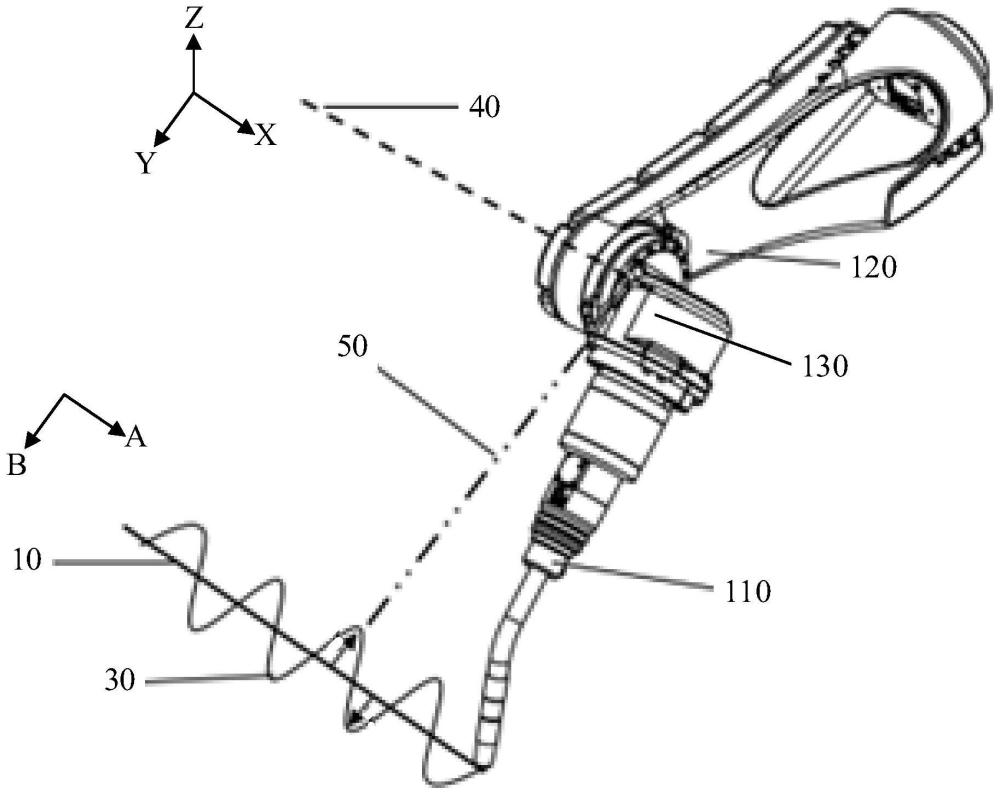
2、根据本公开一些实施例,本公开实施例一方面提供一种控制摆焊机器人摆焊运动的方法,包括:预设位于所述待焊接工装上的焊接路径,以及焊枪相对于所述焊接路径的参数,所述焊接路径的延伸方向为第一方向,平行于所述待焊接工装表面且垂直于所述焊接路径的方向为第二方向;根据所述焊接路径以及所述焊枪相对于所述焊接路径的参数获取摆焊路径,所述焊接路径的两侧均具有所述摆焊路径,且所述摆焊路径中包括多个连续的焊接点;所述摆焊机器人的机械臂结构控制所述腕关节沿第一方向移动,所述腕关节控制所述焊枪末端沿第二方向移动,所述机械臂结构与所述腕关节共同控制所述焊枪末端移动,以使所述摆焊机器人在所述待焊接工装表面沿所述摆焊路径焊接。
3、在一些实施例中,所述腕关节沿腕关节路径移动,所述腕关节路径沿所述第一方向延伸,所述摆焊机器人的所述机械臂结构控制所述腕关节沿第一方向移动包括:获取所述摆焊路径中的下一所述焊接点,根据下一所述焊接点的位置获取所述腕关节的下一位置,所述腕关节的下一位置位于下一所述焊接点在所述腕关节路径上的投影位置处。
4、在一些实施例中,所述腕关节控制所述焊枪末端沿第二方向移动包括:根据下一所述焊接点的位置获取与下一所述焊接点对应的所述焊枪末端的位置;根据与下一所述焊接点对应的所述焊枪末端的位置与所述腕关节的下一位置得到位置矢量;根据所述位置矢量进行逆运动学求解,以获得下一焊接点所对应的所述腕关节角度;控制所述腕关节转动以调节至下一所述焊点所对应的所述腕关节角度,从而控制所述焊枪末端沿所述第二方向移动。
5、在一些实施例中,根据下一所述焊接点的位置获取与下一所述焊接点对应的所述焊枪末端的位置包括:使得所述腕关节的下一位置、下一所述焊接点对应的所述焊枪末端的位置以及下一所述焊接点位于同一直线上;根据几何关系,通过下一所述焊接点的位置与所述腕关节的下一位置获得与下一所述焊接点对应的所述焊枪末端的位置。
6、在一些实施例中,根据所述位置矢量进行逆运动学求解,以获得下一焊接点所对应的所述腕关节角度包括:以所述腕关节为原点建立立体直角坐标系,所述立体直角坐标系中的x轴与所述焊接路径平行,所述腕关节连接的所述焊枪与所述立体直角坐标系的三个轴向之间的夹角分别为角度一、角度二以及角度三,其中,焊枪与x轴的夹角为角度一;获取所述腕关节与所述待焊接工装之间的距离为第一距离;固定角度一不变,根据所述位置矢量与所述第一距离,求得下一焊接点所对应的所述腕关节的角度二与角度三。
7、在一些实施例中,所述焊枪相对于所述焊接路径的参数至少包括:所述焊接路径两侧,所述焊接点与所述焊接路径之间的最大距离、摆焊运动的频率以及可接受的公差。
8、在一些实施例中,所述焊接路径为直线。
9、在一些实施例中,所述摆焊路径为正弦曲线。
10、根据本公开一些实施例,本公开实施例另一方面还提供一种摆焊机器人系统,包括:基座;机械臂结构,所述机械臂结构的一端与所述基座相连接,所述机械臂结构的另一端具有腕关节;焊枪,所述焊枪与所述腕关节相连接;控制器,所述控制器用于控制所述腕关节转动以使所述焊枪进行摆动,所述控制器还用于控制所述机械臂结构进行移动,所述机械臂结构的移动方向与所述焊枪的摆动方向不同。
11、在一些实施例中,所述机械臂结构包括:大臂,所述大臂的一端与所述基座相连接;小臂,所述小臂的一端具有所述腕关节;驱动壳,所述驱动壳连接所述小臂以及所述大臂。
12、本公开实施例提供的技术方案至少具有以下优点:
13、本公开实施例提供的控制摆焊机器人摆焊运动的方法,首先预设位于待焊接工装上的焊接路径,以及焊枪相对于焊接路径的参数,焊接路径的延伸方向为第一方向,平行于待焊接工装表面且垂直焊接路径的方向为第二方向;根据焊接路径以及焊枪相对于焊接路径的参数获取焊接路径,焊接路径两侧均具有摆焊路径,摆焊路径包括多个焊接点;摆焊机器人机械臂结构控制腕关节沿第一方向移动,腕关节控制焊枪沿第二方向移动,机械臂结构与腕关节共同控制焊枪末端移动,以使焊接机器人沿摆焊路径焊接。在相关技术中,摆焊机器人的机械臂结构控制焊枪沿第一方向与第二方向移动,而腕关节处一般保持一定的角度不变,即,摆焊机器人的机械臂结构控制摆焊机器人焊枪沿摆焊路径移动。然而,在第二方向上,摆焊机器人在摆焊运动的过程中一般需要具有较大的频率,换句话说,摆焊机器人在第二方向上的运动是需要进行在短时间内进行多次折返的。此时若控制摆焊机器人在第二方向上运动的机械臂结构具有较大的质量以及惯量,则摆焊机器人在第二方向上进行折返所需要的时间也会相应增加,这就会使得摆焊机器人摆焊运动的频率降低,使得摆焊机器人摆焊的效率较低。而在本申请中,摆焊机器人的焊枪末端仅通过腕关节的转动沿第二方向移动,焊枪在第二方向的移动不需要通过机械臂结构进行,因此,本申请中腕关节控制焊枪末端在第二方向可以在短时间内进行多次折返,从而能够提高摆焊机器人的焊接效率。
技术特征:
1.一种控制摆焊机器人摆焊运动的方法,其特征在于,包括:
2.根据权利要求1所述的控制摆焊机器人摆焊运动的方法,其特征在于,所述腕关节沿腕关节路径移动,所述腕关节路径沿所述第一方向延伸,所述摆焊机器人的所述机械臂结构控制所述腕关节沿第一方向移动包括:
3.根据权利要求2所述的控制机器人摆焊运动的方法,其特征在于,所述腕关节控制所述焊枪末端沿第二方向移动包括:
4.根据权利要求3所述的控制机器人摆焊运动的方法,其特征在于,根据下一所述焊接点的位置获取与下一所述焊接点对应的所述焊枪末端的位置包括:
5.根据权利要求3所述的控制机器人摆焊运动的方法,其特征在于,根据所述位置矢量进行逆运动学求解,以获得下一焊接点所对应的所述腕关节角度包括:
6.根据权利要求1所述的控制机器人摆焊运动的方法,其特征在于,所述焊枪相对于所述焊接路径的参数至少包括:所述焊接路径两侧,所述焊接点与所述焊接路径之间的最大距离、摆焊运动的频率以及可接受的公差。
7.根据权利要求1所述的控制机器人摆焊运动的方法,其特征在于,所述焊接路径为直线。
8.根据权利要求7所述的控制机器人摆焊运动的方法,其特征在于,所述摆焊路径为正弦曲线。
9.一种摆焊机器人系统,其特征在于,包括:
10.根据权利要求9所述的摆焊机器人系统,其特征在于,所述机械臂结构包括:
技术总结
本公开实施例涉及焊接技术领域,提供一种控制摆焊机器人摆焊运动的方法以及摆焊机器人的系统,控制摆焊机器人摆焊运动的方法包括:预设位于待焊接工装上的焊接路径,以及焊枪相对于焊接路径的参数,焊接路径的延伸方向为第一方向,平行于待焊接工装表面且垂直于焊接路径的方向为第二方向;根据焊接路径以及焊枪相对于焊接路径的参数获取摆焊路径,焊接路径的两侧均具有摆焊路径,且摆焊路径中包括多个连续的焊接点;摆焊机器人的机械臂结构控制腕关节沿第一方向移动,腕关节控制焊枪末端沿第二方向移动,机械臂结构与腕关节共同控制焊枪末端移动,以使摆焊机器人在待焊接工装表面沿摆焊路径焊接。至少可以提高摆焊机器人的焊接效率。
技术研发人员:曾海,邓洪洁,刘天华,陈伟
受保护的技术使用者:上海新时达机器人有限公司
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!